一种基于栅格划分的共享单车电子围栏位置优化方法与流程
本发明涉及电子围栏规划建设,具体涉及一种基于栅格划分的共享单车电子围栏位置优化方法。
背景技术:
1、共享单车是共享经济和物联网快速发展的产物,作为一种低碳环保的交通方式,它不仅解决了市民公共交通出行的最后一公里问题,而且有效地缓解了交通拥堵和环境污染,为实现碳达峰和碳中和的目标做出了重要贡献。
2、共享单车经历了从有桩到无桩的发展历程,无桩共享单车的快速发展极大地放大了共享单车的各种好处,但也产生了许多新的城市问题,在这些问题中,最严重的一个便是乱停乱放行为。最近,交通管理部门开始对无桩共享单车的停放进行规范管理,电子围栏技术是用来解决无桩共享单车乱停乱放问题的首选,它可以引导用户在指定区域内规范停放单车。从技术上讲,无桩共享单车的电子围栏是一个预先确定的虚拟围栏,电子围栏系统利用蓝牙信号识别技术、卫星定位技术或者射频识别装置来确定无桩共享单车和指定区域之间的距离。如果用户将无桩共享单车停放在电子围栏区域外,系统将对用户收取一定的惩罚费用,这一措施将会迫使用户养成良好的共享单车使用习惯。
3、以往和电子围栏规划建设方法有关的研究主要围绕着共享单车的停车区域展开,有的研究以求解数学模型作为直接研究方法,比如郝斌斌等人提出了一种基于最小点覆盖的共享单车投放点选取算法,yan等人是将问题抽象为车辆路径问题进行共享单车停放地点的研究,cintrano等人则把共享单车存放点问题看作p-中值问题进行分析,而shi等人则将电子围栏规划问题表述为一个区域覆盖最大化问题,并且提出了一种具有互补覆盖的加速最大覆盖模型来定位电子围栏规划区域,这样做提高了求解的精度和可靠性。其余的大部分研究基本上采用聚类的方法来进行研究,像fu等人使用时空聚类算法来寻求自行车区域最优划分方法,而jia等人则是采用基于深度q-learning的无模型智能研究方法,该方法能够适应客户到达、可用自行车、自行车位置和用户出行时间的变化分布。
4、在做电子围栏规划方案时,现有方法通常把电子围栏的建设数量和位置分布分开考虑,先使用数学模型求出电子围栏的数量,再使用聚类方法求出电子围栏的位置,而且大多数也没有依据实际的共享单车使用情况对电子围栏规划做出调整,这样导致电子围栏规划的准确度和可靠性不高。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种基于栅格划分的共享单车电子围栏位置优化方法,以提高电子围栏规划的准确度和可靠性。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、一种基于栅格划分的共享单车电子围栏位置优化方法,包括以下步骤:
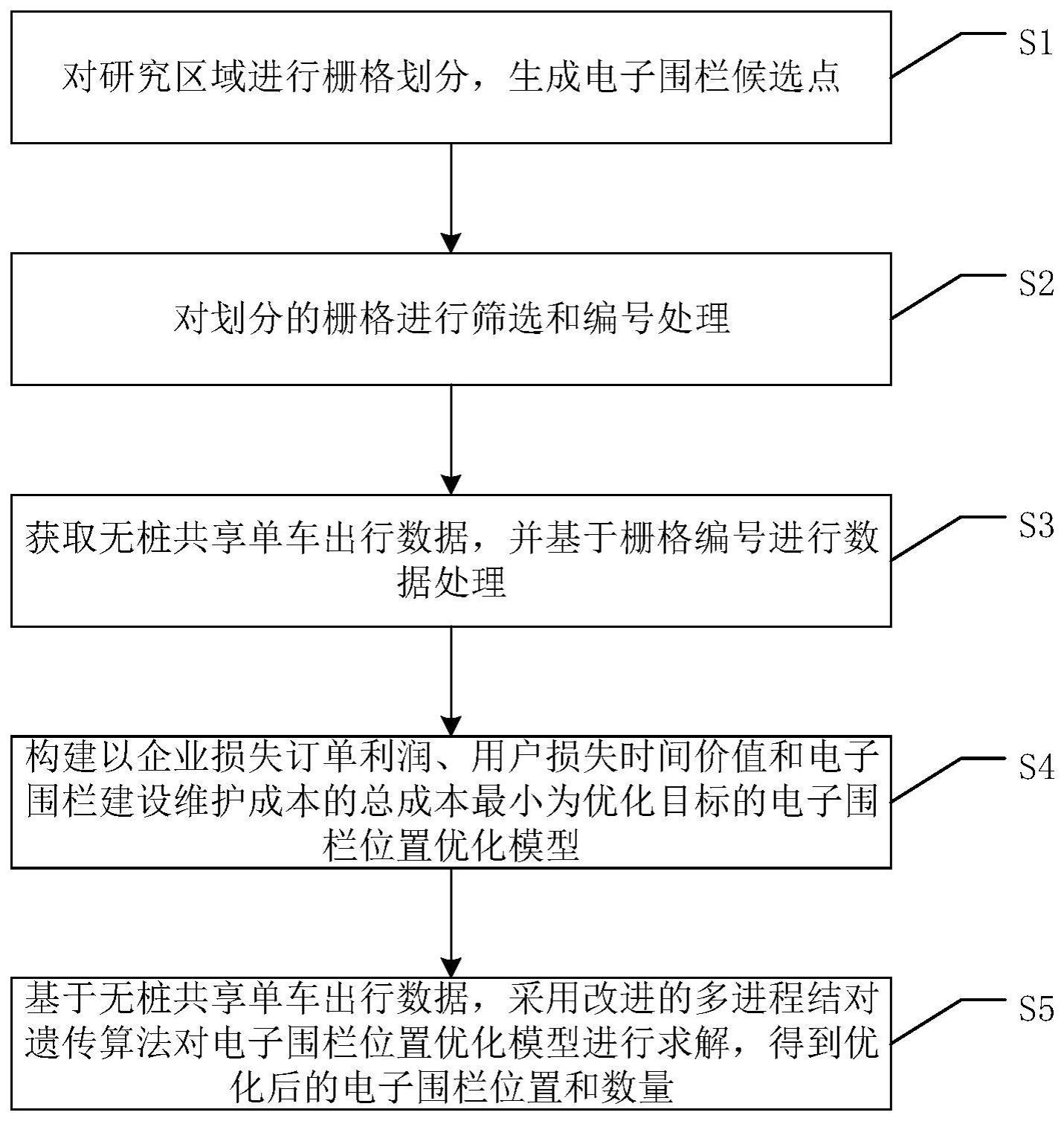
4、s1、对研究区域进行栅格划分,生成电子围栏候选点;
5、s2、对划分的栅格进行筛选和编号处理;
6、s3、获取无桩共享单车出行数据,并基于栅格编号进行数据处理;
7、s4、构建以企业损失订单利润、用户损失时间价值和电子围栏建设维护成本的总成本最小为优化目标的电子围栏位置优化模型;
8、s5、基于步骤s3处理后的无桩共享单车出行数据,采用改进的多进程结对遗传算法对电子围栏位置优化模型进行求解,得到优化后的电子围栏位置和数量。
9、可选地,步骤s1具体包括:
10、将研究区域划分为大小相同的若干个六边形栅格,并以划分的每个六边形栅格作为电子围栏候选点,每个六边形栅格的中心点作为电子围栏位置。
11、可选地,步骤s3具体包括:
12、获取无桩共享单车出行数据,所述无桩共享单车出行数据包括订单编号、出发时间、出发经度、出发纬度、到达时间、到达经度、到达纬度;
13、根据出发经度和出发纬度确定出发地对应的栅格编号;
14、根据到达时间和到达经度确定目的地对应的栅格编号。
15、可选地,步骤s4中企业损失订单利润具体为:
16、
17、其中,c_enterprise为企业损失订单利润,c1为每个订单的企业利润,m为总订单量,pio为第i个订单的出发地到最近的电子围栏的距离dio对应的订单成交概率,pid为第i个订单的目的地到最近的电子围栏的距离did对应的订单成交概率。
18、可选地,步骤s4中用户损失时间价值具体为:
19、
20、其中,c_user为用户损失时间价值,c2为用户单位时间价值,v为用户从出发地前往电子围栏或从电子围栏前往目的地的步行速度。
21、可选地,步骤s4中电子围栏建设维护成本具体为:
22、
23、其中,c_ef为电子围栏建设维护成本,c3为单个电子围栏的建设维护成本,n为电子围栏的数量,xj为建设电子围栏的决策变量。
24、可选地,步骤s4中构建的电子围栏位置优化模型具体为:
25、minimize:c_enterprise+c_user+c_ef
26、s.t.pio=f(dio)
27、pid=f(did)
28、xj=0/1
29、其中,minimize为最小化函数,f(·)为订单成交概率与用户取车还车地点到最近的电子围栏的距离的关系函数。
30、可选地,订单成交概率与用户取车还车地点到最近的电子围栏的距离的关系函数具体为:
31、
32、其中,p为订单成交概率,d为用户取车还车地点到最近的电子围栏的距离,dm为距离阈值。
33、可选地,步骤s5中采用改进的多进程结对遗传算法对电子围栏位置优化模型进行求解具体包括:
34、s51、以电子围栏数量作为染色体长度,以电子围栏编号作为基因编号,利用初始种群函数生成初始种群;
35、s52、将初始种群分散到多个进程中,同时对所有个体进行两两随机组合,构成亲本对,并利用每个亲本对产生两个子代,与亲本对组成家庭,生成初始结对种群;
36、s53、对当前结对种群中的每个家庭进行适应度评估;
37、s54、判断当前迭代是否达到最大迭代次数;
38、若是,则将每个进程的最优解并入最优解集合,再从最优解集合中选择适应度最小的最优解作为求解结果;
39、否则执行步骤s55:
40、s55、判断结对种群的结对期限是否终止;
41、若是,则将当前结对种群中的每个家庭的最优子代作为新家庭的第一个父代,然后从其它家庭中随机选择一个子代作为新家庭的第二个父代,进行结对重组并执行步骤s57;
42、否则执行步骤s56;
43、s56、判断当前结对种群中的每个家庭的父代结对时是否发生越界行为;
44、若是,则从亲本对中选择适应度较优的一个父代,再从其它亲本对中随机选择一个父代进行临时配对;
45、否则直接执行步骤s57;
46、s57、对所有家庭执行交叉和变异操作后,按照贪心算法进行子代竞争并返回步骤s53。
47、可选地,所述按照贪心算法进行子代竞争具体为:
48、将当前迭代过程中得到的两个子代与上次迭代过程得到的两个子代进行竞争,从四个子代中选择适应度较高的两个子代,与亲本对继续组成家庭。
49、本发明具有以下有益效果:
50、本发明通过将共享单车运营范围划分为多个正六边形栅格,并将每个栅格是否设置电子围栏设为决策变量,并且同时考虑了企业损失订单利润、用户损失时间价值和电子围栏建设维护成本的多影响因素,构建以系统总成本最小为目标的电子围栏位置优化模型,最后采用改进的多进程结对遗传算法对电子围栏位置优化模型进行求解,得到优化后的电子围栏位置和数量,能够显著提高共享单车电子围栏位置优化的准确度和可靠性,并且提升模型求解效率。
- 还没有人留言评论。精彩留言会获得点赞!