一种露天矿山无人驾驶车的路权冲突检测方法及系统与流程
本发明涉及无人驾驶,具体而言,涉及一种露天矿山无人驾驶车的路权冲突检测方法及系统。
背景技术:
1、在露天矿山无人驾驶领域中,车辆的路权计算是车辆控制的重要环节。路权计算以高精地图数据、车辆实时状态数据为基础,从全局角度考虑矿区内所有车辆的位置,进而给车辆分配车道的使用权。
2、车辆路权分配是露天矿无人驾驶安全防护体系的重要组成部分,在无人驾驶作业的装运卸各环节均要进行路权管控。
3、矿区的道路状况比较复杂,部分道路宽度较大,能允许两个车同时相向通过。部分道路宽度较小,同一时刻,只能允许一辆车通行。此外,还有路口、工作区等区域。在路口和单行道区域中,不同方向的车道之间存在空间交叉或接近的情况,即为无法允许不同方向的车同时通过,该区域被称为路权冲突易发区,是路权管控环节中重点关注的区域。除此之外,在矿区装卸载区中,由于存在多个装载停靠位或卸载停靠位,驶入到停靠位的车道与从停靠位驶出的车道间也会存在交叉;因此,工作区也是典型的路权冲突易发区,容易造成多车距离过近而可能发生的安全事故的问题。
4、为此提出一种露天矿山无人驾驶车的路权冲突检测方法及系统,以解决上述提出的问题。
技术实现思路
1、本发明旨在提供一种露天矿山无人驾驶车的路权冲突检测方法及系统,以解决或改善在路权冲突易发区内,车辆位置较为接近,容易引起车辆路权之间的冲突,进而增加迎面或侧面碰撞的风险,引发安全事故,造成作业流程中断的问题。
2、有鉴于此,本发明的第一方面在于提供一种露天矿山无人驾驶车的路权冲突检测方法。
3、本发明的第二方面在于提供一种露天矿山无人驾驶车的路权冲突检测系统。
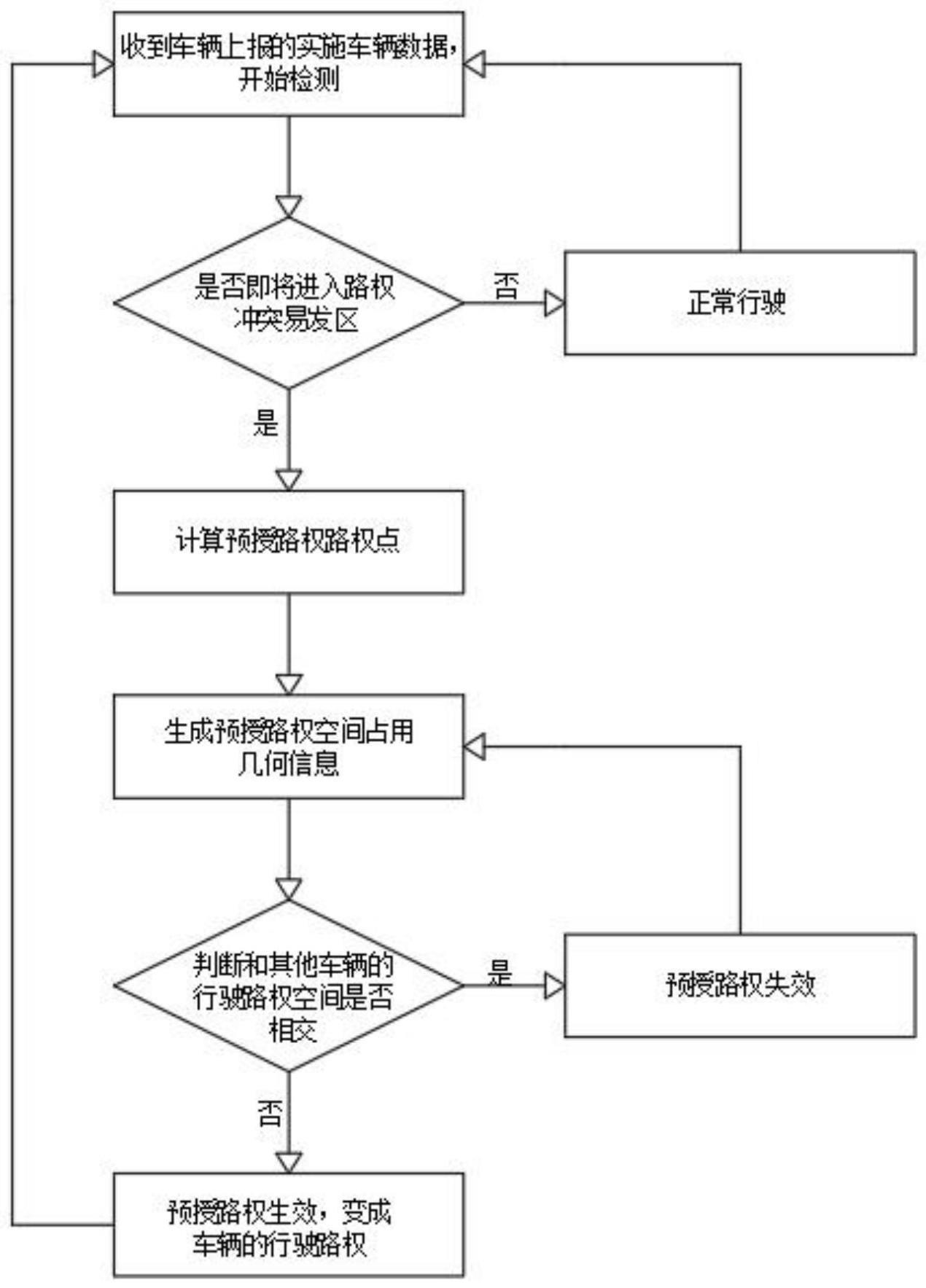
4、本发明的第一方面提供了一种露天矿山无人驾驶车的路权冲突检测方法,包括如下步骤:s1,从矿区地图中获取只能供单车通行的关键点,并以关键点为中心规划多边形的路权冲突易发区;s2,基于路测设备,实时获取当前矿卡的行车数据和矿区地图数据,并判断是否将要驶入所述路权冲突易发区,若否则矿卡正常行驶,若是则对矿卡预授路权并进行s3;s3,生成从矿卡到将要驶入路权冲突易发区的路权空间几何区并上传所述矿区地图;s4,判断将要驶入路权冲突易发区上是否有预授路权生效的矿卡的路权空间几何区,若是则停车并返回s3,否若则进行s5;s5,判断在该所述路权冲突易发区内,当前矿卡的路权空间几何区是否与其他预授路权的矿卡的路权空间几何区存在重叠,若是则进行s6,若否则将当前矿卡的路权空间几何区覆盖在当前的路权冲突易发区上,然后进行s7;s6,分别计算各预授路权矿卡到达目的地所需路程,路程最短的矿卡的预授路权生效,并将其路权空间几何区覆盖在路权冲突易发区上,若当前矿卡为路程最短则进行s7,否则停车返回s3;s7,当前矿卡的预授路权生效并通过当前所述关键点,在矿卡脱离其路权空间几何区后,将其路权空间几何区从所述矿区地图中删除并返回s2。
5、本发明提供的一种露天矿山无人驾驶车的路权冲突检测方法,在无人驾驶车进入路权冲突易发区之前,对车辆可能存在的路权冲突进行检测,通过提前检测的做法,能够让车停在路权冲突易发区之外,而不是进入冲突易发区内停车,能够避免车辆相向或者测量撞车;
6、能提前预判路权冲突的发生,使存在潜在冲突的矿卡在进入路权冲突区之前停车,避免了多车距离过近而可能发生的安全事故,进而导致的道路阻塞情况,提升了无人驾驶车的行驶安全性和作业效率。
7、具体地,对于矿卡将要驶入的情况,由于车辆行驶的信息可以获得,即车辆在那条道路上的什么位置可以获得,根据这些信息就可以判断车辆是否即将驶入,判断距离为50m;矿卡停车,其道路上的位置就被占用了,针对后续车辆的路权安排也会考虑,不会超过该位置,即两车的行驶路线不会发生时空上的冲突,例如通过紧急停车等来避免车辆相撞。
8、另外,根据本发明的实施例提供的技术方案还可以具有如下附加技术特征:
9、上述任一技术方案中,所述关键点包括:路口、单行道、工作区的驶入点,路口、单行道、工作区的驶离点,工作区的停靠点;其中,所述工作区包括装载区和卸载区。
10、在该技术方案中,通过对矿区地图中各个可能出现撞车的点位设立关键点,能够最大程度的覆盖矿区中的撞车事故点位,以便后续在路权冲突易发区的规划中能够更多的考虑到矿区中易发生冲突的路口、单行道、工作区。
11、具体地,驶入点和驶离点都是根据地图来确定,地图中会将道路划分为驶入车道和驶出车道,进而确定驶入点和驶离点,对于单行道来说,根据车辆行驶的方向信息来区分距离相近的驶入点和驶离点。
12、上述任一技术方案中,所述路权冲突易发区的规划采用下述规则:以所述关键点为中心建立长方形的路权冲突易发区;和/或所述路权冲突易发区沿该关键点处的矿卡航向对称设置,且宽度大于矿卡的车宽;和/或所述路权冲突易发区的顶点位于改关键点处的路口或单行道或工作区的边缘。
13、在该技术方案中,以所述关键点为中心建立长方形的路权冲突易发区,使得建立的路权冲突易发区能够更加均匀的覆盖关键点周围的道路区域,避免划定的区域偏差过大;
14、由于车辆的形状特性,沿着车头行进方向车身呈轴对称的状态,因此将路权冲突易发区沿该关键点处的矿卡航向对称设置,能够更好的照顾到车身本身的特性,保证车辆通过时不会发生意外的碰撞;
15、将路权冲突易发区的顶点设置在改关键点处的路口或单行道或工作区的边缘上,可使得路权冲突易发区能够更加全棉的覆盖路口或单行道或工作区的区域,避免局部的遗漏,对后续的相交判定造成影响。
16、上述任一技术方案中,所述矿卡的行车数据包括:矿卡的调度目标、行驶方向、当前位置到所述关键点的距离和制动距离。
17、在该技术方案中,通过收集矿卡的调度目标和行驶方向,能够更好的了解矿车的动向,以便判定在行进道路上是否有路权冲突易发区;对当前位置到所述关键点的距离和制动距离的收集,以便控制车辆与路权冲突易发区的距离,以便在发生冲突车辆停车后,车辆能够停止在路权冲突易发区的外面。
18、上述任一技术方案中,所述矿区地图的数据包括:面数据集、线数据集、点数据集;所述面数据集包括:双向路区域、单行路区域、路口区域、装载区域和卸载区域;所述线数据集包括:车道线;所述点数据集包括:路口、单行道、工作区的驶入点,路口、单行道、工作区的驶离点,装载区域和卸载区域的停靠位和停靠点。
19、在该技术方案中,矿区地图的数据通过涵盖面数据集、线数据集、点数据集,能够在尽可能精简的同时对矿区的关键部位进行记录以保证后续的分析能够尽可能的全面。
20、上述任一技术方案中,所述s3的步骤具体包括:s31,将所述路权冲突易发区中距离该矿卡最远点设置为路权点;s32,沿所述车道线,规划从该矿卡车尾到所述路权点的路权空间几何区;s33,将所述路权空间几何区与其对应的路权冲突易发区的重合区域上传至所述矿区地图。
21、在该技术方案中,通过将路权冲突易发区中距离该矿卡最远点设置为路权点,使得矿卡的路权空间几何区能够尽可能多的涵盖路权冲突易发区,避免两个会发生冲突的车辆的路权空间几何区没有相交;
22、将路权空间几何区与其对应的路权冲突易发区的重合区域上传至所述矿区地图,能够避免路权空间几何区中无用的区域被上传判定,降低系统的计算压力。
23、上述任一技术方案中,所述的在该矿卡脱离其路权空间几何区后采用下述规则判定:以所述矿卡的车尾边缘为判定线,当所述判定线与该矿卡的路权空间几何区的纵向交点为零时,判定该矿卡脱离其路权空间几何区。
24、在该技术方案中,为了保证矿卡为全部的脱离路权冲突易发区,采用矿卡尾部边缘在路权空间几何区的纵向交点作为判定标准,使得在交点为零后,其他矿卡开始进入当前的路权冲突易发区时,不会与前一个矿卡相撞。
25、上述任一技术方案中,在s4中,当有路权空间几何区相交时,该矿卡的预授路权为失效状态并保留。
26、在该技术方案中,由于矿卡的行驶目标需求,在预授路权为失效状态后任然需要通过当前的路权冲突易发区,因此将预授路权保留,在当前的路权冲突易发区内部的路权空间几何区没有相交时,对预授路权生效,以便停车的矿卡能够再次启动通过。
27、上述任一技术方案中,对所述矿区地图上的每个路权冲突易发区设定几何中心点,并以几何中心点以预设半径划定圆周判断线,当矿卡在矿区地图上中心点沿该矿卡行驶方向位于所述圆周判断线上时,判定该矿卡将要驶入圆周判断线所对应的路权冲突易发区。
28、本发明的第二方面提供了一种露天矿山无人驾驶车的路权冲突检测系统,包括:车载定位模块,收集车辆的位置信息以及行驶状态信息,用于车辆的定位;通信模块,用于将车辆的信息上传用于路权分配的计算以及路权信息的下发;其中,所述系统用于实施第一方面中任一技术方案所述的方法。
29、本发明提供的一种露天矿山无人驾驶车的路权冲突检测系统,系统实施上述任一技术方案中的一种露天矿山无人驾驶车的路权冲突检测方法的步骤。因此,本技术方案所提出的一种露天矿山无人驾驶车的路权冲突检测系统具备上述任一技术方案中的一种露天矿山无人驾驶车的路权冲突检测方法的全部有益效果,在此不再赘述。
30、本发明与现有技术相比所具有的有益效果:
31、能提前预判路权冲突的发生,使存在潜在冲突的矿卡在进入路权冲突区之前停车,避免了多车距离过近而可能发生的安全事故,进而导致的道路阻塞情况,提升了无人驾驶车的行驶安全性和作业效率。
32、根据本发明的实施例的附加方面和优点将在下面的描述部分中变得明显,或通过根据本发明的实施例的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!