一种交通状态预测集成方法
本发明涉及交通状态预测领域,具体涉及一种具有鲁棒性和最大化多样性的交通状态预测集成方法。
背景技术:
1、在社会经济快速发展的情况下,汽车保有量的急剧增长将导致潜在的交通拥堵、交通事故、严重的环境和噪声污染等问题,其中交通拥堵导致经济损失、出行时间耗费并加剧环境污染;交通事故严重影响社会经济的发展和人民生活的提高,这给社会的可持续发展带来障碍。交通状态预测旨在探究未来时刻的交通运行状态,使城市道路高效的运行,为交通参与者提供高品质的交通服务。基于交通状态预测方法被认为是缓解交通拥堵、预防交通事故、减少排放和燃料消耗的有效途径。因此,近几十年来,该领域的研究者已提出多种类型的短时交通状态预测方法,包括:基于svm及其改进模型的短时交通状态预测方法、基于集成学习的短时交通状态预测方法、基于深度学习的短时交通状态预测方法等。
2、集成学习通过组合多个表现较好的算法以期望得到一个更好、更全面的预测模型,其中心思想是即便某一个模型得到错误的预测,其他的模型也可以将错误纠正回来。鉴于集成学习较好的预测能力,其被广泛地应用于交通流预测中。大量的实验结果表明,基于集成学习的预测方法具有准确率高、泛化能力强等优势。
3、但是,由于各种不可控因素(如雨雪天气情况、交通拥堵、交通事故、传输失真、传感器通讯故障等),采集的数据中不可避免的含有不正常的数据点(简称异常值)、错误或缺失的数据,这显著地影响了模型的预测精度。尽管可以使用某些预处理方法(如丢弃,填充,替换,重复数据删除等)从样本数据中删除异常值,但不能保证将这些不正常的数据点完全删除。另外,这些异常值可能是模型预测的重要特征,如交通拥堵或交通事故下的交通数据更能反映道路运行的真实情况。因此,提高集成模型的鲁棒性是一项重要且有意义的研究工作。
技术实现思路
1、针对现有技术存在的缺点与不足,本发明的目的在于提供一种具有鲁棒性和最大化多样性的交通状态预测集成方法,本方法可保证即使在外部因素的影响下也可获得较高的预测精度,为交通信息的发布和避免城市道路潜在的交通拥堵提供基础。
2、本发明公开的交通状态预测集成方法,其技术方案包括以下步骤:
3、从不同的交通数据采样点获取交通采样数据,作为待预测数据,其中待预测数据根据相应的交通数据采样点位置划分为相应的多个数据子集;
4、将待预测数据的输入到训练好的鲁棒的且最大化各组件之间多样性的集成模型中,其中所述集成模型根据相应的交通数据采样点位置也划分为相应的多个子模型,待预测数据的每个数据子集分别输入到相应的子模型中得到每个子模型的预测结果,并综合每个子模型的预测结果给出最终的预测值;
5、所述各个子模型的目标函数表示如下:
6、
7、其中, p∈(0,2],||·||2表示l2范数距离, m代表各子模型数据样本类型序号, c为各子模型数据样本类型总数, c m是各子模型第 m类样本对应的最优参数、通过优化算法预先得到,e1 m和e2 m分别是矩阵a m和b m相应维度的单位列向量,矩阵a m表示各子模型第 m类样本组成的数据集合,矩阵b m表示各子模型除第 m类样本外的其余的 m-1类样本组成的数据集合,矩阵a m和b m具有相同维度数 n,q m是各子模型第 m类样本对应的松弛变量、通过上述目标函数的约束条件获得, λ1是预设的平衡集成模型的预测误差和多样性的参数, f(w)表示多样性函数,w m表示各子模型第 m类样本的权向量,b m表示各子模型第 m类样本的偏差,w=[ w1, w2,…, wl] t为多样性加权向量, l为子模型的总数,w m、b m、 f(w)和 p通过迭代优化获得最优值;在上述目标函数中,第一、二项属于集成模型的预测误差,第三项代表多样性,当完成优化时两者实现最优。
8、进一步而言,所述 c m通过果蝇优化算法获得。
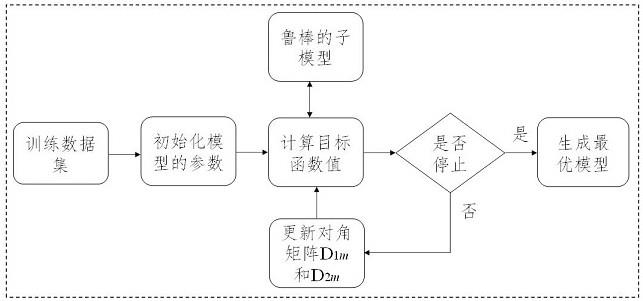
9、进一步而言,通过迭代优化获得得w m、b m、 f(w) 和 p的最优值,是通过迭代更新每个子模型的增广向量,当迭代结束后,得到最优值,具体步骤为:
10、1)设置迭代次数 t和迭代步长 p的初始值分别为1和0.1,初始化增广向量z m1以及对角矩阵d1 m1和d2 m1,其中d1 m1的第 i个对角元素和d2 m1的第 j个对角元素分别为:
11、
12、a i代表矩阵a m中第 i行数据,b j代表矩阵b m中第 j行数据, m1表示矩阵a m的总行数, m2表示矩阵b m的总行数,e1 mi代表e1 m中第 i行数据,e2 mj代表e2 m中第 j行数据;
13、初始化多样性加权向量w;
14、2)计算增广向量z m( t+1),并根据增广向量z m( t+1)更新对角矩阵d1 m( t+1)和d2 m( t+1),具体为:
15、
16、其中, ε为正则化系数,i为单位矩阵;
17、3)当获得增广向量z m( t+1)时,使用交替方向乘子法确定多样性函数 f(w),具体为:
18、
19、其中, l k和 l l分别表示第 k个和 l个子模型,p k表示 l k的预测向量,p l表示 l l的预测向量;矩阵d t的第 k行第 l列为
20、
21、通过 f(w)的拉格朗日函数,计算获得多样性加权向量的下一次迭代值w( t+1):
22、w( t+1) =(α te-β t)/( λ1d t)
23、其中,α t和β t代表迭代次数为 t时 f(w)非负的拉格朗日乘子,e是相应维度的单位列向量;
24、4)根据步骤2)所得到增广向量z m( t+1)获得权向量w m和偏差b m,结合步骤3)获得的多样性函数 f(w)和迭代步长 p,根据子模型目标函数,计算本次迭代的子模型目标函数值;
25、如果迭代次数 t等于1,则更新迭代次数 t=t+1及 p=p+0.1,返回步骤2)继续迭代;
26、如果迭代次数 t大于1,则比较本次迭代的子模型目标函数值与前次迭代的子模型目标函数值,如两者差值小于预设的阈值,或者迭代次数 t大于预设的上限值,就停止迭代,本次迭代获得的权向量w m、偏差b m、多样性函数 f(w)以及迭代步长 p就是相应的最优值,否则更新迭代次数 t=t+1及 p=p+0.1,返回步骤2)继续迭代。
27、进一步而言,所述预设的阈值为0.001。
28、进一步而言,所述预设的上限值为20。
29、进一步而言,在将待预测数据的每个数据子集分别输入到相应的子模型中得到每个子模型的预测结果后,对每个子模型的预测结果进行加权投票给出最终的预测值。
30、进一步而言,训练鲁棒的且最大化各组件之间多样性的集成模型所采用的训练数据,是从不同的交通数据采样点获取交通采样数据中选取一部分作为训练数据集,根据相应的交通数据采样点位置划分为相应的多个训练子集。
31、进一步而言,在采用的训练数据时,还从获取交通采样数据中选取一部分作为测试数据集,用于对训练的鲁棒的且最大化各组件之间多样性的集成模型的预测结果进行测试。
32、本发明的有益效果如下:本发明构建鲁棒的且最大化各组件之间多样性的集成模型,将每个训练数据子集输入相应的子模型进行训练;通过设计的迭代算法更新每个子模型,当迭代结束后,生成最优的预测模型,把待预测数据集输入至生成的子模型,从而获得每个子模型的预测结果,在此基础上给出最终的预测值。因此,本发明利用鲁棒的且最大化多样性的集成模型可以有效地缓和短时交通状态预测中异常值的影响,增强了模型的鲁棒性,并提高了模型的预测精度,构建的集成模型具有较高的灵活性,完全适用于正常场景和复杂场景的短时交通状态预测,为城市道路交通的有序、高效通行提供强有力的保障。
- 还没有人留言评论。精彩留言会获得点赞!