危险预警方法和系统与流程
本发明涉及交通安全,尤其涉及一种危险预警方法和系统。
背景技术:
1、在路侧设有停车区域的道路上,行人和非机动车在没有交通信号灯提示的状态下,随意横穿马路,驾驶人因为路侧车辆的遮挡,无法实时观察到可能突然出现的行人及其他交通参与者,容易出现“鬼探头”类的交通事故,影响交通安全。
2、针对该问题,当前所采取的解决办法主要分为两类,一类是通过安装转角镜,以减少驾驶员视野盲区,减少事故发生的可能性;另一类是通过云端互联的方式,将车辆及行人等信息进行分析,有危险时通过联网设备将危险信息告知驾驶员。
3、但上述两种方式均存在局限性。第一种方式,传统方式的转角镜虽然能够减少视野盲区,但能够减少的盲区十分有限,无法有效地解决路侧盲区问题。而第二种通过云端互联的方式进行预警,则对车辆的智能化程度要求很高。而当下非智能车和智能车混行状态会持续很长时间,因此,也不适用。
4、基于此,当前,针对非智能车和智能车混行的交通状态,尚没有一种有效的预警方式,减少视野盲区,避免发生“鬼探头”类的交通事故。
技术实现思路
1、为解决当前,针对非智能车和智能车混行的交通状态,尚没有一种有效的预警方式,减少视野盲区,避免发生“鬼探头”类的交通事故的技术问题,本发明实施例提供一种危险预警方法和系统。
2、本发明实施例的技术方案是这样实现的:
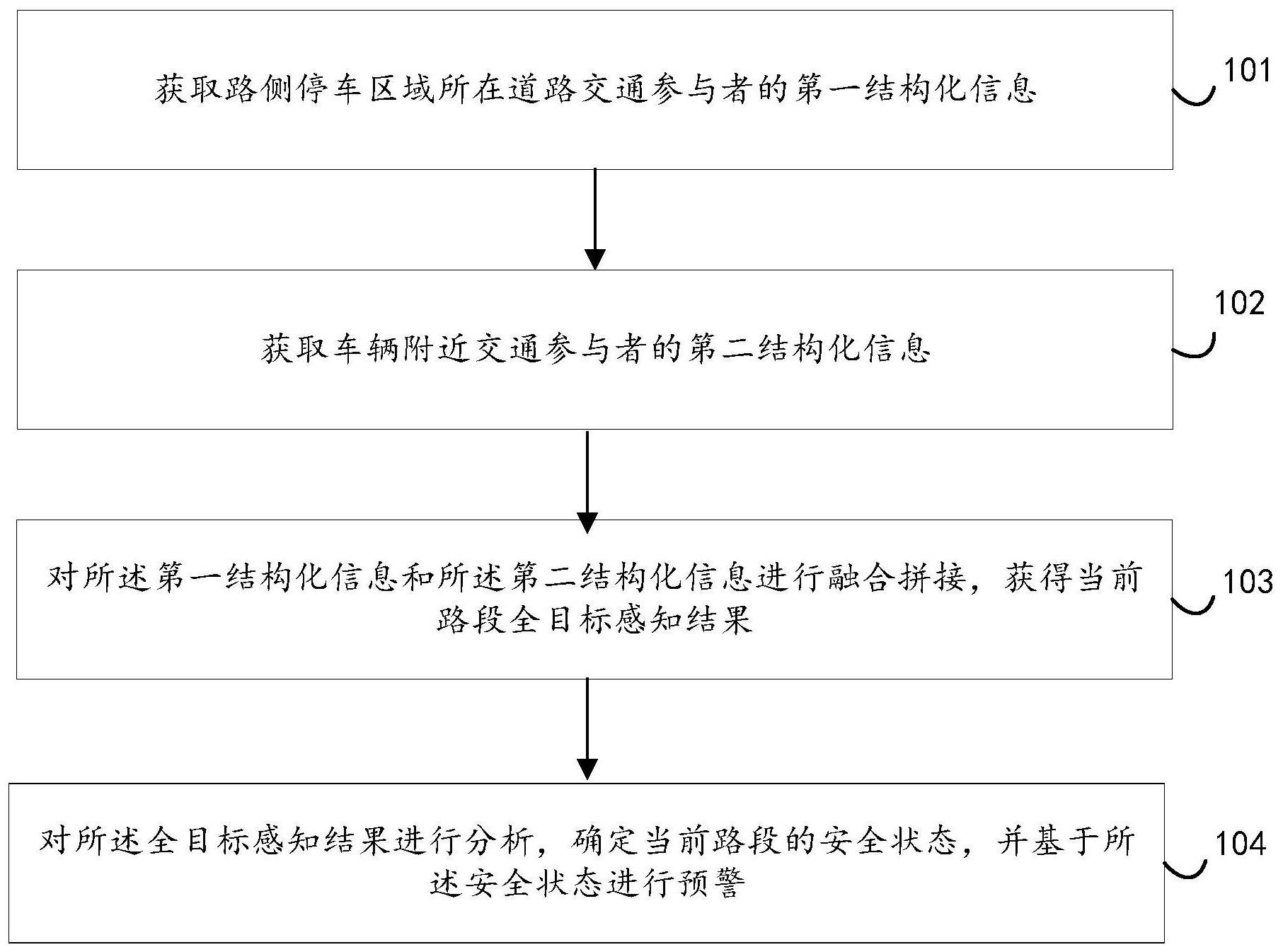
3、本发明实施例提供了一种危险预警方法,方法包括:获取路侧停车区域所在道路交通参与者的第一结构化信息;获取车辆附近交通参与者的第二结构化信息;对所述第一结构化信息和所述第二结构化信息进行融合拼接,获得当前路段全目标感知结果;对所述全目标感知结果进行分析,确定当前路段的安全状态,并基于所述安全状态进行预警。
4、上述方案中,所述获取路侧停车区域所在道路交通参与者的第一结构化信息,包括:利用路侧感知单元测量和输出路侧停车区域所在道路交通参与者的第一结构化信息;其中,所述路侧感知单元固定设于路侧停车区域所在道路上。
5、上述方案中,所述获取车辆附近交通参与者的第二结构化信息,包括:通过所述摄像头和所述雷达采集车辆附近交通参与者的传感器数据;利用所述驾驶域控制器对所述传感器数据进行数据处理后,输出车辆附近交通参与者的第二结构化信息;其中,所述摄像头、所述雷达和所述驾驶域控制器位于当前路段上行驶的车辆。
6、上述方案中,所述利用所述驾驶域控制器对所述传感器数据进行数据处理后,输出车辆附近交通参与者的第二结构化信息,包括:获取本车经纬度信息,以及本车与附近交通参与者的相对位置信息;根据所述本车经纬度信息和所述本车与附近交通参与者的相对位置信息,进行坐标转换,确定本车附近交通参与者的经纬度信息。
7、上述方案中,所述对所述第一结构化信息和所述第二结构化信息进行融合拼接,获得当前路段全目标感知结果,包括:利用异源目标信息融合算法对所述第一结构化信息和所述第二结构化信息进行去重;基于去重结果,获取当前路段的全目标感知结果。
8、上述方案中,所述利用异源目标信息融合算法对所述第一结构化信息和所述第二结构化信息进行去重,包括:获取第一结构化信息中的目标经度、纬度,速度以及航向角数据,以及第二结构化信息中的目标经度、纬度,速度以及航向角数据;根据所述第一结构化信息中的目标经度、纬度,速度以及航向角数据,和所述第二结构化信息中的目标经度、纬度,速度以及航向角数据,计算两个目标之间的时间差;将所述时间差乘以预设速度,获得参考距离;判断两个目标之间的实际距离是否大于所述参考距离,基于判断结果确定两个目标是否为同一目标。
9、上述方案中,所述对所述全目标感知结果进行分析,确定当前路段的安全状态,包括:确定所述全目标感知结果中每个目标当前位置信息,当前车速、当前航向角数据下预设一段时间后所到达的位置信息;将每个目标当前位置信息和当前航向角数据下预设一段时间后所到达的位置信息进行连接;比较不同目标的位置连线之间是否存在交叉,基于比较结果确定当前路段的安全状态。
10、上述方案中,所述比较不同目标的位置连线之间是否存在交叉,基于比较结果确定当前路段的安全状态,包括:在当前路段没有其他目标的位置连线时,确定当前路段的安全状态为一级;在当前路段有其他目标的位置连线,且没有交叉时,确定当前路段的安全状态为二级;在当前路段有其他目标的位置连线,且交叉时,确定当前路段的安全状态为三级。
11、上述方案中,所述基于所述安全状态进行预警,包括:利用固定设于路侧停车区域所在道路上的路侧预警单元,以及位于当前路段上行驶车辆上的车端预警单元进行预警。
12、本发明实施例还提供了一种一种危险预警系统,所述系统包括路侧感知单元、路侧直连通信单元、路侧计算单元、路侧预警单元、车端感知单元、车端直连通信单元和车端预警单元;其中,所述路侧感知单元、所述路侧直连通信单元、所述路侧计算单元和所述路侧预警单元固定设于路侧停车区域所在道路上;所述车端感知单元、所述车端直连通信单元和所述车端预警单元位于当前路段上行驶车辆上;所述路侧感知单元,用于获取路侧停车区域所在道路交通参与者的第一结构化信息;所述车端感知单元,用于获取车辆附近交通参与者的第二结构化信息;所述路侧直连通信单元,用于与所述车端直连通信单元进行信息交互;所述车端直连通信单元,用于与所述路侧直连通信单元进行信息交互;所述路侧计算单元,用于对所述第一结构化信息和所述第二结构化信息进行融合拼接,获得当前路段全目标感知结果;对所述全目标感知结果进行分析,确定当前路段的安全状态;所述路侧预警单元,用于根据所述当前路段的安全状态实时预警;所述车端预警单元,用于根据所述当前路段的安全状态在车内实时预警。
13、本发明实施例提供的危险预警方法和系统,通过路侧感知单元获取路侧停车区域所在道路交通参与者的第一结构化信息;通过车端感知单元获取车辆附近交通参与者的第二结构化信息;对所述第一结构化信息和所述第二结构化信息进行融合拼接,获得当前路段全目标感知结果;对所述全目标感知结果进行分析,确定当前路段的安全状态,并基于所述安全状态进行预警。本发明提供的方案通过感知共享和融合拼接的思路,将路侧感知单元感知的第一结构化信息与周围车辆感知的第二结构化信息进行融合拼接,得到当前路段全目标感知结果,并在该全目标感知结果的基础上做预警分析,该方式相比现有的仅通过路侧感知或路侧感知加主车感知的预警方式,能更有效地减少驾驶员和系统感知的盲区,使得用于预警分析的数据来源更全面,让预警结果更有效。
技术特征:
1.一种危险预警方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取路侧停车区域所在道路交通参与者的第一结构化信息,包括:
3.根据权利要求1所述的方法,其特征在于,所述获取车辆附近交通参与者的第二结构化信息,包括:
4.根据权利要求3所述的方法,其特征在于,所述利用所述驾驶域控制器对所述传感器数据进行数据处理后,输出车辆附近交通参与者的第二结构化信息,包括:
5.根据权利要求1所述的方法,其特征在于,所述对所述第一结构化信息和所述第二结构化信息进行融合拼接,获得当前路段全目标感知结果,包括:
6.根据权利要求5所述的方法,其特征在于,所述利用异源目标信息融合算法对所述第一结构化信息和所述第二结构化信息进行去重,包括:
7.根据权利要求1所述的方法,其特征在于,所述对所述全目标感知结果进行分析,确定当前路段的安全状态,包括:
8.根据权利要求7所述的方法,其特征在于,所述比较不同目标的位置连线之间是否存在交叉,基于比较结果确定当前路段的安全状态,包括:
9.根据权利要求1所述的方法,其特征在于,所述基于所述安全状态进行预警,包括:
10.一种危险预警系统,其特征在于,所述系统包括路侧感知单元、路侧直连通信单元、路侧计算单元、路侧预警单元、车端感知单元、车端直连通信单元和车端预警单元;其中,所述路侧感知单元、所述路侧直连通信单元、所述路侧计算单元和所述路侧预警单元固定设于路侧停车区域所在道路上;所述车端感知单元、所述车端直连通信单元和所述车端预警单元位于当前路段上行驶车辆上;
技术总结
本发明公开了一种危险预警方法和系统。其中,方法包括获取路侧停车区域所在道路交通参与者的第一结构化信息;获取车辆附近交通参与者的第二结构化信息;对所述第一结构化信息和所述第二结构化信息进行融合拼接,获得当前路段全目标感知结果;对所述全目标感知结果进行分析,确定当前路段的安全状态,并基于所述安全状态进行预警。本发明提供的方案能有效地减少驾驶员和系统感知的盲区,使得用于预警分析的数据来源更全面,让预警结果更有效。
技术研发人员:陈昌学,李增文,甘桂祥
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!