一种面向自动驾驶的道路交通节点路段行驶适应性评价方法
本发明属于道路安全评价,具体涉及一种面向自动驾驶的道路交通节点路段行驶适应性评价方法。
背景技术:
1、根据自动驾驶公开事故及系统脱离报告数据显示,主要事故类型为追尾事故,相关联因素包括:行驶速度、路段类型(如公路、城市道路、交叉口等)、路段限速及路侧障碍物情况。酿成事故(或自动驾驶系统脱离)的直接原因主要为:自动驾驶系统功能缺陷,如未辨认出前方目标物类别、激活紧急制动的操作失效或警告驾驶人功能失效等;或自然驾驶人过于依赖系统,未关注周围道路交通环境,导致其在系统被动退出后未能及时接管车辆操作。
2、道路交通节点路段作为自动驾驶技术的重要应用场景,其线形设计以驾乘人与传统人工驾驶车辆构成的主体作为主要服务对象,设计方法主要依据驾驶人特性(如视觉特性)与操控能力。因此,有必要重新审视既有道路交通节点路段供给下的自动驾驶行驶适应性问题。
3、目前,国内外已经开始重视对“自动驾驶车辆是否适应现役道路基础设施”相关问题的讨论。然而,大多研究聚焦于普通道路路段(如圆曲线、纵断面线形、车道宽度等),鲜有研究围绕道路交通节点路段,探讨自动驾驶对其的行驶适应性问题。同时,该领域内现有研究受限于测试条件,主要采用理论推算方法,对于自动驾驶系统功能表现假设过于理想,容易造成研究结果较实际情况过于理想。因此,如何在有限测试条件下有效地评价自动驾驶车在道路交通节点路段的行驶适应性成为了保证自动驾驶安全行驶亟需解决的关键问题,并具有重要的现实意义。
技术实现思路
1、本发明所要解决的技术问题是:提供一种面向自动驾驶的道路交通节点路段行驶适应性评价方法,有助于有效评价自动驾驶车在道路交通节点路段的行驶适应性,甄别视距不足的行驶风险位置,为自动驾驶车在既有道路交通节点路段的实际运营安全隐患排查提供有效技术手段。
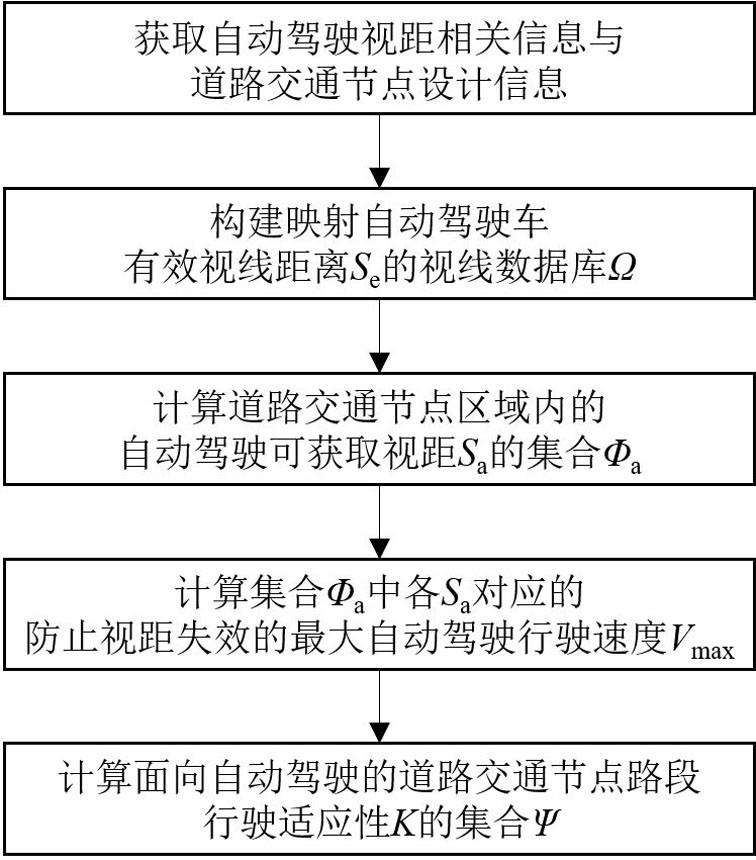
2、其通过获取自动驾驶视距相关信息与道路交通节点设计信息,构建映射自动驾驶车有效视线距离的视线数据库,进一步计算道路交通节点区域内的自动驾驶可获取视距集合及其对应的防止视距失效的最大自动驾驶行驶速度,根据速度协调性评价方法计算道路交通节点路段行驶适应性。本发明能够有效评价自动驾驶车在道路交通节点路段的行驶适应性,甄别视距不足的行驶风险位置,为自动驾驶车在既有道路交通节点路段的实际运营安全隐患排查提供有效技术手段。
3、本发明解决其技术问题具体采用的技术方案是:
4、一种面向自动驾驶的道路交通节点路段行驶适应性评价方法,其特征在于,获取自动驾驶视距相关信息与道路交通节点设计信息,构建映射自动驾驶车有效视线距离的视线数据库,进一步计算道路交通节点区域内的自动驾驶可获取视距集合及其对应的防止视距失效的最大自动驾驶行驶速度,根据速度协调性评价方法计算道路交通节点路段行驶适应性。
5、进一步地,具体包括以下步骤:
6、步骤s1,获取自动驾驶视距相关信息与道路交通节点设计信息;
7、所述自动驾驶视距相关信息至少包括:自动驾驶车有效视线距离se、自动驾驶车与障碍车间相对航向角θh、激光雷达相关参数信息、自动驾驶车驾驶人接管反应时间tt、自动驾驶车预设制动减速度adp、自动驾驶系统或驾驶人接管后制动减速度ad、自动驾驶系统感知反应时间ts;
8、所述道路交通节点设计信息至少包括:道路交通节点平面线形设计信息、道路交通节点设计速度vd;
9、所述激光雷达相关参数信息至少包括:探测距离d、水平面视场角ah、垂面视场角av、水平角度分辨率δh、垂直角度分辨率δv、垂面激光线束nv、扫描频率f、安装高度hm、安装个数n、车辆探测激光点数阈值nt;
10、步骤s2,利用步骤s1获取的自动驾驶车与障碍车间相对航向角θh与激光雷达相关参数信息构建映射自动驾驶车有效视线距离se的视线数据库ω;
11、步骤s3,利用步骤s1获取的道路交通节点平面线形设计信息,进一步获取道路交通节点车道级行驶路径信息,并根据步骤s2建立的视线数据库ω,计算道路交通节点区域内的自动驾驶可获取视距sa的集合φa;
12、步骤s4,利用步骤s1获取的自动驾驶车驾驶人接管反应时间tt、自动驾驶车预设制动减速度adp、自动驾驶系统或驾驶人接管后制动减速度ad、自动驾驶系统感知反应时间ts,计算集合φa中各sa对应的防止视距失效的最大自动驾驶行驶速度vmax;
13、步骤s5,利用vmax与步骤s1获取的道路交通节点设计速度vd,根据速度协调性评价方法计算面向自动驾驶的道路交通节点路段行驶适应性k的集合ψ。
14、进一步地,步骤s2的具体过程如下:
15、步骤s21,针对获取的自动驾驶车与障碍车间相对航向角θh、激光雷达相关参数信息集合η与自动驾驶车有效视线距离se,建立视线数据链ωi,其中,激光雷达相关参数信息集合η={d,ah,av,δh,δv,nv,f,hm,n,nt};i=1,2,…,n为视线数据链序数;n∈n+为视线数据链总数;
16、步骤s22,利用建立的全部视线数据链ωi构建视线数据库ω={ωi}n。
17、进一步地,步骤s3的具体过程如下:
18、步骤s31,针对获取的道路交通节点平面线形设计信息,结合自动驾驶车对自身路径规划结果及其对障碍车路径预测结果,确定道路交通节点车道级行驶路径信息,包括路径桩号位置p与路径长度l;
19、步骤s32,根据路径桩号位置p顺序,从小到大依次作为自动驾驶车起点位置,即自动驾驶可获取视距sa检验起始位置;
20、步骤s33,根据道路交通节点平面线形设计信息,确定道路交通节点形式,进一步确定自动驾驶车与障碍车冲突点位置及其参与路段,计算参与路段相交角度θr;冲突点参与路段包括自动驾驶可获取视距sa检验起始位置所在路段rs1与预期的自动驾驶可获取视距sa检验终止位置所在路段rs2;
21、步骤s34,输入路段相交角度θr与待评价自动驾驶车的激光雷达相关参数信息集合ηe至视线数据库ω,建立输入参数组合(θr,ηe)与视线数据库ω中视线数据链ωi对应性质参数组合(θh,η)的索引,即(θr,ηe)=(θh,η),从而确定(θr,ηe)映射的自动驾驶车有效视线距离se;
22、步骤s35,根据道路交通节点平面线形设计信息与步骤s34确定的自动驾驶车有效视线距离se,确定位于路段rs1或rs2上的自动驾驶可获取视距sa检验终止位置;
23、步骤s36,根据自动驾驶可获取视距sa检验终止位置,计算从自动驾驶可获取视距sa检验起始位置经过冲突点至自动驾驶可获取视距sa检验终止位置范围内的路径长度la,该路径长度为自动驾驶车自身路径长度与障碍车路径长度之和;路径长度la作为步骤s32确定的自动驾驶可获取视距sa检验起始位置对应的自动驾驶可获取视距sa;
24、步骤s37,选取后续路径桩号位置p更新自动驾驶可获取视距sa检验起始位置,重复步骤s32-步骤s36直至p为路径桩号终点位置,最终获得路段rs1的sa集合;
25、步骤s38,更换路段rs1为道路交通节点区域内的其余路段,重复步骤s31-步骤s37,直至所有路段内的sa集合获取完毕,最终得到该道路交通节点区域内的自动驾驶可获取视距sa的集合φa。
26、进一步地,在步骤s4中,计算集合φa中各sa对应的防止视距失效的最大自动驾驶行驶速度vmax的公式为:
27、
28、式中,so为冲突点至自动驾驶可获取视距sa检验终止位置的障碍车路径长度。
29、进一步地,步骤s5的具体过程如下:
30、步骤s51,根据用户需求确定速度差阈值δv1与δv2;速度差阈值0<δv1<δv2;
31、步骤s52,当vmax≥vd时,k为“好”;vd>vmax≥(vd–δv1)时,k为“较好”;(vd–δv1)>vmax≥(vd–δv2)时,k为“中”;(vd–δv2)>vmax时,k为“差”;
32、步骤s53,计算集合φa中各sa对应的k,令其集合为ψ。
33、与现有技术相比,本发明及其优选方案具有以下有益效果:
34、(1)利用自动驾驶车与障碍车间相对航向角与激光雷达相关参数信息构建映射自动驾驶车有效视线距离的视线数据库,并计算道路交通节点区域内的自动驾驶可获取视距集合,能够令本发明公开的技术方案适用于任意道路交通节点类型的路段,突破了现有技术方案仅适用于特定类型道路交通节点的局限性;
35、(2)能够兼容现场采集的反映自动驾驶视距相关信息的实际数据或是虚拟测试数据,改善了现有技术仅利用理论推算,容易造成适应性结果较实际情况过于理想的弊端;
36、(3)所计算的防止视距失效的最大自动驾驶行驶速度能够为道路交通节点路段限速方案的制定提供理论依据,弥补了现有技术仅针对自动驾驶车感知范围进行规定,难以从道路交通管理角度提出方便应用的管理措施的不足。
- 还没有人留言评论。精彩留言会获得点赞!