城市交通智能控制系统的制作方法
本发明涉及城市交通控制,具体涉及城市交通智能控制系统。
背景技术:
1、目前车辆交通指挥灯在对十字路口中两条道路上的车辆通行进行控制时,多采用定时控制的方式,即车辆交通指挥灯的红、绿等具有固定的周期和显示顺序,这样的控制方式存在一些问题,比如第一条道路上较近的直行车辆、左转车辆已经通过路口,但第二条道路上的直行绿灯迟迟不能亮起,须等待到达设定时长才会亮起,造成车辆通行效率不佳,严重时还会造成拥堵,给生产生活工作带来一定的麻烦。上述问题亟待解决,为此,提出城市交通智能控制系统。
技术实现思路
1、本发明所要解决的技术问题在于:如何解决现有的十字路口处车辆交通指挥灯采用定时控制方式存在的车辆通行效率不佳,严重时还会造成拥堵,给生产生活工作带来一定的麻烦的问题,提供了城市交通智能控制系统。
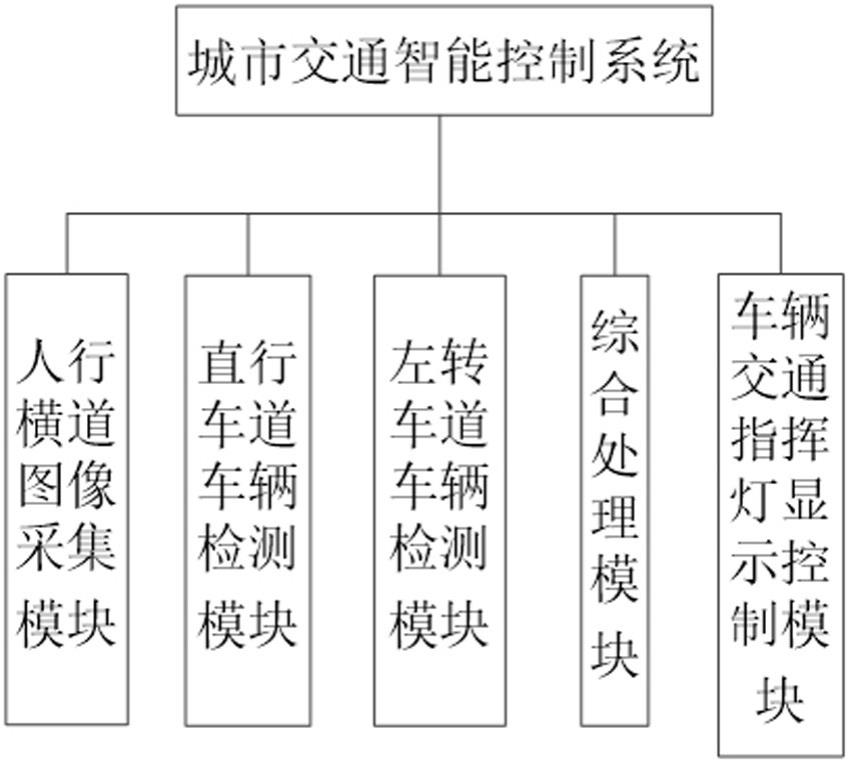
2、本发明是通过以下技术方案解决上述技术问题的,本发明包括人行横道图像采集模块、直行车道车辆检测模块、左转车道车辆检测模块、综合处理模块、车辆交通指挥灯显示控制模块;
3、所述人行横道图像采集模块,用于采集人行横道处的俯拍图像,即人行横道图像,并对人行横道图像进行预处理,获取预处理后的人行横道图像;
4、所述直行车道车辆检测模块,用于在第一条道路上车辆交通指挥灯中直行灯亮起绿灯后t1时刻及亮起绿灯后t2时刻,检测第一条道路中直行车道上离红外测距仪最近的车辆的两个时刻的距离值,并基于这两个距离值计算该车辆的速度数据,其中,t2>t1,单位为s;
5、所述左转车道车辆检测模块,用于在第一条道路上车辆交通指挥灯中左转灯亮起绿灯后t3时刻及亮起绿灯后t4时刻,检测第一条道路中左转车道上离红外测距仪最近的车辆的两个时刻的距离值,并基于这两个距离值计算该车辆的速度数据,其中,t4>t3,单位为s;
6、所述综合处理模块,用于根据第二距离数据sl2、速度数据vs1获取第一分析结果;并用于根据第四距离数据zl2、速度数据vz1获取第二分析结果;还用于根据人行横道图像获取第三分析结果;最后将各分析结果发送至车辆交通指挥灯显示控制模块中;
7、所述车辆交通指挥灯显示控制模块,用于根据第一分析结果、第二分析结果、第三分析结果对车辆交通指挥灯进行显示控制。
8、更进一步地,所述人行横道图像采集模块包括图像获取单元、图像预处理单元;所述图像获取单元用于通过工业相机获取人行横道处的俯拍图像,即人行横道图像,并将人行横道图像发送图像预处理单元;所述图像预处理单元用于对人行横道图像进行降噪及增强处理,得到降噪及增强处理后的人行横道图像,并将降噪及增强处理后的人行横道图像发送至所述综合处理模块中;所述工业相机设置在人行横道上方,其在人行横道上的投影位于人行横道区域的中心位置。
9、更进一步地,所述直行车道车辆检测模块包括第一测距单元、第一速度计算单元;所述第一测距单元用于在第一条道路上车辆交通指挥灯中直行灯亮起绿灯后t1时刻及亮起绿灯后t2时刻,通过红外测距仪对第一条道路中直行车道上离红外测距仪最近的车辆的距离进行检测,获取第一条道路中直行车道上离红外测距仪最近的车辆的第一距离数据sl1、第二距离数据sl2,其中,第一距离数据为第一条道路上车辆交通指挥灯中直行灯亮起绿灯后t1时刻的距离数据,第二距离数据为第二条道路上车辆交通指挥灯中直行灯亮起绿灯后t2时刻的距离数据,并将第一距离数据sl1、第二距离数据sl2发送至所述第一速度计算单元中,同时将第二距离数据sl2发送至综合处理模块中;所述第一速度计算单元用于根据第一距离数据sl1、第二距离数据sl2计算第一条道路中直行车道上离红外测距仪最近的车辆的速度数据,并将该速度数据发送至所述综合处理模块中;所述第一速度计算单元的计算公式如下:
10、vs1=(sl1-sl2)/ts
11、其中,vs1为第一条道路中直行车道上离红外测距仪最近的车辆的速度数据,ts为第一距离数据sl1、第二距离数据sl2的检测时间间隔。
12、更进一步地,所述左转车道车辆检测模块包括第二测距单元、第二速度计算单元;所述第二测距单元用于在第一条道路上车辆交通指挥灯中左转灯亮起绿灯后t3时刻及亮起绿灯后t4时刻,通过红外测距仪对第一条道路中左转车道上离红外测距仪最近的车辆的距离进行检测,获取第一条道路中左转车道上离红外测距仪最近的车辆的第三距离数据zl1、第四距离数据zl2,其中,第一距离数据为第一条道路上车辆交通指挥灯中左转灯亮起绿灯后t3时刻的距离数据,第二距离数据为第一条道路上车辆交通指挥灯中左转灯亮起绿灯后t4时刻的距离数据,并将第三距离数据zl1、第四距离数据zl2发送至所述第二速度计算单元中,同时将第四距离数据zl2发送至综合处理模块中;所述第二速度计算单元用于根据第三距离数据zl1、第四距离数据zl2计算第一条道路中左转车道上离红外测距仪最近的车辆的速度数据,并将该速度数据发送至所述综合处理模块中;所述第二速度计算单元的计算公式如下:
13、vz1=(zl1-zl2)/tz
14、其中,vz1为第一条道路中左转车道上离红外测距仪最近的车辆的速度数据,tz为第一距离数据zl1、第二距离数据zl2的检测时间间隔。
15、更进一步地,所述综合处理模块包括图像处理单元、第一信号灯分析单元、第二信号灯分析单元;所述图像处理单元用于对预处理后的人行横道图像进行目标识别工作,获取人行横道上行人的位置信息,并将人行横道上行人的位置信息发送至第二信号灯分析单元中;所述第一信号灯分析单元用于根据第二距离数据sl2、速度数据vs1,分析第一条道路的车辆交通指挥灯中直行灯是否需要亮起红灯,第一条道路上车辆交通指挥灯中左转灯是否需要亮起绿灯,获取第一分析结果;并用于根据第四距离数据zl2、速度数据vz1,分析第一条道路的车辆交通指挥灯中左转灯是否需要亮起红灯,同时第二条道路上车辆交通指挥灯中直行灯是否需要亮起绿灯,获取第二分析结果,将第一分析结果、第二分析结果发送至所述车辆交通指挥灯显示控制模块中;所述第二信号灯分析单元用于根据人行横道上行人的位置信息,分析直行灯为绿灯的该条道路上的右转灯是否需要亮起绿灯,获取第三分析结果,并将第三分析结果发送至车辆交通指挥灯显示控制模块中。
16、更进一步地,所述图像处理单元的具体处理过程如下:
17、s101:利用经过训练的第一目标识别模型,识别预处理后的人行横道图像的各行人头部目标,获取行人头部的目标检测框,得到各行人头部目标检测框在图像坐标系中的坐标位置;
18、s102:根据各行人头部目标检测框在图像坐标系中的坐标位置,计算得到各行人头部目标检测框的中心点在图像坐标系中的坐标位置xn,其中n表示第n个行人头部目标检测框的中心点,即人行横道上各行人的位置信息。
19、更进一步地,在所述第一信号灯分析单元中,获取第一分析结果的具体过程如下:
20、s201:将第二距离数据sl2与预设的距离阈值sy进行作差比较,同时将速度数据vs1与预设的速度阈值vsy进行作差比较;
21、s202:当第二距离数据sl2大于等于预设的距离阈值sy,且速度数据vs1小于等于预设的速度阈值vsy时,则得到第一条道路的车辆交通指挥灯中直行灯需要亮起红灯,第一条道路上车辆交通指挥灯中左转灯需要亮起绿灯,当第二距离数据sl2小于预设的距离阈值sy或速度数据vs1大于预设的速度阈值vsy时,则得到第一条道路的车辆交通指挥灯中直行灯不需要亮起红灯,保持绿灯通行状态,第一条道路上车辆交通指挥灯中左转灯不需要亮起绿灯,保持红灯禁止通行状态,即第一分析结果;
22、s203:将步骤s202中的第一分析结果发送至车辆交通指挥灯显示控制模块中。
23、更进一步地,在所述第二信号灯分析单元中,获取第二分析结果的具体过程如下:
24、s211:将第四距离数据zl2与预设的距离阈值zy进行作差比较,同时将速度数据vz1与预设的速度阈值vzy进行作差比较;
25、s212:当第四距离数据zl2大于等于预设的距离阈值zy,且速度数据vz1小于等于预设的速度阈值vzy时,则得到第一条道路的车辆交通指挥灯中左转灯需要亮起红灯,第二条道路上车辆交通指挥灯中直行灯需要亮起绿灯,当第四距离数据zl2小于预设的距离阈值zy或速度数据vz1大于预设的速度阈值vzy时,则得到第一条道路的车辆交通指挥灯中左转灯不需要亮起红灯,保持绿灯通行状态,第二条道路上车辆交通指挥灯中直行灯不需要亮起绿灯,保持红灯禁止通行状态,即第二分析结果;
26、s213:将步骤s212中的第二分析结果发送至车辆交通指挥灯显示控制模块中。
27、更进一步地,所述第二信号灯分析单元的具体处理过程如下:根据各行人头部目标检测框的中心点在图像坐标系中的坐标位置xn与图像坐标系中心点o的像素距离差值cn,与预设的像素距离差值的阈值cy进行比较,当cn均大于等于cy时,表示当前各行人均已通过人行横道或未进入人行横道,即得到第三分析结果,并将第三分析结果发送至车辆交通指挥灯显示控制模块中。
28、更进一步地,当通过第一分析结果得到第一条道路的车辆交通指挥灯中直行灯需要亮起红灯,第一条道路上车辆交通指挥灯中左转灯需要亮起绿灯,则将第一条道路的车辆交通指挥灯中直行灯亮起红灯,然后将第一条道路上车辆交通指挥灯中左转灯亮起绿灯,否则保持第一条道路的车辆交通指挥灯中直行灯的绿灯通行状态,同时保持第一条道路上车辆交通指挥灯中左转灯的红灯禁止通行状态;当通过第二分析结果得到第一条道路的车辆交通指挥灯中左转灯需要亮起红灯,第二条道路上车辆交通指挥灯中直行灯需要亮起绿灯,则将第一条道路的车辆交通指挥灯中左转灯亮起红灯,然后将第二条道路上车辆交通指挥灯中直行灯亮起绿灯,否则保持第一条道路的车辆交通指挥灯中左转灯的绿灯通行状态,同时保持第二条道路上车辆交通指挥灯中直行灯的红灯禁止通行状态;当通过第三分析结果得到当前各行人均已通过人行横道或未进入人行横道,则将对应道路上的右转灯亮起绿灯,否则保持对应侧右转灯的红灯禁止通行状态。
29、本发明相比现有技术具有以下优点:该城市交通智能控制系统,通过设置的直行车道车辆检测模块、左转车道车辆检测模块、综合处理模块,能够方便地对车辆的距离及速度进行检测或计算,获取直行车道/左转车道上离红外测距仪最近的车辆的距离及速度,根据预设的阈值进行比较分析,并根据比较分析结果控制车辆交通指挥灯的显示,无须等待固定的时长,当符合显示对应颜色的交通指挥灯的场景后即显示对应颜色的交通指挥灯,同时右转车辆右转过程中不会对对应侧人行横道上的行人造成危险,在保证车辆正常通行的基础上,也保证了行人的安全。
- 还没有人留言评论。精彩留言会获得点赞!