一种基于球面菱形离散格网的多层级空域规划方法与流程
本发明涉及一种多层级空域规划方法,特别是一种基于球面菱形离散格网的多层级空域规划方法。
背景技术:
1、当前对于空域管理系统中的空域表征模型的研究主要是从等经纬度格网模型出发探索的,而对于正多面体格网模型的研究仍然存在欠缺和不足。空域格网的划设需求有独特的形状、精度和编码方式要求,主流的四种剖分方案各有其优缺点。传统空域管理系统采用等经纬网格作为表征系统,但等经纬度格网和变经纬度格网的缺陷是高低纬度地区的格网面积形变较大,且在两极处会从矩形退化为三角形,不符合空域表征需求。自适应格网虽然灵活性强,但是格网形状不规则,很难进行递归剖分和编码,在计算上会造成极大的困难,同样不适用于空域表征。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种基于球面菱形离散格网的多层级空域规划方法。
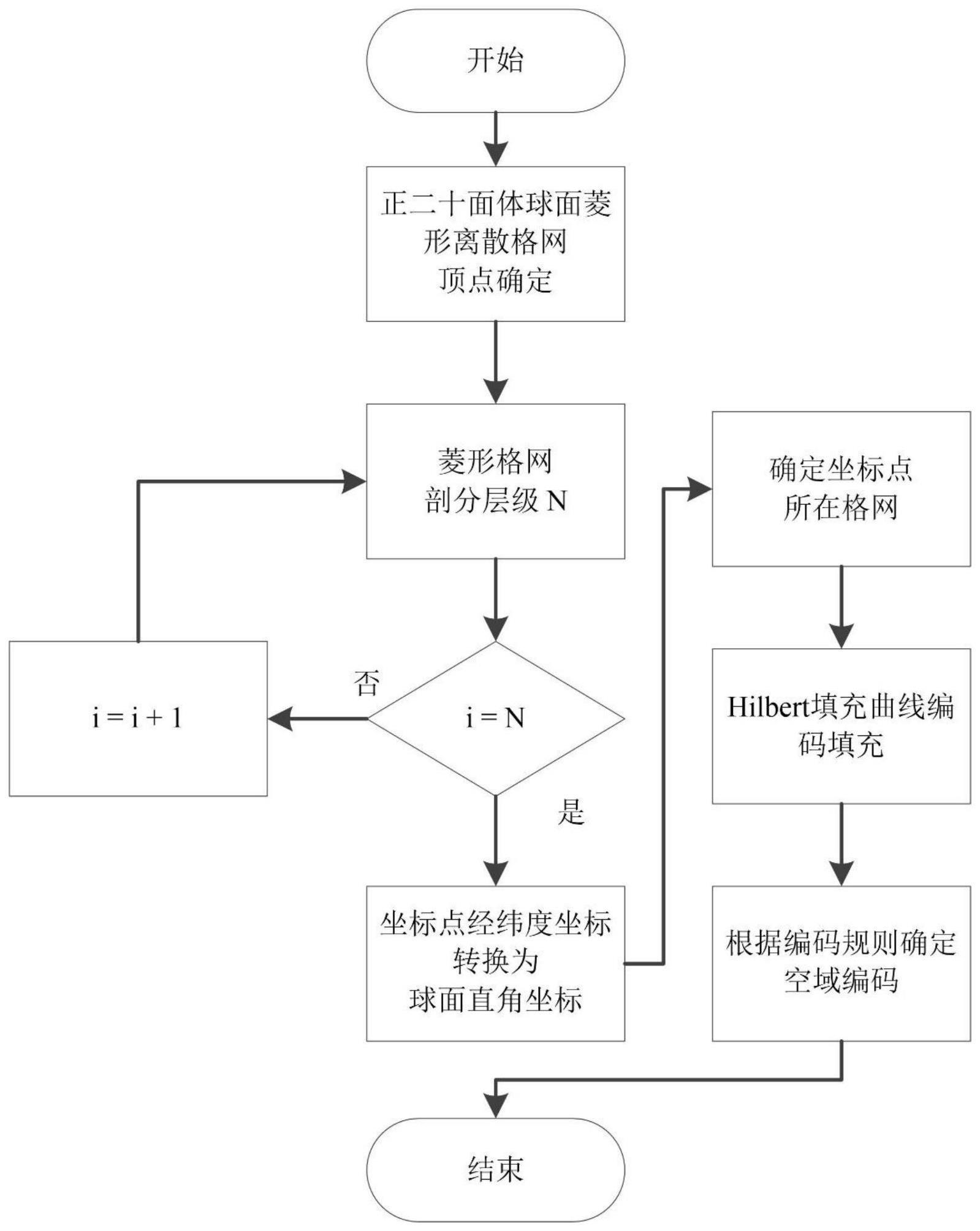
2、为了解决上述技术问题,本发明公开了一种基于球面菱形离散格网的多层级空域规划方法,包括以下步骤:
3、步骤1、在空域管理系统中,根据球面经纬度坐标系,结合正二十面体球面菱形离散格网,进行空域坐标信息由等经纬度坐标系向球面直角坐标系转换,具体包括:
4、步骤1-1,建立坐标转换函数,具体包括:
5、经纬度坐标与球面直角坐标转换公式和球面直角坐标向经纬度坐标转换公式,其中,经纬度坐标与球面直角坐标转换公式如下:
6、
7、
8、
9、其中,经纬度坐标为λ为经度,为纬度,地球赤道半径为r,对应的球面直角坐标为c(x,y,z);
10、除南北两极点外,球面直角坐标向经纬度坐标转换公式如下:
11、
12、
13、当x>0,y>0时,λ为东经,λ=α,
14、当x<0,y>0时,λ为东经,λ=α+90°,
15、当x>0,y<0时,λ为西经,λ=α,
16、当x<0,y<0时,λ为西经,λ=α+90°,
17、当z>0时,为北纬,
18、当z<0时,为南纬,
19、其中,α和β为中间变量。
20、步骤1-2,确定坐标点位置,即菱形格网剖分中点确定方式如下:
21、步骤1-2-1,计算格边中点:
22、设o为地球球心,地球半径为r,点a和点b分别为菱形单元一条边的两个顶点,点a的经纬度坐标为球面直角坐标为(x1,y1,z1),点b的经纬度坐标为球面直角坐标为(x2,y2,z2);弧为菱形单元的一条格边,m为弧的中点,c为ab点连线的中点,则由球面大圆弧剖分得点c球面直角坐标:
23、
24、由三角函数关系得点c极坐标:
25、
26、令:
27、
28、
29、
30、由此得到点m的球面直角坐标为:
31、
32、其中,λ、和r为中间变量;
33、步骤1-2-2,计算菱形格网边长:
34、点a和点b分别为菱形单元一条边的两个顶点,点a的经纬度坐标为点b的经纬度坐标为则弧的长度l的计算方法如下:
35、
36、其中,的长度l即为菱形格网边长。
37、步骤2、进行正二十面体菱形格网剖分,具体包括:
38、步骤2-1,设计正二十面体菱形格网剖分规则,即通过计算确定剖分层级和边界点坐标及菱形格网边长,得到各层级格网尺度对应关系,具体方法包括:
39、初始的10个菱形为第0层级,根据球面弧长计算得到,单个菱形边线的长度约为7061km,剖分至第10层级时,单个菱形边线的长度约为7km,不相邻菱形格网的最小距离为一个菱形格网间隔,即菱形顶点到对边的垂直距离约为6km;冲突检测时,空域外扩一层,即间隔两个包围层,最小距离11.94km,大于10km;
40、得到所述正二十面体菱形格网剖分层级为10层。
41、步骤2-2,确定坐标点所在格网,具体方法包括:
42、已菱形格网的知边界点p1,p2,p3,p4的三维坐标和待求点p三维坐标,球心为o点;连接菱形格网对边中点,得到中点坐标m1,m2,m3,m4;由此将菱形格网划分为四个象限,求平面om1m3法向量和平面om2m4法向量根据点与平面关系来确定点所处象限;对1-10层级的菱形格网进行四叉树剖分,通过法向量方法来确定p点在菱形格网的哪一象限,最终确定p点的格网位置。
43、步骤3、建立空域坐标全球编码系统,对空域坐标点进行全球定位编码,完成基于球面菱形离散格网的多层级空域规划,具体方法包括:
44、步骤3-1,采用空间填充曲线进行填充,即通过构造多层级hilbert曲线,使得空域格网在每一剖分层级下,低层级曲线都由高层级曲线经过相应规则的平移或旋转而形成;
45、连接菱形格网对边中点得到四个子菱形,设四个子菱形分别为四个象限,用hilbert曲线填充象限,分别设为四种状态;根据初始菱形格网的hilbert编码和状态转移方式,推导出子菱形的hilbert编码和状态转移方式。
46、步骤3-2,对目标点进行空域编码,具体方法包括:
47、目标点的编码表示方式由如下部分组成:
48、第一部分,菱形码:剖分的第0层级;
49、第二部分,区位码:剖分的第1-3层级;格网四叉树剖分,由hilbert曲线实现格网空间的填充,将二进制编码转化为hilbert码;
50、第三部分,坐标码:剖分的第4-10层级;格网四叉树剖分,由hilbert曲线实现格网空间的填充,将二进制编码转化为hilbert码,再把hilbert码转化为平面坐标。
51、步骤4、在空域管理系统中,依据步骤3中所述的全球定位编码,对所管辖空域内的飞行器进行管理。
52、有益效果:
53、本发明根据空域划设实际,结合球面菱形离散格网在全球表征中能够实现不同纬度下形变最小,建立基于正二十面体球面菱形格网的全球空域表征模型。通过本发明提供的方法,可以有效解决传统空域管理系统中空域模型在格网表征中存在的面积表征不一致,进而导致飞行间隔不一致,最终影响飞行安全的问题。
技术特征:
1.一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤1中所述的进行空域坐标信息由等经纬度坐标系向球面直角坐标系转换,具体包括:
3.根据权利要求2所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤1-1中所述的建立坐标转换函数,具体包括:
4.根据权利要求3所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤1-2所述的确定坐标点位置,即菱形格网剖分中点确定方式如下:
5.根据权利要求4所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤2所述的进行正二十面体菱形格网剖分,具体包括:
6.根据权利要求5所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤2-1所述的设计正二十面体菱形格网剖分规则,即通过计算确定剖分层级和边界点坐标及菱形格网边长,得到各层级格网尺度对应关系,具体方法包括:
7.根据权利要求6所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤2-2所述的确定坐标点所在格网,具体方法包括:
8.根据权利要求7所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤3所述的对空域坐标点进行全球定位编码,具体方法包括:
9.根据权利要求8所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤3-1所述的采用空间填充曲线进行填充,即通过构造多层级hilbert曲线,使得空域格网在每一剖分层级下,低层级曲线都由高层级曲线经过相应规则的平移或旋转而形成;
10.根据权利要求9所述的一种基于球面菱形离散格网的多层级空域规划方法,其特征在于,步骤3-2所述的对目标点进行空域编码,具体方法包括:
技术总结
本发明公开了一种基于球面菱形离散格网的多层级空域规划方法,包括以下步骤:步骤1、在空域管理系统中,根据球面经纬度坐标系,结合正二十面体球面菱形离散格网,进行空域坐标信息由等经纬度坐标系向球面直角坐标系转换;步骤2、进行正二十面体菱形格网剖分;步骤3、建立空域坐标全球编码系统,对空域坐标点进行全球定位编码,完成基于球面菱形离散格网的多层级空域规划;步骤4、在空域管理系统中,依据步骤3中所述的全球定位编码,对所管辖空域内的飞行器进行管理。本方法可以有效解决空域模型在格网表征中存在的面积表征不一致,进而导致飞行间隔不一致,最终影响飞行安全的问题。
技术研发人员:曲凯,赵顾颢,毛少杰,张阳,董斌,张明伟,丁辉,童明,徐珂
受保护的技术使用者:中国电子科技集团公司第二十八研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!