一种卡口监测点的联动追踪方法及装置与流程
本发明涉及船舶监测,尤其涉及一种卡口监测点的联动追踪方法及装置。
背景技术:
1、当前,对船舶进行追踪时一般采用卫星ais技术(即,船舶定位技术),具体方式为:通过低轨道的卫星接收船舶发送的ais报文信息,卫星将接收和解码ais报文信息转发给相应的地球站,从而让陆地管理机构掌握船舶的相关动态信息,实现对航行船舶的追踪。
2、然而,在实际生活中,船舶向卫星发送ais信号,和/或,卫星将解码的信号发送至相应的地球站时,存在多种阻碍信号发送的影响因素,比如:船舶所在的航行水域中的磁场干扰、航行水域的信号质量等。若ais信号受到磁场干扰发生信号变化,和/或,若航行水域中信号质量差致使ais信号不能及时进行发送和接收,都容易导致对船舶航行时的追踪准确性低。可见,提出一种如何提高对船舶航行的追踪准确性的技术方案显得尤为重要。
技术实现思路
1、本发明提供了一种卡口监测点的联动追踪方法及装置,能够提高目标船舶的联动追踪准确性,从而有利于提高管理机构对目标船舶航行时的追踪结果的管控准确性。
2、为了解决上述技术问题,本发明第一方面公开了一种卡口监测点的联动追踪方法,所述方法包括:
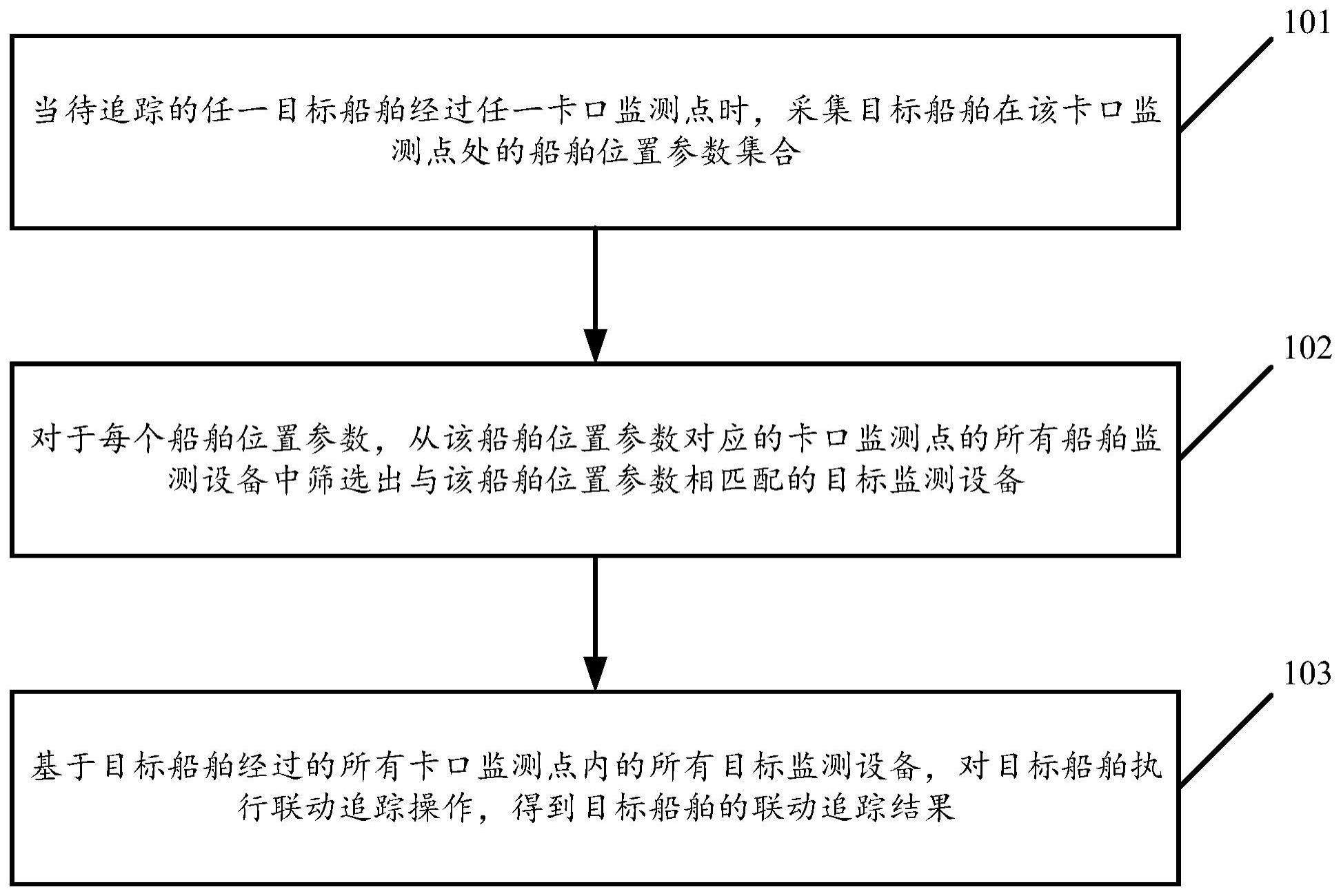
3、当待追踪的任一目标船舶经过任一卡口监测点时,采集所述目标船舶在该卡口监测点处的船舶位置参数集合,所述船舶位置参数集合包括所述目标船舶在相应卡口监测点处的航道中的多个船舶位置参数;
4、对于每个所述船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备;
5、基于所述目标船舶经过的所有所述卡口监测点内的所有所述目标监测设备,对所述目标船舶执行联动追踪操作,得到所述目标船舶的联动追踪结果。
6、作为一种可选的实施方式,在本发明第一方面中,所述对于每个所述船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备,包括:
7、对于每个所述船舶位置参数,获取该船舶位置参数对应的卡口监测点的所有船舶监测设备中的每个所述船舶监测设备的设备位置参数;
8、对于每个所述船舶位置参数,根据该船舶位置参数与相应卡口监测点处的每个所述船舶监测设备的设备位置参数,计算每个所述船舶监测设备对所述目标船舶的监测距离;
9、对于每个所述船舶位置参数,从相应卡口监测点处的所有所述船舶监测设备中筛选出对所述目标船舶的监测距离小于或等于预设距离的至少一个船舶监测设备,作为与该船舶位置参数相匹配的目标监测设备。
10、作为一种可选的实施方式,在本发明第一方面中,在所述采集所述目标船舶在该卡口监测点处的船舶位置参数集合之后,以及在所述对于每个所述船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备之前,所述方法还包括:
11、对于每个所述船舶位置参数,获取该船舶位置参数对应的卡口监测点的所有船舶监测设备中的每个所述船舶监测设备针对所述目标船舶的监测数据,得到每个所述船舶监测设备对应的船舶监测数据;
12、根据每个所述船舶监测设备对应的船舶监测数据,确定每个所述船舶监测设备针对所述目标船舶船体的监测完整度,得到每个所述船舶监测设备对应的船体监测完整度;
13、根据所有所述船舶监测设备对应的船体监测完整度,从所有所述船舶监测设备中筛选出满足预设设备筛选条件的所有船舶监测设备,作为该船舶位置参数对应的备选监测设备,并触发执行所述的对于每个所述船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备的操作,其中,该操作中的船舶监测设备为所述备选监测设备。
14、作为一种可选的实施方式,在本发明第一方面中,所述船舶监测数据包括所述目标船舶的船舶影像数据;
15、以及,所述根据每个所述船舶监测设备对应的船舶监测数据,确定每个所述船舶监测设备针对所述目标船舶船体的监测完整度,得到每个所述船舶监测设备对应的船体监测完整度,包括:
16、对于每个所述船舶监测设备,根据该船舶监测设备的船舶监测数据包含的所述目标船舶的船舶影像数据,确定所述目标船舶的船舶类型以及所述目标船舶的船体数据;
17、根据所述目标船舶的船舶类型,从预设的船舶船体数据库中筛选出与所述目标船舶的船舶类型相匹配的标准船体数据;
18、根据所述目标船舶的船体数据与所述标准船体数据,计算所述目标船舶的船体的完整度,作为该船舶监测设备对应的船体监测完整度。
19、作为一种可选的实施方式,在本发明第一方面中,所述根据所有所述船舶监测设备对应的船体监测完整度,从所有所述船舶监测设备中筛选出满足预设设备筛选条件的所有船舶监测设备,作为该船舶位置参数对应的备选监测设备,包括:
20、根据所有所述船舶监测设备对应的船体监测完整度,从所有所述船舶监测设备中筛选出所述对应的船体监测完整度大于或等于预设完整度的所有船舶监测设备,作为该船舶位置参数对应的备选监测设备;或者,
21、根据所有所述船舶监测设备中的至少两个所述船舶监测设备对应的船体监测完整度进行组合,得到多个船体监测组合结果;并从所有所述船体监测组合结果中筛选出满足预设组合结果的船体监测组合结果,作为目标组合结果;以及将所述目标组合结果对应的所有船舶监测设备确定为该船舶位置参数对应的备选监测设备,每个所述船体监测组合结果用于表示所述目标船舶在相应船舶监测设备中的船体完整度。
22、作为一种可选的实施方式,在本发明第一方面中,每个所述目标监测设备对应的船舶监测数据均存在对应的监测时间;
23、以及,所述基于所述目标船舶经过的所有所述卡口监测点内的所有所述目标监测设备,对所述目标船舶执行联动追踪操作,得到所述目标船舶的联动追踪结果,包括:
24、对于每个所述卡口监测点的每个所述目标监测设备,对该目标监测设备对应的船舶监测数据中包含的所述目标船舶的船舶影像数据进行分析,得到该目标监测设备针对所述目标船舶的船舶参数,所述船舶参数包括所述目标船舶的船舶标识、所述目标船舶的船舶部位、所述目标船舶的船舶朝向、所述目标船舶的海拔高度中的一种或多种的组合,其中,当所述船舶参数包括所述目标船舶的船舶部位时,所述船舶参数还包括所述船舶部位的面积和/或所述船舶部位的体积;
25、根据所有所述目标监测设备针对所述目标船舶的船舶参数以及所有所述船舶监测数据对应的监测时间,确定所述目标船舶的船舶航行参数,所述目标船舶的船舶航行参数包括所述目标船舶的航行速度、所述目标船舶的航行方向以及所述目标船舶的航行路线中的一种或多种的组合;
26、所述目标船舶的联动追踪结果用于表示所述目标船舶在不同监测时间和/或不同船舶位置参数的船舶航行参数的结果。
27、作为一种可选的实施方式,在本发明第一方面中,在所述对所有所述卡口监测点的所有所述目标监测设备进行针对所述目标船舶的联动追踪,得到所述目标船舶的联动追踪结果之后,所述方法还包括:
28、获取所述目标船舶所在航行水域中的标准航行参数;
29、计算所述目标船舶的船舶航行参数与所述标准航行参数之间的差异度;
30、判断所述目标船舶的船舶航行参数与所述标准航行参数之间的差异度是否小于或等于预设差异度;
31、若判断出所述目标船舶的船舶航行参数与所述标准航行参数之间的差异度小于或等于所述预设差异度,则确定所述目标船舶的船舶航行参数正常;
32、若判断出所述目标船舶的船舶航行参数与所述标准航行参数之间的差异度大于所述预设差异度,则确定所述目标船舶的船舶航行参数异常,并生成所述目标船舶对应的行为异常提示,所述行为异常提示用于提示所述目标船舶存在航行行为异常的问题。
33、本发明第二方面公开了一种卡口监测点的联动追踪装置,所述装置包括:
34、采集模块,用于当待追踪的任一目标船舶经过任一卡口监测点时,采集所述目标船舶在该卡口监测点处的船舶位置参数集合,所述船舶位置参数集合包括所述目标船舶在相应卡口监测点处的航道中的多个船舶位置参数;
35、筛选模块,用于对于每个所述船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备;
36、联动模块,用于基于所述目标船舶经过的所有所述卡口监测点内的所有所述目标监测设备,对所述目标船舶执行联动追踪操作,得到所述目标船舶的联动追踪结果。
37、作为一种可选的实施方式,在本发明第二方面中,所述筛选模块对于每个所述船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备的方式具体包括:
38、对于每个所述船舶位置参数,获取该船舶位置参数对应的卡口监测点的所有船舶监测设备中的每个所述船舶监测设备的设备位置参数;
39、对于每个所述船舶位置参数,根据该船舶位置参数与相应卡口监测点处的每个所述船舶监测设备的设备位置参数,计算每个所述船舶监测设备对所述目标船舶的监测距离;
40、对于每个所述船舶位置参数,从相应卡口监测点处的所有所述船舶监测设备中筛选出对所述目标船舶的监测距离小于或等于预设距离的至少一个船舶监测设备,作为与该船舶位置参数相匹配的目标监测设备。
41、作为一种可选的实施方式,在本发明第二方面中,所述装置还包括:
42、获取模块,用于在所述采集模块采集所述目标船舶在该卡口监测点处的船舶位置参数集合之后,以及在所述筛选模块对于每个所述船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备之前,获取该船舶位置参数对应的卡口监测点的所有船舶监测设备中的每个所述船舶监测设备针对所述目标船舶的监测数据,得到每个所述船舶监测设备对应的船舶监测数据;
43、确定模块,用于根据每个所述船舶监测设备对应的船舶监测数据,确定每个所述船舶监测设备针对所述目标船舶船体的监测完整度,得到每个所述船舶监测设备对应的船体监测完整度;
44、所述筛选模块,还用于根据所有所述船舶监测设备对应的船体监测完整度,从所有所述船舶监测设备中筛选出满足预设设备筛选条件的所有船舶监测设备,作为该船舶位置参数对应的备选监测设备,并触发所述筛选模块执行所述的对于每个所述船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备的操作,其中,该操作中的船舶监测设备为所述备选监测设备。
45、作为一种可选的实施方式,在本发明第二方面中,所述船舶监测数据包括所述目标船舶的船舶影像数据;
46、以及,所述确定模块根据每个所述船舶监测设备对应的船舶监测数据,确定每个所述船舶监测设备针对所述目标船舶船体的监测完整度,得到每个所述船舶监测设备对应的船体监测完整度的方式具体包括:
47、对于每个所述船舶监测设备,根据该船舶监测设备的船舶监测数据包含的所述目标船舶的船舶影像数据,确定所述目标船舶的船舶类型以及所述目标船舶的船体数据;
48、根据所述目标船舶的船舶类型,从预设的船舶船体数据库中筛选出与所述目标船舶的船舶类型相匹配的标准船体数据;
49、根据所述目标船舶的船体数据与所述标准船体数据,计算所述目标船舶的船体的完整度,作为该船舶监测设备对应的船体监测完整度。
50、作为一种可选的实施方式,在本发明第二方面中,所述筛选模块根据所有所述船舶监测设备对应的船体监测完整度,从所有所述船舶监测设备中筛选出满足预设设备筛选条件的所有船舶监测设备,作为该船舶位置参数对应的备选监测设备的方式具体包括:
51、根据所有所述船舶监测设备对应的船体监测完整度,从所有所述船舶监测设备中筛选出所述对应的船体监测完整度大于或等于预设完整度的所有船舶监测设备,作为该船舶位置参数对应的备选监测设备;或者,
52、根据所有所述船舶监测设备中的至少两个所述船舶监测设备对应的船体监测完整度进行组合,得到多个船体监测组合结果;并从所有所述船体监测组合结果中筛选出满足预设组合结果的船体监测组合结果,作为目标组合结果;以及将所述目标组合结果对应的所有船舶监测设备确定为该船舶位置参数对应的备选监测设备,每个所述船体监测组合结果用于表示所述目标船舶在相应船舶监测设备中的船体完整度。
53、作为一种可选的实施方式,在本发明第二方面中,每个所述目标监测设备对应的船舶监测数据均存在对应的监测时间;
54、以及,所述联动模块基于所述目标船舶经过的所有所述卡口监测点内的所有所述目标监测设备,对所述目标船舶执行联动追踪操作,得到所述目标船舶的联动追踪结果的方式具体包括:
55、对于每个所述卡口监测点的每个所述目标监测设备,对该目标监测设备对应的船舶监测数据中包含的所述目标船舶的船舶影像数据进行分析,得到该目标监测设备针对所述目标船舶的船舶参数,所述船舶参数包括所述目标船舶的船舶标识、所述目标船舶的船舶部位、所述目标船舶的船舶朝向、所述目标船舶的海拔高度中的一种或多种的组合,其中,当所述船舶参数包括所述目标船舶的船舶部位时,所述船舶参数还包括所述船舶部位的面积和/或所述船舶部位的体积;
56、根据所有所述目标监测设备针对所述目标船舶的船舶参数以及所有所述船舶监测数据对应的监测时间,确定所述目标船舶的船舶航行参数,所述目标船舶的船舶航行参数包括所述目标船舶的航行速度、所述目标船舶的航行方向以及所述目标船舶的航行路线中的一种或多种的组合;
57、所述目标船舶的联动追踪结果用于表示所述目标船舶在不同监测时间和/或不同船舶位置参数的船舶航行参数的结果。
58、作为一种可选的实施方式,在本发明第二方面中,所述获取模块,还用于在所述联动模块对所有所述卡口监测点的所有所述目标监测设备进行针对所述目标船舶的联动追踪,得到所述目标船舶的联动追踪结果之后,获取所述目标船舶所在航行水域中的标准航行参数;
59、以及,所述装置还包括:
60、计算模块,用于计算所述目标船舶的船舶航行参数与所述标准航行参数之间的差异度;
61、判断模块,用于判断所述目标船舶的船舶航行参数与所述标准航行参数之间的差异度是否小于或等于预设差异度;
62、所述确定模块,还用于若判断出所述目标船舶的船舶航行参数与所述标准航行参数之间的差异度小于或等于所述预设差异度,则确定所述目标船舶的船舶航行参数正常;
63、所述确定模块,还用于若判断出所述目标船舶的船舶航行参数与所述标准航行参数之间的差异度大于所述预设差异度,则确定所述目标船舶的船舶航行参数异常;
64、生成模块,用于生成所述目标船舶对应的行为异常提示,所述行为异常提示用于提示所述目标船舶存在航行行为异常的问题。
65、本发明第三方面公开了另一种卡口监测点的联动追踪装置,所述装置包括:
66、存储有可执行程序代码的存储器;
67、与所述存储器耦合的处理器;
68、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明第一方面公开的卡口监测点的联动追踪方法。
69、本发明第四方面公开了一种计算机存储介质,所述计算机存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明第一方面公开的卡口监测点的联动追踪方法。
70、与现有技术相比,本发明实施例具有以下有益效果:
71、本发明实施例中,当待追踪的任一目标船舶经过任一卡口监测点时,采集目标船舶在该卡口监测点处的船舶位置参数集合,船舶位置参数集合包括目标船舶在相应卡口监测点处的航道中的多个船舶位置参数;对于每个船舶位置参数,从该船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备;基于目标船舶经过的所有卡口监测点内的所有目标监测设备,对目标船舶执行联动追踪操作,得到目标船舶的联动追踪结果。可见,实施本发明能够从采集到的目标船舶的每个船舶位置参数对应的卡口监测点的所有船舶监测设备中筛选出与该船舶位置参数相匹配的目标监测设备,能够提高目标监测设备的筛选准确性,从而能够提高目标监测设备的联动准确性,并基于目标船舶经过的所有卡口监测点内的准确筛选出的所有目标监测设备,对目标船舶执行联动追踪操作,有利于提高目标船舶的联动追踪准确性和联动追踪效率,从而有利于提高管理机构对目标船舶航行时的追踪结果的管控准确性。
- 还没有人留言评论。精彩留言会获得点赞!