一种路口通行速度规划方法、计算机设备、可读存储介质及机动车与流程
本发明涉及自动驾驶,具体涉及一种行驶状态判断方法、计算机设备、可读存储介质及机动车。
背景技术:
1、道路是城市交通的命脉,随着经济高速发展,城市车辆急速增加,交通数量流量日益增长,给城市道路造成了越来越大的交通压力。十字路口、丁字路口作为车辆汇集、转向和疏散的必经之点,是城市交通的枢纽,提高十字路口的通行效率是缓解交通拥挤的一种有效途径。
2、近年来,自动驾驶辅助系统发展迅速,现有的自动驾驶框架从大体上可由感知、决策、规划和控制四大模块组成。决策作为直接与规划交互的模块,在其中担任着非常重要的角色。它能够解放驾驶员双脚,驾驶员仅需操作方向盘即可完成对车辆的操纵。然而,在自动驾驶的现有框架,对于创建高精地图,需要专业的数据采集车,具有季度的地图更新能力,并且需要耗费大量的人力物力维护高清地图,这导致了高清地图的维护成本、使用成本居高不下。
3、此外,现阶段提高路口通行速度,从基础建设角度考虑,比如改扩建道路、建设大型立交桥等方案,占地面积大,施工周期长,建设造价高,局限性和实现难度大。从感知红绿灯系统角度考虑,比如设计信号灯控制系统,布置车流数据采集装置、监控摄像头、中央处理器,根据车辆拐弯时间设置信号灯各种信号的时长。这种利用外部设备来控制信号灯的方式虽然可以提高通行效率,但是随着时间的推移,环境不断变化,仍旧需要耗费大量精力进行维护,且只能适用定制化场景。
技术实现思路
1、本发明旨在一定程度上解决相关技术中的技术问题之一。为此,本发明提供了一种路口通行速度规划方法,不依赖高精地图的高级辅助驾驶,仅通过导航地图,在不改变道路建设的负担下,有效的提高十字路口的通行效率。
2、为了达到上述目的,本发明采用如下技术方案:
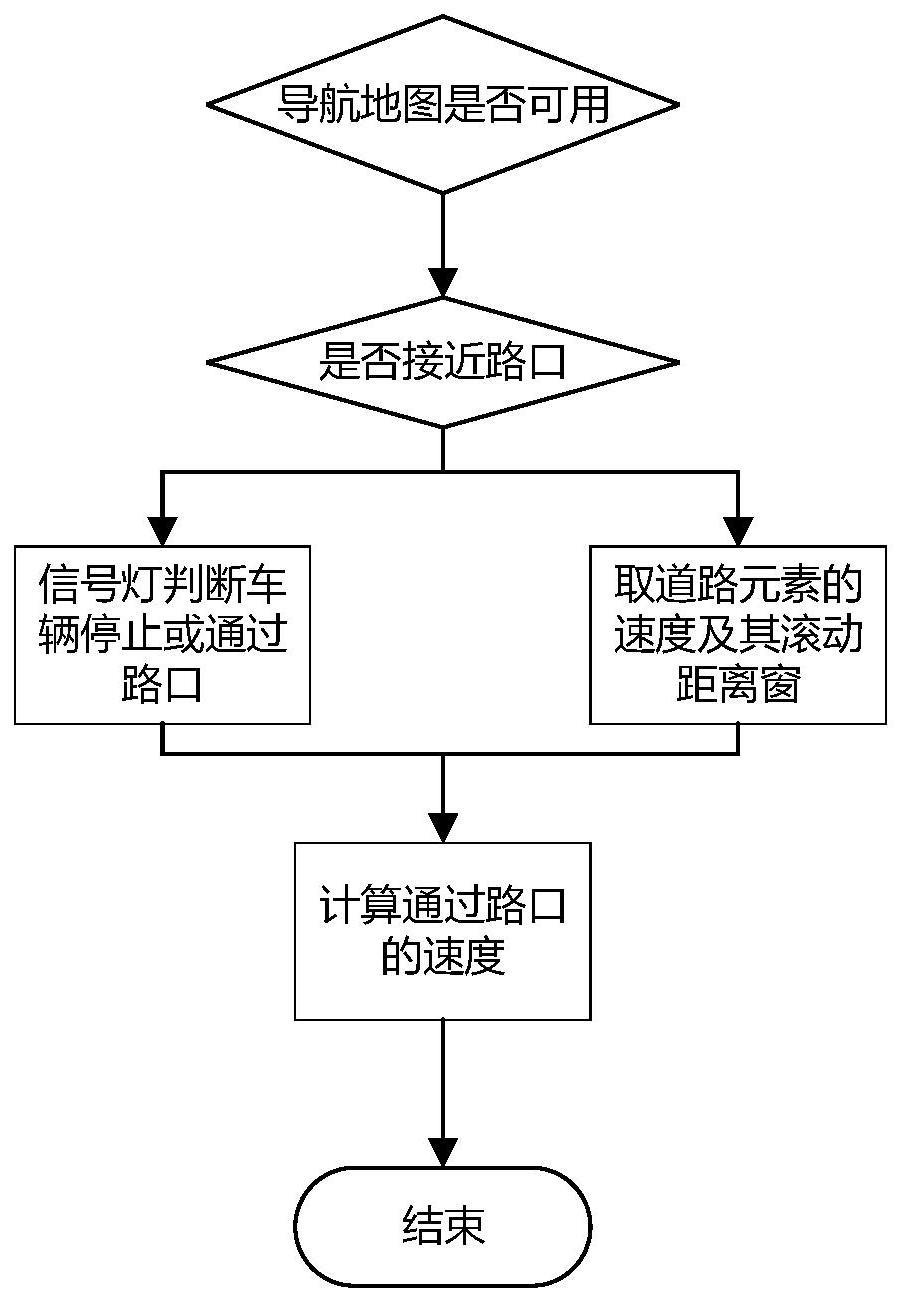
3、一种路口通行速度规划方法,包括如下步骤:
4、确定导航地图的可用性,如果可用,进行下一步,如果不可用,则结束;
5、判断车辆是否接近路口,如果接近,进行下一步,如果未接近,则结束;
6、根据信号灯判断车辆停止或通过路口,并获取道路元素的速度及其滚动距离窗;
7、根据道路元素的速度及其滚动距离窗计算通过路口的速度。
8、可选的,根据信号灯判断车辆停止或通过十字路口包括如下步骤:
9、获取信号灯的状态以及导航地图的路口转弯类型;
10、找到自车前方最近的信号灯,通过找到的信号灯以及路口车道的转向信息确认找到的信号灯为自车所关注的信号灯;
11、根据信号灯的状态判断车辆是否可以越过停止线,如果可以,通过路口,如果不可以,将停止线的位置投影在导航参考上,获得所在投影的点,并在此点上给出为0的期望速度。
12、可选的,获取道路元素的速度及其滚动距离窗包括:
13、驾驶员设置的速度及其滚动距离窗信息;
14、道路限速及其滚动距离窗信息;
15、曲率限速及其滚动距离窗信息;
16、路口范围内的速度及其滚动距离窗信息。
17、可选的,获取的道路元素的速度及其滚动距离窗以列表的形式输出。
18、可选的,曲率限速的计算公式为:
19、
20、其中,v为曲率限速,a为自车的加速度,k为自车通过路口转弯的曲率半径的倒数。
21、可选的,根据道路元素的速度及其滚动距离窗计算通过路口的速度包括如下步骤:
22、判断参与计算的数据的长度是否超过阈值,如果未超过,进行下一步,如果超过,结束;
23、将参与计算的数据插入滑动窗口队列;
24、设置步长,按照步长遍历参与计算的数据,对参与计算的数据做如下计算:
25、步长对应的速度列表计算最小速度;
26、输出步长内的期望通行速度;
27、输出所有步长集合的期望通行速度。
28、本发明所提供的技术方案,将现有技术中需要改进周围道路或者增加设备的方法,改进为根据导航地图的路口方向,从感知融合获得信号灯状态和停止线等信息,利用滑动窗动态算法融合计算自车期望的通行速度影响后续的纵向规划,不再依赖高精地图。经过精简后,使用成本得到降低,计算量得到减小,不仅使制造地图的成本降低,也提高了车辆的运行效率,减少整个系统反而负载量。
29、同时,决策算法层面进行提高十字路口的通行效率,运用车辆自身携带的传感器以及导航地图的结合进行设计,大大的提高十字路口范围内的通行效率,缓解交通阻塞
30、并且,本发明还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述的行驶状态判断方法。
31、同时,一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一项所述的行驶状态判断方法。
32、此外,本发明还提供了一种机动车,所述机动车具有导航辅助巡航功能或自动驾驶功能,所述机动车运行导航辅助巡航功能或自动驾驶功能时,由前述任意一项所述的路口通行速度规划方法规划通过路口的速度。
33、本发明的这些特点和优点将会在下面的具体实施方式以及附图中进行详细的揭露。本发明最佳的实施方式或手段将结合附图来详尽表现,但并非是对本发明技术方案的限制。另外,在每个下文和附图中出现的这些特征、要素和组件是具有多个,并且为了表示方便而标记了不同的符号或数字,但均表示相同或相似构造或功能的部件。
技术特征:
1.一种路口通行速度规划方法,其特征在于,所述路口通行速度规划方法包括如下步骤:
2.根据权利要求1所述的路口通行速度规划方法,其特征在于,根据信号灯判断车辆停止或通过十字路口包括如下步骤:
3.根据权利要求1所述的路口通行速度规划方法,其特征在于,获取道路元素的速度及其滚动距离窗包括:
4.根据权利要求3所述的路口通行速度规划方法,其特征在于,获取的道路元素的速度及其滚动距离窗以列表的形式输出。
5.根据权利要求3所述的路口通行速度规划方法,其特征在于,曲率限速的计算公式为:
6.根据权利要求4所述的路口通行速度规划方法,其特征在于,根据道路元素的速度及其滚动距离窗计算通过路口的速度包括如下步骤:
7.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任意一项所述的路口通行速度规划方法。
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任意一项所述的路口通行速度规划方法。
9.一种机动车,其特征在于,所述机动车具有导航辅助巡航功能或自动驾驶功能,所述机动车运行导航辅助巡航功能或自动驾驶功能时,由权利要求1至6中任意一项所述的路口通行速度规划方法规划通过路口的速度。
技术总结
本发明公开了一种路口通行速度规划方法、计算机设备、可读存储介质及机动车,涉及自动驾驶技术领域,包括如下步骤:确定导航地图的可用性;判断车辆是否接近路口;根据信号灯判断车辆停止或通过路口,并获取道路元素的速度及其滚动距离窗;根据道路元素的速度及其滚动距离窗计算通过路口的速度。本发明不依赖高精地图的高级辅助驾驶,仅通过导航地图,在不改变道路建设的负担下,有效的提高十字路口的通行效率。
技术研发人员:刘超
受保护的技术使用者:浙江零跑科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!