一种基于自动驾驶车辆的机非碰撞预警系统及方法
本发明属于自动驾驶领域,更具体的说涉及一种基于自动驾驶车辆的机非碰撞预警系统及方法。
背景技术:
1、与本发明最为接近的常规技术为:专利文献cn116206285a公开了一种应用于自动驾驶的交通弱势群体碰撞风险评估方法及系统,包括:识别和获取车辆周围交通弱势群体信息,获取车辆自身所处的位置速度信息,获取交通弱势群体所处的周围交通环境信息;利用获取到的交通弱势群体信息,对交通弱势群体的行驶意图进行分类和识别;基于交通弱势群体的历史多帧信息,结合交通弱势群体的行驶意图,对交通弱势群体的行驶轨迹进行预测;根据行驶目标生成备选轨迹,并将轨迹与弱势群体的预测轨迹进行碰撞检测,弱势群体根据其行驶意图扩张影响边界,计算碰撞的位置和碰撞的时间;计算弱势群体与自动驾驶车辆碰撞风险。
2、(1)该方法及系统在进行弱势群体与自动驾驶车辆的碰撞位置及其时间计算时,将能检测到的所有弱势群体均进行相关考虑,导致自动驾驶车辆芯片算力浪费。
3、(2)该方法及系统在进行弱势群体与自动驾驶车辆间碰撞风险等级划分时,仅考虑了预设群体的所在位置与碰撞发生时间,未考量其他关于可能引起碰撞风险的相关因素。
4、(3)该方法及系统在碰撞风险判断完成后,仅简单说明了在各风险等级下的相关操作,并未提到对自动驾驶车辆驾驶人的提醒措施。
5、(4)该方法及系统在对预设群体的行驶意图进行识别时,考虑重点为弱势群体自身行驶道路受到影响而侵入机动车道路的状况,未考虑正常行驶的弱势群体发生突发状况的情形,可能使得个别弱势群体碰撞风险计算结果不准确。
技术实现思路
1、针对现有常规技术自动驾驶车辆芯片算力浪费问题,本发明通过定位检测器对本车位置进行判断是否需要开启非机动车识别装置,如自动驾驶车辆行驶在在机非隔离的机动车道中,识别装置处于关闭状态,且本发明仅计算在自动驾驶车辆与非机动车间最小安全距离以内的非机动车的碰撞风险等级,进一步节省算力资源。
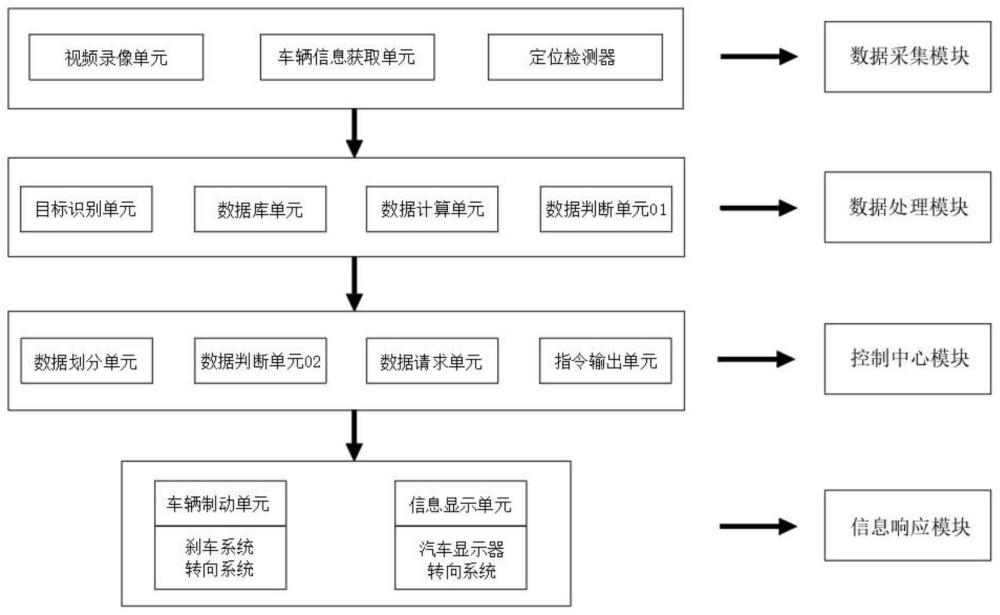
2、为了实现上述目的,本发明是采用以下技术方案实现的:所述的预警系统包括数据采集模块、数据处理模块、控制中心模块、信息通讯模块、信息响应模块;
3、所述数据采集模块、数据处理模块、控制中心模块、信息响应模块依次通过信息通讯模块连接,即所述的数据采集模块的输出端作为数据处理模块的输入端,所述的数据处理模块的输出端作为控制中心模块的输入端,所述的控制中心模块的输出端作为信息响应模块的输入端。
4、进一步地,所述的数据采集模块包括视频录像单元、车辆信息获取单元、定位检测器、数据传输端口。
5、进一步地,所述的数据处理模块包括目标识别单元、数据计算单元、数据库单元、数据判断单元、数据传输端口。
6、进一步地,所述的控制中心模块包括数据划分单元、数据判断单元、指令输出单元、数据传输端口。
7、进一步地,所述的信息通讯模块包括有线通讯和无线通讯;其中无线通讯包括蓝牙、wifi、数据网络等一种或多种形式。
8、进一步地,所述的信息响应模块包括制动单元和信息显示单元;其中制动单元包括刹车系统和转向系统;信息显示单元包括汽车显示器、汽车音响。
9、再一方面,一种基于自动驾驶车辆的机非碰撞预警方法,所述的方法适用于所述的系统,所述的方法如下:
10、s1:数据采集模块通过定位检测器获取当前车辆实时定位信息,若当前车辆行驶在交叉口以及机非混行道路等可能出现机非碰撞的交通环境时,则启动碰撞预警系统,视频录像单元对周围状况进行视频录像,车辆信息获取单元获取自动驾驶车辆速度等信息;
11、s2:数据处理模块通过信息通讯模块接收数据采集模块传输的相关信息并对其进行处理,目标识别单元对视频信息进行处理,识别视频录像中的非机动车类型,将识别出的非机动车类型与数据库单元中存储的非机动车信息进行比对,获取该类型非机动车的相关数据;
12、s3:控制中心模块通过信息通讯模块接收数据处理模块计算的非机动车与自动驾驶车辆间的冲突时间差、冲突当量速度。
13、本发明有益效果:
14、(1)本发明能够通过定位检测系统提供自动驾驶车辆的行驶环境,从而判断是否有必要开启碰撞预警系统,且在进行碰撞风险等级计算时,仅对自动驾驶车辆最小安全距离内的非机动车辆进行计算,有效避免了因无关的非机动车导致自车产生的算力资源浪费和不必要的减速行为。
15、(2)本发明在进行自动驾驶车辆与非机动车间最小安全距离计算时,充分考虑自车与非机动车的车长、车宽、行车速度、行车加速度及其速度夹角等因素,使自车能够处理各种情形下可能发生的碰撞情况,为驾驶人提供安全缓冲,提升碰撞检测机制的全面性,从而保证行车安全。
16、(3)本发明在对各非机动车与自车间的碰撞风险等级进行计算后,采用信息响应模块对驾驶人提前进行提醒警示,避免驾驶人在慌乱情绪下导致交通事故发生。
技术特征:
1.一种基于自动驾驶车辆的机非碰撞预警系统,其特征在于:所述的预警系统包括数据采集模块、数据处理模块、控制中心模块、信息通讯模块、信息响应模块;
2.根据权利要求1所述的一种基于自动驾驶车辆的机非碰撞预警系统,其特征在于:所述的数据采集模块包括视频录像单元、车辆信息获取单元、定位检测器、数据传输端口。
3.根据权利要求1所述的一种基于自动驾驶车辆的机非碰撞预警系统,其特征在于:所述的数据处理模块包括目标识别单元、数据计算单元、数据库单元、数据判断单元、数据传输端口。
4.根据权利要求1所述的一种基于自动驾驶车辆的机非碰撞预警系统,其特征在于:所述的控制中心模块包括数据划分单元、数据判断单元、指令输出单元、数据传输端口。
5.根据权利要求1所述的一种基于自动驾驶车辆的机非碰撞预警系统,其特征在于:所述的信息通讯模块包括有线通讯和无线通讯;其中无线通讯包括蓝牙、wifi、数据网络等一种或多种形式。
6.根据权利要求1所述的一种基于自动驾驶车辆的机非碰撞预警系统,其特征在于:所述的信息响应模块包括制动单元和信息显示单元;其中制动单元包括刹车系统和转向系统;信息显示单元包括汽车显示器、汽车音响。
7.一种基于自动驾驶车辆的机非碰撞预警方法,所述的方法适用于如权利要求1-6中任一项所述的系统,其特征在于:所述的方法如下:
技术总结
本发明公开了一种基于自动驾驶车辆的机非碰撞预警系统及方法,属于自动驾驶领域,所述的预警系统包括:数据采集模块、数据处理模块、控制中心模块、信息通讯模块、信息响应模块,本发明能够通过定位检测系统提供自动驾驶车辆的行驶环境,从而判断是否有必要开启碰撞预警系统,且在进行碰撞风险等级计算时,仅对自动驾驶车辆最小安全距离内的非机动车辆进行计算,有效避免了因无关的非机动车导致自车产生的算力资源浪费和不必要的减速行为。
技术研发人员:蔡晶,曾大囌,张然,李卓奇,龙思慧,郭凤香,赵蕊,王晓静
受保护的技术使用者:昆明理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!