基于AIS数据的交叉水域船舶会遇特征值提取方法
本发明涉及船舶智能化,尤其是涉及一种基于ais数据的交叉水域船舶会遇特征值提取方法。
背景技术:
1、随着海上船舶数量日益增加,交通复杂程度日趋复杂,船舶安全事故的发生几率亦越来越高。此外,随着船舶的发展越来越趋向于智能化,智能航行是实现船舶智能化中的重要一环,但至今为止研究成果并不显著,船舶还无法实现完全自主航行。
2、而交叉水域一直是船舶自主航行的重点和难点区域,为了确保船舶航行安全,有必要预先获知交叉水域内船舶的紧迫程度,从而便于及早对复杂水域的船舶交通加以干预,防止安全事故的发生,为海上安全管理提供便利。
3、但现有技术中,由于难以确定出交叉水域内船舶会遇局面特征值,导致无法准确获知交叉水域内船舶的紧迫程度,不利于推进船舶完全自主航行研究。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于ais数据的交叉水域船舶会遇特征值提取方法,能够从ais数据中挖掘出各种船舶行为的风险度,进而整体分析交叉水域的风险度。
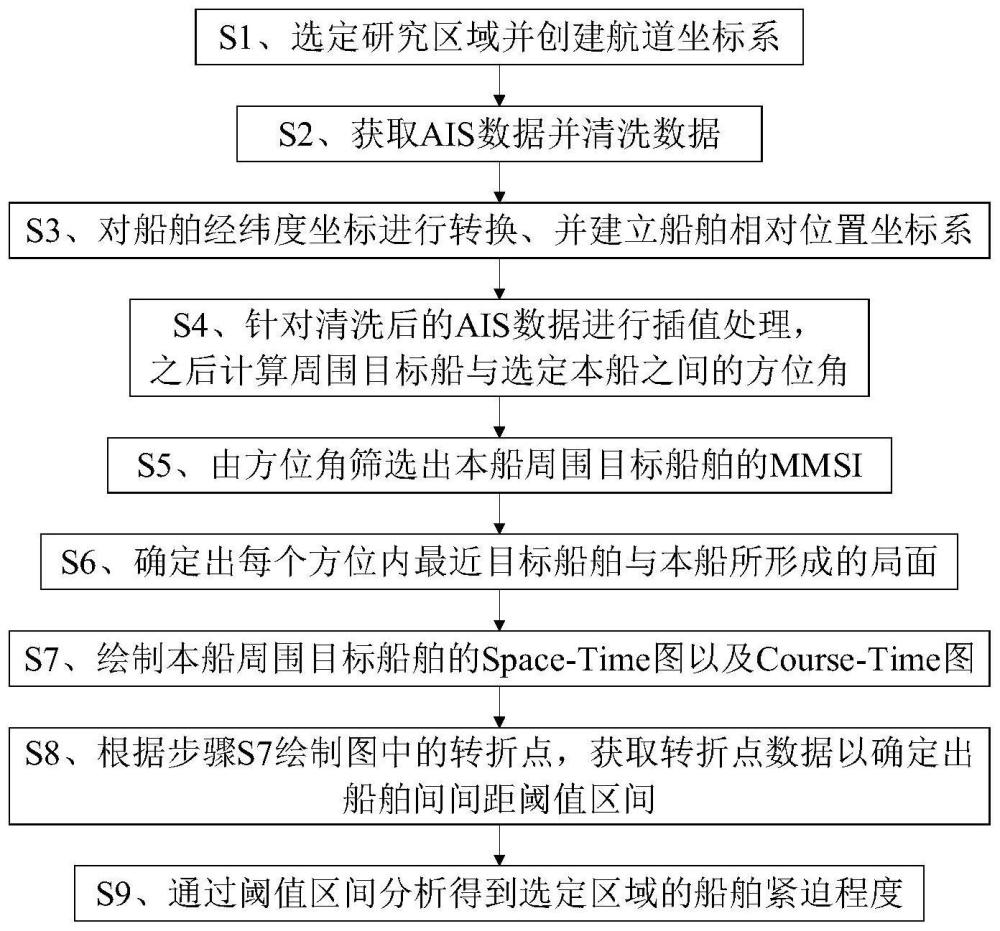
2、本发明的目的可以通过以下技术方案来实现:一种基于ais数据的交叉水域船舶会遇特征值提取方法,包括以下步骤:
3、s1、选定研究区域并创建航道坐标系;
4、s2、获取ais(automatic identification system船舶自动识别系统)数据并清洗数据;
5、s3、对船舶经纬度坐标进行转换、并建立船舶相对位置坐标系;
6、s4、针对清洗后的ais数据进行插值处理,之后计算周围目标船与选定本船之间的方位角;
7、s5、由方位角筛选出本船周围目标船舶的mmsi(maritime mobile serviceidentify,水上移动通信业务标识码);
8、s6、确定出每个方位内最近目标船舶与本船所形成的局面;
9、s7、绘制本船周围目标船舶的space-time图以及course-time图;
10、s8、根据步骤s7绘制图中的转折点,获取转折点数据以确定出船舶间间距阈值区间;
11、s9、通过阈值区间分析得到选定区域的船舶紧迫程度。
12、进一步地,所述步骤s1的具体过程为:
13、选择同时存在对遇、追越、交叉三种船舶行为的水域,以作为研究区域;
14、之后选定航道基准点,由航道基准点与时间序列对该航道建立平面三维立体坐标系,以航道走向为y轴、垂直于航道走向为x轴、时间序列为z轴。
15、进一步地,所述步骤s2中清洗数据的过程包括:去除重复数据;筛选掉mmsi不足9位的数据;清除轨迹点不足5个的船舶数据。
16、进一步地,所述步骤s3的具体过程为:将所选区域经纬度坐标转化为x、y值,设沿航道方向距离为y值、垂直航道方向距离为x值,由航道平面作x轴、y轴,由时间序列作z轴建立三维立体坐标系,利用该坐标系反映出船舶之间的相对位置坐标。
17、进一步地,所述步骤s4中针对清洗后的ais数据进行插值处理的具体过程为:
18、从清洗后的ais数据中提取直角坐标值、船舶速度、船舶转向角度,将提取出的数据进行时空同步,同步到设定的时间刻度,采用三次样条插值方式将时间序列与提取出的数据进行插值处理。
19、进一步地,所述步骤s4中计算周围目标船与选定本船之间的方位角的具体过程为:以本船为直角坐标系坐标原点,以正东为0°,沿逆时针方向建立直角坐标系;
20、以设定的r值为半径,划定本船的圆形区域、并筛选该圆形区域内的船舶ais数据点;
21、遍历除本船之外的所有插值后ais数据点,若周边ais数据点的x值大于本船的x值、且y值也大于本船的y值,则判定为该ais数据点在第一象限内;若周边ais数据点的x值小于本船的x值、且y值大于本船的y值,则判定为该ais数据点在第二象限内;依次类推,将所有ais数据点位于本船的哪一象限进行标定;
22、将本船与目标船直角坐标位点代入以下公式,计算求得目标船舶与本船之间的夹角,由夹角与象限号求的目标船位于本船的最终方位:
23、
24、其中,θ为转向角,x0为本船在垂直于航道方向上与基准点的距离,xi为目标船舶在垂直于航道方向上与基准点的距离,y0为本船在沿着航道方向上与基准点的距离,yi为目标船舶在沿着航道方向上与基准点的距离。
25、进一步地,所述步骤s5的具体过程为:基于以本船为中心筛选的圆形区域,进一步以一个设定尺寸的扇形对该圆形区域进行划分;
26、之后遍历每个扇形区域内的数据,计算出各扇形区域内每艘船舶与本船的hausdorff距离:
27、h(q,o)=max(h(q,o),h(o,q))
28、h(q,o)=max(q∈q)min(o∈o)‖q-o‖
29、h(o,q)=max(o∈o)min(q∈q)‖q-o‖
30、
31、其中,q=[q1,q2,q3,q4]为本船坐标集合,o=[o1,o2,o3,o4]为目标船舶坐标集合,qi(i=1,2,3,4)为本船边界点坐标,oi(i=1,2,3,4)为目标船边界点坐标,d为欧式距离,h(q,o)为两船间的hausdorff距离,h(q,o)为本船集合各点到目标船集合各点的最小值、再取最大值,‖q-o‖为本船与目标船间的欧式距离;
32、确定出各扇形区域内与本船之间hausdorff距离最短的船舶,并保存其mmsi号,由此得到多个目标船舶的mmsi。
33、进一步地,所述步骤s6的具体过程为:
34、首先以本船作为坐标原点、以船舶航行方向为0°,以顺时针方向建立坐标系;
35、计算出本船与方位内最近船舶的偏转角,利用偏转角修正直角坐标系下目标船的方向角,在修正角基础上通过将船舶航行方向确定为0°,以再次修正方向角,使得坐标系能够随着船舶航行动态建立,同时改变周围船舶的方位角值,通过本船所建立坐标系与目标船在当前坐标系下所处方位角,确定出目标船与本船所形成的局面,最后保存数据,包含:本船mmsi、目标船mmsi、两船之间间距、两船所存在的局面。
36、进一步地,所述步骤s7的具体过程为:基于步骤s6中保存的本船mmsi与对应周围最近船舶的mmsi,提取数据以计算出对应两船之间在各个时刻的欧氏距离,以距离间隔为纵轴、以时间序列为横轴,绘制space-time图;
37、再以目标船舶各个时刻的航向角为纵轴、以时间序列为横轴,绘制course-time图。
38、进一步地,所述步骤s8的具体过程为:
39、根据步骤s7绘制的space-time图和course-time图,获取各个方向上与本船相距最近的船舶间距,提取出对应时刻的转向角、转向角变化幅度超过预设变化阈值的数据;
40、由各个方向最近船舶间距中筛选出紧迫局面与紧迫危险的临界区间,由转向角变化幅度最大时刻对应的两船间距计算出无风险与紧迫局面的临界区间。
41、进一步地,所述步骤s9的具体过程为:根据步骤s8得到的两个临界区间,筛选保存数据的所有记录条数,分别筛选出各个局面下的数据,由两个临界区间边界分别筛选处于无风险、紧迫局面、紧迫危险、碰撞危险情况下的数据记录条数;
42、分析各个局面下紧迫船舶的比率,判断该区域发生哪种局面的风险高于预设风险阈值,从而整体判断船舶紧迫程度的高低。
43、与现有技术相比,本发明具有以下优点:
44、一、本发明提出一种基于ais数据的交叉水域船舶会遇特征值提取方法,首先选定研究区域并创建航道坐标系;之后获取ais数据并清洗数据;进行船舶经纬度坐标转换并建立坐标系;数据插值处理;计算周围目标船与选定本船之间的方位角;由方位角筛选本船周围目标船舶的mmsi;确认每个方位内最近目标船舶与本船所形成的局面;绘制本船周围目标船舶的space-time图以及course-time图;分析图示转折点并收集转折点数据、找到船舶间间距阈值区间;通过阈值区间分析该区域船舶紧迫程度。由此实现通过分析利用大量ais数据,以提取出数据中具有价值的各种动、静态信息,能够在某一区域历史ais数据中挖掘出各种船舶行为的风险度,进而整体分析选定区域的风险度,从而为船舶安全航行、密集区域内船舶管理提供了新的依据,对降低船舶碰撞风险具有强有力的实践意义。
45、二、本发明基于海量的ais数据对交通流复杂的交叉区域的船舶会遇方式进行判断筛选,分为交叉、对遇、追越三种船舶局面,在确定局面的基础上再分别将每种局面下的船舶间最小间距临界值筛选出来,以作为后续紧迫程度划分的阈值。除此之外在船舶间最小间距计算上运用hausdorff计算方法,代入船体轮廓坐标,使得两船间距更加准确。不仅能为智能船舶在交叉水域的行为作特征值界定,也能为交叉水域的船舶航行危险水平提供定量的评价指标,还能间接服务于水上交通管理规定(定线制)评价。
- 还没有人留言评论。精彩留言会获得点赞!