结构性数据缺失下基于超图神经网络的城市交通预测方法
本发明属于城市交通预测技术,具体为一种结构性数据缺失下基于超图神经网络的城市交通预测方法。
背景技术:
1、图卷积网络(gcn)模型在交通预测方面显示出有前途的潜力,然而仍然存在一些挑战。首先,它们假定存在一个完全观察到的特征矩阵。然而,在实际应用中,由于缺失数据既不可避免又普遍存在,这通常是不可行的。其次,它们采用了传统的图结构。但这种结构只能编码道路网络的单一模态2阶依赖性。然而,道路可能在语义上相关,而数据底层的相关性往往是高阶和多模态的,特别是在面对多源数据时。
技术实现思路
1、为了解决现有技术中的上述技术缺陷,本发明结构性数据缺失下基于超图神经网络的城市交通预测方法。
2、实现本发明目的的技术方案为:一种结构性数据缺失下基于超图神经网络的城市交通预测方法,包括以下步骤:
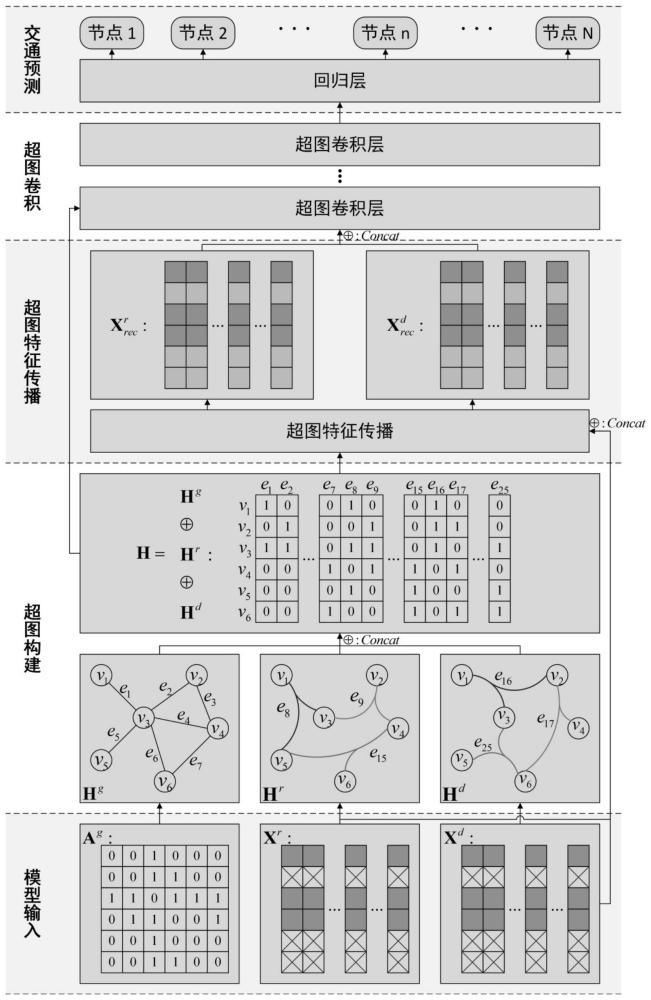
3、步骤1:提取目标地区中各个交通区域之间的静态空间拓扑结构数据与动态交通状态数据,构建交通区域邻接矩阵、以时间段为间隔的近期交通状态特征矩阵以及以天为间隔的历史交通状态特征矩阵;
4、步骤2:根据邻接矩阵、近期交通状态特征矩阵、历史交通状态特征矩阵建立基于二阶空间关联性的拓扑超图、基于连续时间段交通状态特征的语义超图以及基于每日交通状态特征的语义超图,将三个超图拼接后得到的新超图,新超图以时间段交通状态特征矩阵、每日交通状态特征矩阵;
5、步骤3:对新超图进行特征传播以填补缺失的特征值;
6、步骤4:以进行补全后的新超图的关联矩阵作为输入构建深度超图卷积网络,逐层进行超图卷积;
7、步骤5:利用训练集对深度超图卷积网络进行训练,获得最优模型参数,将下一时刻的交通状态特征输入至训练得到的最优模型,对下一时刻的交通状况进行预测。
8、优选地,提取目标地区中各个交通区域的静态空间拓扑结构数据与动态交通状态数据的具体步骤为:
9、提取目标地区各个交通区域之间的静态空间拓扑结构,记为交通区域邻接矩阵ag,交通区域邻接矩阵ag中的数据表示为:
10、
11、其中,ag(i,j)是邻接矩阵ag第i行,第j列的元素,vi为图中的第i个节点,对应为第i个交通区域;
12、根据各个交通区域在不同时间段内的交通状态数据,构建当前时刻t以时间段为间隔的近期交通状态特征矩阵xr,表示为:
13、
14、其中,表示n个区域在时刻t的交通状况,n表示交通区域的数量,p表示特征矩阵所选时间段的数量;近期交通状态特征矩阵xr中每一个行向量代表第i个区域的近期交通特征向量,列向量表示所有区域在不同时间段的交通状态信息,均为实数矩阵;
15、获取待预测时间段t+1在前q天的历史数据,构成以天为间隔的历史交通状态特征矩阵xd,表示为:
16、
17、其中,表示n个区域在下一个时间段t+1的交通状况,td表示每天包含的时间段的个数,q表示所考虑的天数。
18、优选地,根据近期交通状态特征矩阵、历史交通状态特征矩阵建立基于二阶空间关联性的拓扑超图、基于连续时间段交通状态特征的语义超图以及基于每日交通状态特征的语义超图,将三个超图拼接后得到的新超图的具体方法为:
19、步骤21:根据近期交通状态特征矩阵xr,由knn最近邻算法构建超边;
20、根据超边构建近期交通状况的语义超图其中表示交通区域的集合,表示近期语义超图中的超边集合;
21、步骤22:根据历史交通状态特征矩阵xd,由knn最近邻算法构建超边,将所有超边拼接构成关联矩阵hd,表示为
22、
23、其中是矩阵hd的第j条超边;
24、根据超边构建历史交通状态的语义超图语义超其中表示历史语义超图中的超边集合;
25、步骤23:根据提取的邻接矩阵ag,构建基于二阶空间关联性的拓扑超图用于反映交通状况的二阶空间关联性;
26、步骤24:将上述步骤中得到的基于空间拓扑超图、近期交通状态语义超图与历史交通状态语义超图对应的关联矩阵进行拼接,得到融合多模式高阶语义相关性综合超图综合超图由一个维度为的关联矩阵h描述;将步骤1中所建立的近期交通状态特征矩阵与历史交通状态特征矩阵拼接,构成综合交通状态特征矩阵
27、优选地,根据近期交通状态特征矩阵xr,由knn最近邻算法构建超边的具体方法为:
28、对于每一个节点vi,i=1,2,…,n,使用knn算法在矩阵xr的行向量中计算得到k-1个最近邻的节点;将节点vi和k-1个最近邻节点一同组建超边得到n条超边;
29、将所有超边拼接成一个的矩阵,记为关联矩阵hr,表示为:
30、
31、其中hr(i,j)是矩阵hr第i行,第j列的元素。
32、优选地,根据提取的邻接矩阵ag,构建基于二阶空间关联性的拓扑超图的具体方法为:
33、对于邻接矩阵ag的每一条边,将其视为仅包含两个节点的超边,以此构建空间拓扑超图该超图由一个的关联矩阵hg描述,;
34、
35、其中是hg的第j条超边,表示不同交通区域之间的二阶相关性,εg表示空间拓扑超图中的超边集合。
36、优选地,对新超图进行特征传播以填补缺失的特征值的具体方法为:
37、步骤31:将步骤2得到的超图通过如下方法转换成普通图gh,
38、ah=hwht-dv
39、其中ah是图gh的邻接矩阵,h是超图的关联矩阵,dv和w分别是节点度矩阵和超边
40、权重矩阵,上标t表示矩阵的转置;
41、步骤32:对节点近期交通状态特征矩阵为中元素次序进行调整得到,
42、
43、其中,表示已知特征的节点组成的矩阵,表示未知特征的节点组成的矩阵;归一化后的邻接矩阵为
44、
45、其中,下标kk表示对应行节点已知,对应列节点已知;下标ku表示对应行节点未知,对应列节点已知;下标uk表示对应行节点已知,对应列节点未知;下标uu表示对应行节点未知,对应列节点未知;
46、步骤33:通过特征传播来填补矩阵xr中的缺失值,特征传播的迭代公式如下:
47、
48、其中xr,(k)表示第k次迭代后的节点近期交通状态特征矩阵,xr,(k+1)表示第k+1次迭代后的节点近期交通状态特征矩阵;
49、步骤34:将迭代后矩阵中已知特征的节点的值重置为原始的已知特征值,至此完成矩阵xr中缺失值的填补,将补全后的矩阵命名为
50、步骤35:采用步骤32~34的方法,对历史交通状态特征矩阵xd进行填补,得到补全后的矩阵
51、优选地,将三个超图拼接后得到的新超图作为深度网络的输入,进行超图卷积,具体方法为:
52、步骤41:将步骤24得到的维度为的关联矩阵h和步骤34、35得到的特征矩阵和作为输入;
53、步骤42:利用深度网络进行超图卷积,所述深度网络由多个超图卷积层堆叠而成,各超图卷积层的计算公式为:
54、
55、其中是超图中第l层的输入信号,是第l层的参数矩阵,σ是非线性激活函数,dv,de和w分别是节点度矩阵、超边度矩阵与超边权重矩阵。
56、优选地,利用训练集对预测模型进行训练,最小化预测值和真实值之间的误差,解算预测模型最佳参数的具体方法为:
57、步骤51:根据n个交通区域在t个时间段内的交通状态观测值,构建训练集其中为特征矩阵,为预测标签,p表示特征矩阵所选时间段的数量;
58、步骤52:将训练集输入至预测模型进行训练,模型训练的目标函数为:
59、
60、式中,第一项是预测的均方差经验损失项,第二项是一个模型参数正则化项,表示超图上参数为θ的预测模型,为损失函数,m=t-p为样本的个数;
61、步骤53:模型训练后,将当前时刻的特征矩阵输入值至训练后得到的最优模型,获得下一时刻交通状况的预测为:
62、
63、其中为当前时刻的特征矩阵,为学习后的最优模型参数。
64、本发明与现有技术相比,其显著优点为:
65、(1)本发明采用基于超图的交通速度预测框架进行城市范围的交通速度预测,在一个统一的框架内结合了链接的2阶地理依赖性和交通速度的多模态高阶语义相关性,并使用结构性缺失数据来预测交通速度;
66、(2)本发明基于超图进行特征传播来处理超图学习模型中的缺失特征,通过在已知特征的节点之间传播特征,已知特征被用作边界条件,能够在高缺失率下重建结构性缺失特征;
67、(3)本发明引入了一种新颖的卷积算子,用于在超图上学习特征表示,基于图卷积和超图学习理论,通过利用多模态高阶相关性,在顶点之间实现更通用的信息传播,类似于图卷积,用于构建深度超图网络的基本构建块。
68、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分的从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!