基于双层优化的车辆匝道汇入决策方法及系统
本发明涉及交通控制系统,特别涉及一种基于双层优化的车辆匝道汇入决策方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。
2、智能驾驶技术是指车辆在无人或者少人干预的情况下,能够自主感知周围环境,对自身进行定位,进行决策和规划,并执行相应的跟踪控制操作,从而实现安全、高效、舒适的行驶。车辆的匝道汇入过程,是指从匝道进入高速公路主线的过程。其需要在有限的时间和空间内与主线车辆协调,找到合适的位置和速度,完成汇入动作。为智能车辆匝道汇入过程进行决策规划,对于提高智能车辆在复杂交通场景中的行驶安全性、交通效率性和乘坐舒适性具有重要的意义与价值。
3、在匝道车辆的汇入过程中,其需要在加速车道上进行纵向速度调整,并换道至主线车道上的目标间隙中。这两个过程是相互影响、动态耦合的:不同的汇入间隙会导致自我车辆进行不同的速度调整,而自我车辆的速度变化也会影响汇入间隙的可用性。传统的匝道控制方法可以有效地调节交通需求和供给,但是不能在微观上考虑车辆复杂的驾驶行为。基于规则的汇入决策方法计算复杂度较低,容易实现和部署;然而其不能适应动态复杂的交通环境,决策的最优性也受限。基于机器学习的方法有潜力适应高度动态复杂的交通环境,但是其需要大量的有效训练数据和训练资源;另外,模型的决策过程对于人类不够透明,解释性差,其在智能车辆上的应用仍需要突破许多安全性问题以及信任和伦理问题,目前的研究尚未能良好地解决纵向速度调整与汇入间隙选择之间的动态耦合问题。
技术实现思路
1、为了解决现有技术的不足,本发明提供了一种基于双层优化的车辆匝道汇入决策方法及系统,解决了智能车辆在匝道汇入过程中纵向(即沿主线车道方向)速度调整与汇入间隙选择之间的动态耦合的问题,保证了汇入的安全性。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供了一种基于双层优化的车辆匝道汇入决策方法。
4、一种基于双层优化的车辆匝道汇入决策方法,包括以下过程:
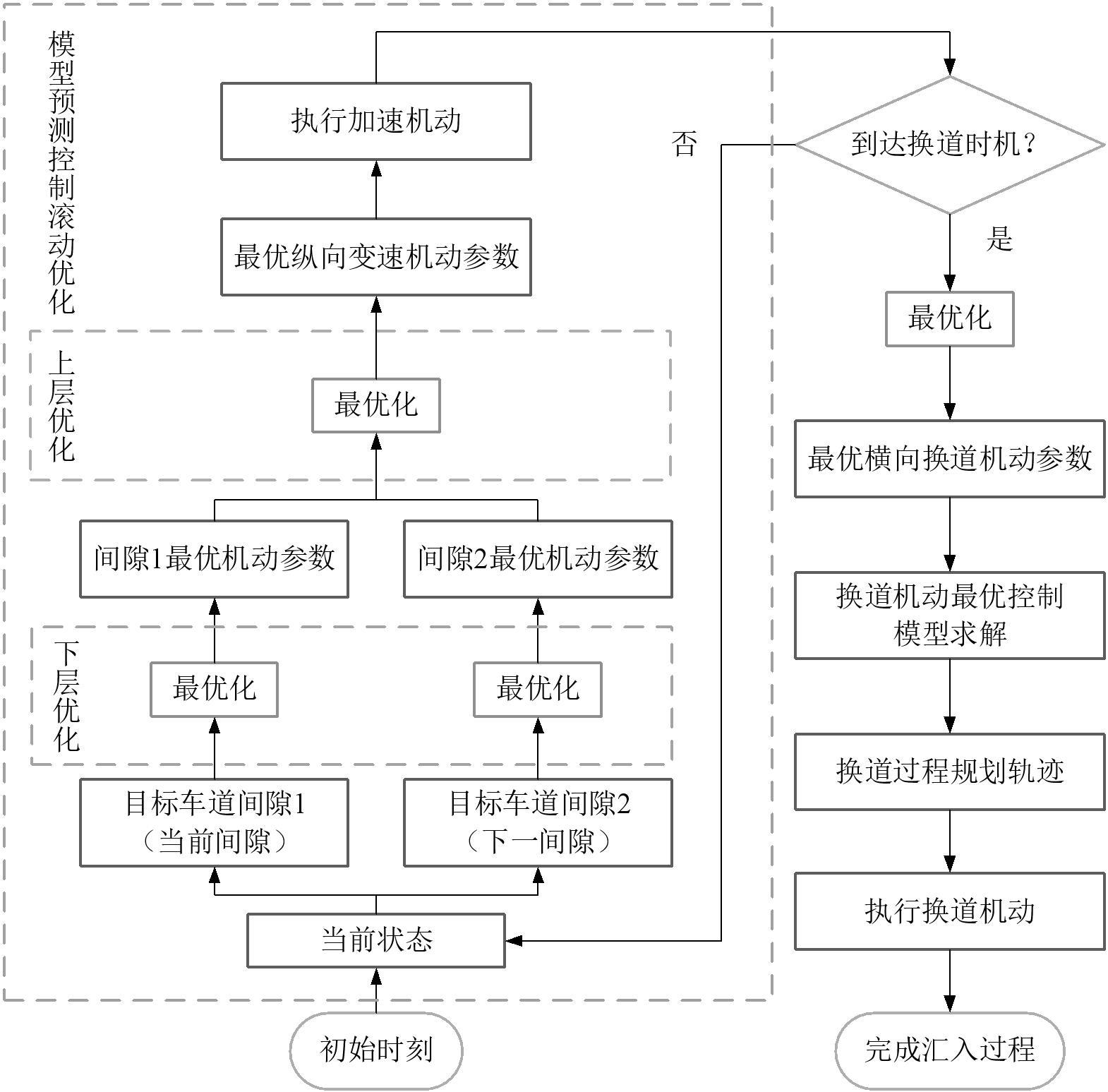
5、获取待汇入的匝道车辆自身及周边环境中物体的运动状态数据,根据获取的运动状态数据,得到主线车道上的当前汇入间隙和下一汇入间隙,确定两个汇入间隙各自的前后车辆;
6、根据两个汇入间隙各自前后车辆的运动状态数据,对所涉及车辆执行匀速预测,执行下层优化获得两个汇入间隙匝道车辆的最优纵向机动参数,所述纵向为主线车道方向;
7、对两个汇入间隙各自的最优机动参数执行上层优化,得到最优汇入间隙,根据最优汇入间隙对应的匝道车辆纵向机动参数进行汇入控制。
8、作为本发明第一方面进一步的限定,当前汇入间隙的下层优化中,以第一正值权重系数与规划时间的乘积再与规划速度的差值最小为目标;下一汇入间隙的下层优化中,以规划时间的最小为目标。
9、作为本发明第一方面进一步的限定,上层优化中,以第二正值权重系数与规划时间的乘积为第一变量,以第三正值权重系数与匝道车辆同下一汇入间隙前车的车头时距的乘积为第二变量;
10、以第四正值权重系数与匝道车辆同下一汇入间隙后车的车头时距的乘积为第三变量,以第一变量减去第二变量和第二变量之后的结果最小为优化目标,得到目标汇入间隙。
11、作为本发明第一方面更进一步的限定,根据匝道车辆以当前车速行驶到加速车道末端的剩余时间,进行第二正值权重系数的选择。
12、作为本发明第一方面进一步的限定,如果选择的纵向变速机动时间小于设定时间阈值,则开始执行换道;或者,如果匝道车辆与加速车道末端的距离小于设定阈值,则开始执行换道。
13、作为本发明第一方面更进一步的限定,以第五正值权重系数与换道时间的乘积再与规划速度的差值的最小化为目标,得到匝道车辆的换道机动参数,根据换道机动参数进行匝道车辆的换道控制。
14、第二方面,本发明提供了一种基于双层优化的车辆匝道汇入决策系统。
15、一种基于双层优化的车辆匝道汇入决策系统,包括:
16、汇入间隙确定模块,被配置为:获取待汇入的匝道车辆自身及周边环境中物体的运动状态数据,根据获取的运动状态数据,得到主线车道上的当前汇入间隙和下一汇入间隙,确定两个汇入间隙各自的前后车辆;
17、下层优化模块,被配置为:根据两个汇入间隙各自前后车辆的运动状态数据,对所涉及车辆执行匀速预测,执行下层优化获得两个汇入间隙匝道车辆的最优纵向机动参数,所述纵向为主线车道方向;
18、上层优化模块,被配置为:对两个汇入间隙各自的最优机动参数执行上层优化,得到最优汇入间隙,根据最优汇入间隙对应的匝道车辆纵向机动参数进行汇入控制。
19、作为本发明第二方面进一步的限定,下层优化模块中,当前汇入间隙的下层优化中,以第一正值权重系数与规划时间的乘积再与规划速度的差值最小为目标;下一汇入间隙的下层优化中,以规划时间的最小为目标。
20、作为本发明第二方面进一步的限定,上层优化模块中,以第二正值权重系数与规划时间的乘积为第一变量,以第三正值权重系数与匝道车辆同下一汇入间隙前车的车头时距的乘积为第二变量;
21、以第四正值权重系数与匝道车辆同下一汇入间隙后车的车头时距的乘积为第三变量,以第一变量减去第二变量和第二变量之后的结果最小为优化目标,得到目标汇入间隙。
22、作为本发明第二方面进一步的限定,如果选择的纵向变速机动时间小于设定时间阈值,则开始执行换道;或者,如果匝道车辆与加速车道末端的距离小于设定阈值,则开始执行换道;
23、以第五正值权重系数与换道时间的乘积再与规划速度的差值的最小化为目标,得到匝道车辆的换道机动参数,根据换道机动参数进行匝道车辆的换道控制。
24、第三方面,本发明提供了一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方面所述的基于双层优化的车辆匝道汇入决策方法中的步骤。
25、第四方面,本发明提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方面所述的基于双层优化的车辆匝道汇入决策方法中的步骤。
26、第五方面,本发明提供了一种车辆,采用本发明第一方面所述的基于双层优化的车辆匝道汇入决策方法进行汇入控制;或者,包括本发明第三方面所述的计算机可读存储介质;或者,包括本发明第四方面所述的电子设备。
27、与现有技术相比,本发明的有益效果是:
28、1、本发明同时解决了智能车辆纵向速度调整与汇入间隙选择之间动态耦合的问题,能够在主线间隙后车不同的运动意图(超越或者让行)情况下做出对应的合理汇入动作,保证了汇入的安全性。
29、2、在主线间隙后车具有超越意图的情景中,本发明能够侧重安全性进行汇入,在主线间隙后车具有让行意图的情景中,本发明能够侧重效率性进行汇入,本发明能够在符合人类驾驶员交互习惯的前提下进行匝道汇入,进一步的提高了汇入的安全性。
30、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!