一种交通拥堵控制方法、装置及计算机可读存储介质
本发明涉及交通,尤其是指一种交通拥堵控制方法、装置及计算机可读存储介质。
背景技术:
1、随着城市化进程的加快,城市道路的交通拥堵问题越来越严重,对居民的出行影响也越来越大,因此,如何缓解交通拥堵问题是目前亟需解决的问题。
2、现代缓解交通拥堵的方法中,基于宏观基本图(macroscopic fundamentaldiagram,mfd)的车辆路径引导与区域边界控制已经成为一个热门课题,基于mfd得到区域交通效率最高的车辆数区间并将区域车辆维持在该区间内,从而最大化区域交通的集散。现有的基于mfd的车辆路径引导与区域边界控制的方法大致分为两种:第一种是仅关注边界控制的交通控制方法,这种方法能够有效减少车辆进入拥堵区域,但是忽略了对于车辆的路径诱导,所以存在无法有效利用道路网络资源以及无法为车辆提供最优交通流路径选择的问题;第二种是仅关注路径诱导的交通控制方法,能够有效引导车辆选择较为顺畅的路径,但是忽略了对于车辆的边界控制,导致车辆在拥堵区域外的道路上游荡,浪费道路资源,无法有效利用道路网络容量;因此,现有的缓解交通拥堵的方法未考虑对边界控制和路径诱导的协同优化,导致车辆在选择路径时无法同时考虑拥堵情况和利用道路网络资源。
3、除此之外,现有的缓解交通拥堵方法只关注交通效率,缺乏对区域交通安全的考虑,而在缓解区域交通拥堵问题的同时减少交通事故,对于居民的出行和城市发展均有重要影响。
4、综上所述,如何设计一种既兼顾边界控制和路径诱导,还能同时保证区域交通安全的交通拥堵缓解方法是目前需要解决的问题。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中的交通拥堵控制方法无法兼顾边界控制和路径诱导,以及并未考虑区域交通安全的问题。
2、为解决上述技术问题,本发明提供了一种交通拥堵控制方法,包括:
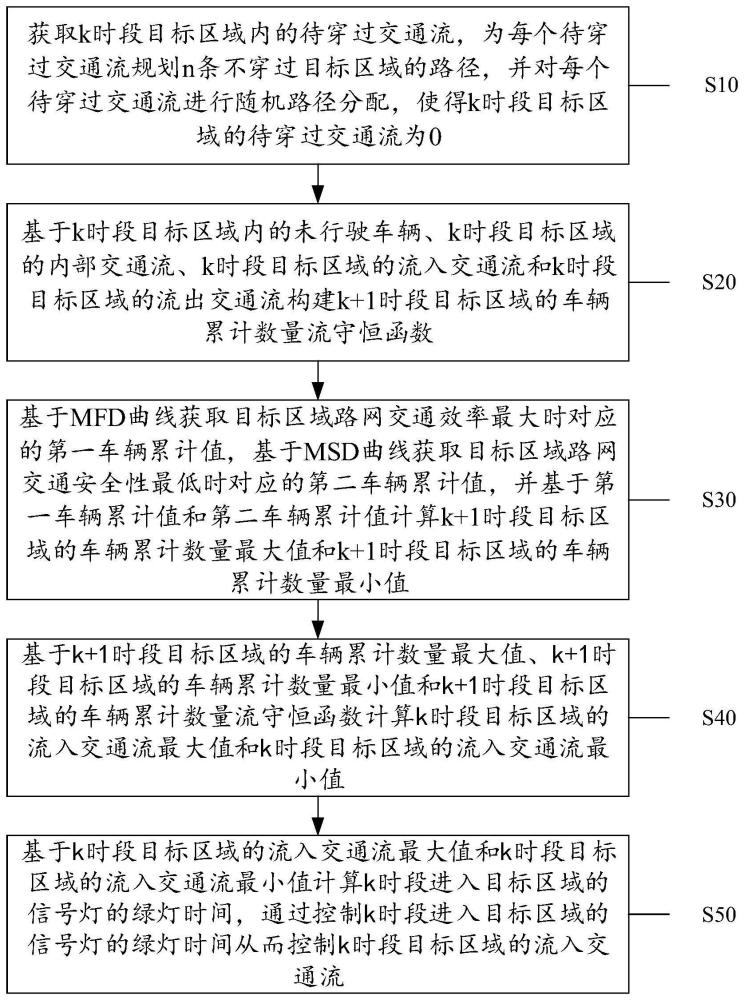
3、获取k时段目标区域内的待穿过交通流,为每个待穿过交通流规划n条不穿过目标区域的路径,并对每个待穿过交通流进行随机路径分配,使得k时段目标区域的待穿过交通流为0;
4、基于k时段目标区域内的未行驶车辆、k时段目标区域的内部交通流、k时段目标区域的流入交通流和k时段目标区域的流出交通流构建k+1时段目标区域的车辆累计数量流守恒函数;
5、基于mfd曲线获取目标区域路网交通效率最大时对应的第一车辆累计值,基于msd曲线获取目标区域路网交通安全性最低时对应的第二车辆累计值,并基于所述第一车辆累计值和所述第二车辆累计值计算k+1时段目标区域的车辆累计数量最大值和k+1时段目标区域的车辆累计数量最小值;
6、基于所述k+1时段目标区域的车辆累计数量最大值、所述k+1时段目标区域的车辆累计数量最小值和所述k+1时段目标区域的车辆累计数量流守恒函数计算k时段目标区域的流入交通流最大值和k时段目标区域的流入交通流最小值;
7、基于所述k时段目标区域的流入交通流最大值和所述k时段目标区域的流入交通流最小值计算k时段进入目标区域的信号灯的绿灯时间,通过控制k时段进入目标区域的信号灯的绿灯时间从而控制k时段目标区域的流入交通流。
8、在本发明的一个实施例中,所述k+1时段目标区域的车辆累计数量流守恒函数为:
9、n(k+1)=n(k)+t[q(k)+qin(k)-q′(k)-qout(k)],
10、其中,n(k+1)表示k+1时段目标区域的车辆累计数量,n(k)表示k时段目标区域内的未行驶车辆数量,t表示k时段和k+1时段之间的时间间隔,q(k)表示k时段目标区域产生的内部交通流,qin(k)表示k时段目标区域的流入交通流,q′(k)表示k时段目标区域完成的内部交通流,qout(k)表示k时段目标区域的流出交通流。
11、在本发明的一个实施例中,所述k+1时段目标区域的车辆累计数量最大值的计算公式为:
12、nmax(k+1)=nmfd+α(nmsd-nmfd),
13、其中,nmax(k+1)表示k+1时段目标区域的车辆累计数量最大值,nmfd表示基于mfd曲线得到的路网交通效率最大时对应的第一车辆累计值,nmsd表示基于msd曲线得到的路网交通安全性最低时对应的第二车辆累计值,α为预设参数;
14、所述k+1时段目标区域的车辆累计数量最小值的计算公式为:
15、nmin(k+1)=nmfd-α(nmsd-nmfd),
16、其中,nmin(k+1)表示k+1时段目标区域的车辆累计数量最小值。
17、在本发明的一个实施例中,所述k时段目标区域的流入交通流最大值的计算公式为:
18、
19、其中,qc(k)表示k时段目标区域的待穿过交通流;
20、所述k时段目标区域的流入交通流最小值的计算公式为:
21、
22、在本发明的一个实施例中,基于所述k时段目标区域的流入交通流最大值和所述k时段目标区域的流出交通流最小值计算k时段进入目标区域的信号灯的绿灯时间包括:
23、当qin,min(k)≤qmin时,
24、其中,qin,min(k)表示k时段目标区域的流入交通流最小值,qmin表示进入目标区域的所有交叉路口的信号灯均为最短绿灯时间时能够进入目标区域的交通流,gi,j(k)表示k时段进入目标区域的第i个交叉路口的第j个信号灯的绿灯时间,gmin表示信号灯的最短绿灯时间,m表示进入目标区域的交叉路口数量,x表示进入目标区域的每个交叉路口处的信号灯数量;
25、当qin,max(k)≥qmax时,
26、其中,qin,max(k)表示k时段目标区域的流入交通流最大值,qmax表示进入目标区域的所有交叉路口的信号灯均为最长绿灯时间时能够进入目标区域的交通流,gmax表示信号灯的最长绿灯时间。
27、在本发明的一个实施例中,当qin,min(k)≥qmin,且qin,max(k)≤qmax时,
28、基于k时段目标区域的流入交通流最小值计算k时段进入目标区域的第i个交叉路口的第j个信号灯处可通过的交通流最小值;
29、基于所述k时段进入目标区域的第i个交叉路口的第j个信号灯处可通过的交通流最小值计算k时段进入目标区域的第i个交叉路口的第j个信号灯的最短绿灯时间;
30、基于k时段目标区域的流入交通流最大值计算k时段进入目标区域的第i个交叉路口的第j个信号灯处可通过的交通流最大值;
31、基于所述k时段进入目标区域的第i个交叉路口的第j个信号灯处可通过的交通流最大值计算k时段进入目标区域的第i个交叉路口的第j个信号灯的最长绿灯时间。
32、在本发明的一个实施例中,所述k时段进入目标区域的第i个交叉路口的第j个信号灯处可通过的交通流最小值的计算公式为:
33、
34、其中,fi,j_min(k)表示k时段进入目标区域的第i个交叉路口的第j个信号灯处可通过的交通流最小值,hi,j(k)表示k时段由进入目标区域的第i个交叉路口的第j个信号灯控制的交通流;
35、所述k时段进入目标区域的第i个交叉路口的第j个信号灯的最短绿灯时间的计算公式为:
36、gi,j_min(k)=tloss+fi,j_min(k)ht,
37、其中,gi,j_min(k)表示k时段进入目标区域的第i个交叉路口的第j个信号灯的最短绿灯时间,tloss表示绿灯损失时间,ht表示饱和车头时距;
38、所述k时段进入目标区域的第i个交叉路口的第j个信号灯处可通过的交通流最大值的计算公式为:
39、
40、其中,fi,j_max(k)表示k时段进入目标区域的第i个交叉路口的第j个信号灯处可通过的交通流最大值;
41、所述k时段进入目标区域的第i个交叉路口的第j个信号灯的最长绿灯时间的计算公式为:
42、gi,j_max(k)=tloss+fi,j_max(k)ht,
43、其中,gi,j_max(k)表示k时段进入目标区域的第i个交叉路口的第j个信号灯的最长绿灯时间。
44、在本发明的一个实施例中,获取k时段目标区域的待穿过交通流,为每个待穿过交通流规划n条不穿过目标区域的路径,并对每个待穿过交通流进行随机路径分配包括:
45、基于获取k时段目标区域的待穿过交通流,为每个待穿过交通流规划n条不穿过目标区域的路径,并基于各个路径的阻抗计算每条路径被选择的概率,所述每条路径被选择的概率计算公式为:
46、
47、其中,表示k时段从起点o到终点d之间的第r条不穿过目标区域的路径被选择的概率,cr表示第r条不穿过目标区域的路径阻抗,n表示从起点o到终点d之间的不穿过目标区域的路径数量,θ为常数;
48、基于n条路径被选择的概率构建[0,1]之间的n个概率区间,所述n个概率区间表示为:
49、
50、对于目标区域的待穿过交通流随机生成一个大于0且小于1的数字,若所述数字落在所述n个概率区间中的第d个概率区间,则为所述目标区域的待穿过交通流分配第d条不穿过目标区域的路径。
51、本发明还提供了一种交通拥堵控制装置,包括:
52、路径诱导模块,用于获取k时段目标区域内的待穿过交通流,为每个待穿过交通流规划n条不穿过目标区域的路径,并对每个待穿过交通流进行随机路径分配,使得k时段目标区域的待穿过交通流为0;
53、流守恒函数构建模块,用于基于k时段目标区域内的未行驶车辆、k时段目标区域的内部交通流、k时段目标区域的流入交通流和k时段目标区域的流出交通流构建k+1时段目标区域的车辆累计数量流守恒函数;
54、第一计算模块,用于基于mfd曲线获取目标区域路网交通效率最大时对应的第一车辆累计值,基于msd曲线获取目标区域路网交通安全性最低时对应的第二车辆累计值,并基于所述第一车辆累计值和所述第二车辆累计值计算k+1时段目标区域的车辆累计数量最大值和k+1时段目标区域的车辆累计数量最小值;
55、第二计算模块,用于基于所述k+1时段目标区域的车辆累计数量最大值、所述k+1时段目标区域的车辆累计数量最小值和所述k+1时段目标区域的车辆累计数量流守恒函数计算k时段目标区域的流入交通流最大值和k时段目标区域的流入交通流最小值;
56、第三计算模块,用于基于所述k时段目标区域的流入交通流最大值和所述k时段目标区域的流入交通流最小值计算k时段进入目标区域的信号灯的绿灯时间,通过控制k时段进入目标区域的信号灯的绿灯时间从而控制k时段目标区域的流入交通流。
57、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的交通拥堵控制方法的步骤。
58、本发明提供的交通拥堵控制方法在对目标区域的车辆累计数量进行控制之前,先目标区域的待穿过交通流进行了路径诱导,使其不穿过目标区域即可到达目的地,减小了目标区域内的道路拥堵,提高了路网的整体使用效率;另外,本技术基于路网交通效率最大时对应的第一车辆累计值和路网交通安全性最低时对应的第二车辆累计值计算目标区域的车辆累计数量最大值和最小值,并基于车辆累计数量最大值和最小值得到目标区域的流入交通流最大值和最小值,通过控制进入目标区域的信号灯的绿灯时间使得目标区域的流入交通流处于最大值和最小值之间,从而对目标区域的车辆累计数量进行控制,既考虑了路网的交通效率还考虑了路网的安全性;因此,本技术提供的交通拥堵控制方法兼顾了边界控制和路径诱导,缓解了交通拥堵,提高了路网的整体使用效率,除此之外,在保障路网交通效率的同时还提高了交通安全性。
- 还没有人留言评论。精彩留言会获得点赞!