一种基于商用车编队的智能驱动制动结合系统
本发明涉及一种基于商用车编队的智能驱动制动结合系统。
背景技术:
1、商用车编队行驶是一种先进的技术,旨在提高车队行驶的安全性、效率和稳定性。商用车编队采用智能控制技术,能够实时监测车队中各辆车的状态和相互之间的距离,这使得系统能够根据车辆之间的距离和相对速度进行精确的调节。但是目前关于商用车行驶安全间距大多基于车辆正常行驶的情况进行调控,很少关注车辆在制动和制动之后起步阶段的车辆间距调节。为了提高商用车在制动时的安全性,保证车辆制动时有足够的制动距离,可以考虑使编队中越靠后的车辆在制动时的制动减速度越大,从而使其制动距离越短;同时在制动后起步时使编队中越靠后的车辆的驱动力越大,保证编队能恢复到制动之前的车辆间距,保证编队行驶的节能性。因此为实现上述目的,本发明提出了一种基于商用车编队的智能驱动制动结合系统。
技术实现思路
1、本发明的目的在于提供一种基于商用车编队的智能驱动制动结合系统,以解决上述背景技术中所面临的问题。
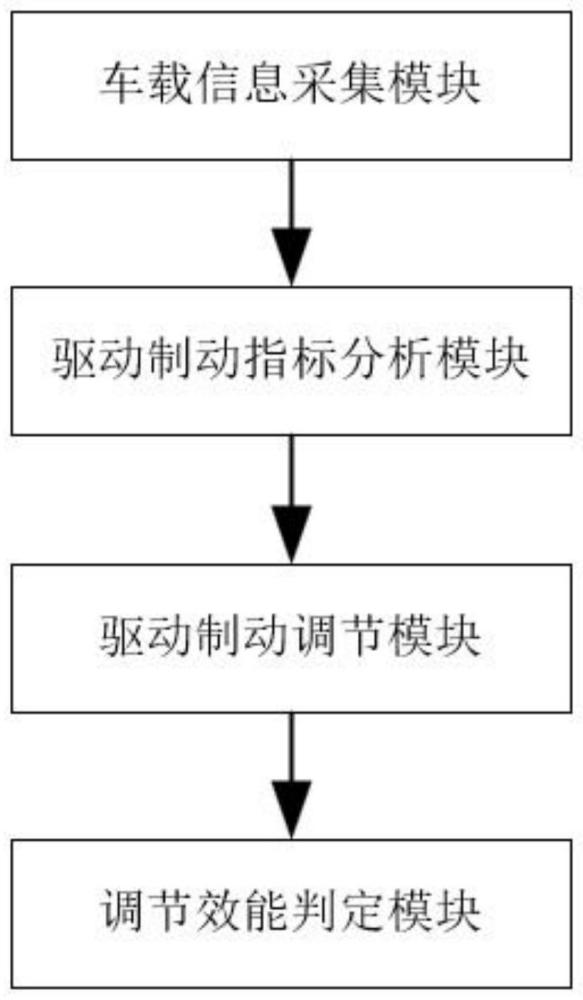
2、为实现上述目的,本发明提供如下技术方案:车载信息采集模块,驱动制动指标分析模块,驱动制动调节模块,调节效能判定模块;
3、所述一种基于商用车编队的智能制动系统适用于编队车辆数目是4的倍数的商用车编队,商用车队列从头车到尾车按顺序每四辆商用车为一个子编队,每个子编队中的车辆按顺序编号为i,i取值为从1到4,每两个子编队之间的距离s0需满足以下条件:
4、
5、其中,v表示子编队第四辆车车速,vr表示子编队第四辆车与后车的相对车速,a表示子编队第四辆车的制动减速度,al表示子编队第四辆车后车的制动减速度,t1表示驾驶员反应时间,t2表示制动系统反应时间,l0表示车辆停止后编队第四辆车与后车的间距;
6、所述车载信息采集模块用于采集车辆的行驶数据,包括:每个子编队中的车辆编号i,各轮胎地面垂向力数值中的最大值fzmax,整车质量m,当地重力加速度g,每辆商用车的轮胎数n,车辆的实际装载质量me,车辆的额定装载质量ma,各轮胎被磨损了的最大厚度值dmax,各轮胎被磨损了的最小厚度值dmin,各轮胎被磨损了的平均厚度值距离上次维护通信系统的时间间隔tmain,上次维护通信系统和下次维护通信系统之间的时间间隔tcyc,距离上次维护驱动系统的时间间隔tmain1,上次维护驱动系统到下次维护驱动系统之间的时间间隔tcyc1,距离上次维护制动系统的时间间隔tmain2,上次维护制动系统和下次维护制动系统之间的时间间隔tcyc2,各子编队中第i辆车的道路阻力fψ,i,各子编队中第i辆车辆的空气阻力fw,i,各子编队中第i辆车辆的加速阻力fj,i,各子编队中第i辆车的地面纵向力fx驱,i,各子编队中第i辆车的从动轮的地面纵向力fx从,i,各子编队中第i辆车的坡道阻力fθ,i;
7、所述驱动制动指标分析模块用于采集并计算关于每辆编队车辆状态的各项指标参数,包括:
8、s1、建立子编队中每辆车的运动模型
9、s1.1建立子编队中每辆车行驶时的驱动力模型,车辆驱动力fdrive满足公式:
10、fdrive=fψ+fw+fj
11、其中,fψ表示每辆车各自的道路阻力,包括滚动阻力和坡道阻力,fw表示每辆车各自的空气阻力,fj表示每辆车各自的加速阻力;
12、s1.2建立子编队中每辆车制动时的制动减速度模型,车辆制动减速度abrake满足公式:
13、
14、其中,m表示整车质量,fx驱表示每辆车各自的驱动轮的地面纵向力,fx从表示每辆车各自的从动轮的地面纵向力,fw表示每辆车各自的空气阻力,fθ表示每辆车各自的坡道阻力;
15、s2、根据以下公式计算出子编队中每辆车的状态指标,包括:
16、s2.1根据子编队中第i辆车的实际情况计算出各车辆的负载分指标k1,i,
17、
18、其中,w1、w2表示权重系数;
19、k11表示负载均匀系数,其值取决于各轮载荷分布系数其中fzmax表示各轮胎地面垂向力数值中的最大值,m表示整车质量,g表示当地重力加速度,n表示每辆商用车的轮胎数,当δ≤1.1时,k11=1.0,当1.1<δ≤1.3时,k11=1.2,当δ>1.3时,k11=1.5;
20、k12表示货物危险系数,当商用车运载货物为危险化学物品时,k12=0.8,当商用车运载货物为玻璃制品时,k12=0.9,当商用车运载货物为冷藏保鲜物品时,k12=1.1,其余情况,k12=1.0;
21、k13表示货物状态系数,当运载货物状态为液体时,k13=0.9,当运载货物状态为颗粒状和粉末状时,k13=1.1,其余情况,k13=1.0;
22、k14表示装载百分比系数,其值取决于车辆的装载比例η,其中me表示驾驶员的实际装载质量,ma表示驾驶员的额定装载质量,当η≤50%时,k14=0.8,当50%<η≤80%时,k14=1.0,当η>80%,k14=1.2;
23、k15表示货物包装系数,当货物没有外盒包装措施时,k15=0.8,当货物有外盒包装措施时,k15=1.0;
24、k16表示运输环境严格系数,当货物对于运输环境有严格的温度和湿度要求时,k16=0.8,其余情况,k16=1.0;
25、k17表示轮胎磨损一致系数,其值取决于每辆商用车轮胎磨损均匀系数其中,dmax表示各轮胎被磨损了的最大厚度值,dmin表示各轮胎被磨损了的最小厚度值,表示各轮胎被磨损了的平均厚度值,当η<15%时,k17=1.2,当η≥15%时,k17=1.6;
26、s2.2根据子编队中第i辆车的实际情况计算出各车辆的信息同步性分指标k2,i,
27、
28、其中,w3、w4表示权重系数;
29、k21表示通信延迟系数,其值取决于编队车辆之间的平均通讯延迟时间tde,k21=10tde;
30、k22表示网络可靠性系数,当发生网络中断和通信故障时,k22=1.3,其余情况,k22=1.0;
31、k23表示编队规模系数,其值取决于商用车编队的子编队数量n,
32、k24表示驾驶环境系数,当编队在雨天行驶时,k24=1.1,当编队在雪天行驶时,k24=1.3,当编队在大雾天气下行驶时,k24=1.2,其余情况,k24=1.0;
33、k25表示驾驶道路条件系数,当编队在山区道路和乡村道路行驶时,k25=1.2,当编队在高速公路行驶时,k25=1.3,其余情况,k25=1.0;
34、k26表示通信系统维护系数,其值取决于距离上次维护通信系统的时间间隔tmain和上次维护通信系统到下次维护通信系统之间的时间间隔tcyc,当时,k26=1.3,当时,k26=1.2,当时,k26=1.1,k26=1.0;
35、s2.3根据子编队中第i辆车的实际情况计算出各车辆的驱动分指标k3,i,
36、
37、其中,w5、w6表示权重系数;
38、k31表示能量回收系数,当编队车辆有制动能量回收装置辅助驱动时,k31=0.9,其余情况,k31=1.0;
39、k32表示驾驶模式系数,其值取决于子编队领头车驾驶员的驾驶风格,当驾驶员偏好运动模式时,k32=1.5,当驾驶员偏好舒适模式时,k32=0.8,其余情况,k32=1.0;
40、k33表示行驶干扰系数,当编队行驶过程中有外来车辆进入干扰时,对于行驶在外来车辆前面的商用车,k33=1.2,其余情况,k33=1.0;
41、k34表示行驶温度系数,当车辆发动机和电池处于非适宜工作温度范围时,k34=0.8,其余情况,k34=1.0;
42、k35表示驱动系统维护系数,其值取决于距离上次维护驱动系统的时间间隔tmain1、上次维护驱动系统和下次维护驱动系统之间的时间间隔tcyc1,当时,k35=1.3,当时,k35=1.0;
43、k36表示制动响应系数,当子编队中跟随车的驱动响应时间小于领头车的驱动响应时间时,k36=2.0,其余情况,k36=1.0;
44、s2.4根据子编队中第i辆车的实际情况计算出各车辆的制动分指标k4,i,
45、
46、其中,w7、w8表示权重系数;
47、k41表示驾驶员制动风格系数,当驾驶员是激进型制动风格时,k41=1.2,当驾驶员是中庸型制动风格时,k41=1.0,当驾驶员是平缓型制动风格时,k41=0.8;
48、k42表示交叉影响系数,当前车出现紧急情况制动时,k42=2.0,其余情况,k42=1.0;
49、k43表示制动响应系数,当子编队中跟随车的制动响应时间小于领头车的制动响应时间时,k43=2.0,其余情况,k43=1.0;
50、k44表示制动干扰系数,当编队行驶过程中有外来车辆介入干扰时,对于行驶在外来车辆后面的商用车,k44=1.5,其余情况,k44=1.0;
51、k45表示驱动系统维护系数,其值取决于距离上次维护制动系统的时间间隔tmain2、上次维护制动系统和下次维护制动系统之间的时间间隔tcyc2,当时,k45=1.3,当时,k45=1.0;
52、s3、分别计算子编队中第i辆车驱动和制动时的评价总参数;
53、s3.1根据下列公式计算出子编队中第i辆车的驱动力评价总参数kdrive,i,
54、
55、其中,α1、α2、α3为单项指标计算加权值;
56、s3.2根据下列公式计算子编队中第i辆车的制动减速度评价总参数kbrake,i,
57、
58、其中,β1、β2、β3为单项指标计算加权值;
59、驱动制动调节模块用于调节编队车辆行驶的驱动力和制动时的制动减速度,包括驱动力调节模块和制动减速度调节模块;
60、调节效能判定模块包括驱动力调节效能判定模块和制动减速度调节效能判定模块。
61、所述驱动力调节模块在子编队车辆制动后再次起步时开始工作,调节驱动力使子编队中编号i越大的车辆驱动力越大,当子编队两车辆之间的距离达到制动前的距离s1后停止工作,其中,
62、
63、其中,v1表示本车车速,vr1表示本车与后车的相对车速,a1表示本车的制动减速度,af1表示后车的制动减速度,t11表示本车驾驶员的反应时间,t21表示本车制动系统的反应时间,l01表示本车与后车的停车距离;
64、子编队各车辆的驱动力满足fdrive,1<fdrive,2<fdrive,3<fdrive,4;
65、
66、其中,i表示各子编队中的车辆按顺序从1到4的编号,fdrive,i表示各子编队中第i辆车在制动后起步的驱动力,kdrive,i表示子编队中第i辆车的驱动力评价总参数,fψ,i表示各子编队中第i辆车的道路阻力,包括滚动阻力和坡道阻力,fw,i表示各子编队中第i辆车辆的空气阻力,fj,i表示各子编队中第i辆车辆的加速阻力。
67、所述制动减速度调节模块在子编队车辆制动时开始工作,使子编队中编号i越大的车辆的制动制动减速度越大,保证各车辆安全制动,当车辆停止行驶之后,制动减速度调节模块停止工作;
68、子编队各车辆的制动减速度满足abrake,1<abrake,2<abrake,3<abrake,4
69、
70、其中,i表示各子编队中的车辆按顺序从1到4编号,abrake,1表示各子编队中第i辆车在制动后的制动减速度,kbrake,i表示子编队中第i辆车的制动减速度评价总参数,mi表示各子编队中第i辆车的整车质量,fx驱,i表示各子编队中第i辆车的地面纵向力,fx从,i表示各子编队中第i辆车的从动轮的地面纵向力,fw,i表示各子编队中第i辆车的空气阻力,fθ,i表示各子编队中第i辆车的坡道阻力。
71、所述驱动力调节效能判定模块用于检测驱动力调节模块的调节效果,包括驱动效能指标计算模块和驱动效能判定模块;
72、驱动效能指标计算模块用于计算驱动效能指标inddrive,
73、
74、strue表示在驱动力调节模块工作结束后,本车与后车距离的实际值;
75、sideal表示车辆未使用所述一种基于商用车编队的智能驱动制动结合系统时,本车与后车距离的理想值;
76、ttrue表示驱动力调节模块每次调节的实际工作时长;
77、tideal表示驱动力调节模块每次调节的理想工作时长;
78、驱动效能判定模块用于根据inddrive判断系统的调节效果:
79、当inddrive≤0.12时,所述一种基于商用车编队的智能驱动制动结合系统工作状态正常;
80、当inddrive>0.12时,所述一种基于商用车编队的智能驱动制动结合系统工作状态异常,编队停止使用所述一种基于商用车编队的智能驱动制动结合系统。
81、所述制动减速度调节效能判定模块用于检测制动减速度调节模块的调节效果,包括制动效能指标计算模块和制动效能判定模块;
82、制动效能指标计算模块用于计算制动效能指标indbrake,
83、
84、ltrue表示在制动调节模块工作结束后,本车与后车距离的实际值;
85、lideal表示车辆未使用所述一种基于商用车编队的智能驱动制动结合系统时,本车与后车距离的理想值;
86、ttrue表示制动减速度调节模块每次调节的实际工作时长;
87、tideal表示制动减速度调节模块每次调节的理想工作时长;
88、制动效能判定模块用于根据indbrake判断系统的调节效果:
89、当indbrake≤0.12时,所述一种基于商用车编队的智能驱动制动结合系统工作状态正常;
90、当indbrake>0.12时,所述一种基于商用车编队的智能驱动制动结合系统工作状态异常,编队停止使用所述一种基于商用车编队的智能驱动制动结合系统。
91、与现有技术相比,本发明的有益效果:
92、1、调节编队中越靠后的车辆在制动时的制动减速度越大,从而使其制动距离越短,提高商用车在制动时的安全性,保证车辆制动时有足够的制动距离;
93、2、在制动后起步时,使得编队中越靠后的车辆的驱动力越大,保证编队能恢复到制动之前的车辆间距,减少空气阻力,保证编队行驶的节能性;
94、3、本发明考虑将驱动情况和制动情况分开调节,保证行驶时安全性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!