一种基于红外技术的智能穿戴设备危险感知方法及系统与流程
本发明涉及危险警报,具体来说,涉及一种基于红外技术的智能穿戴设备危险感知方法及系统。
背景技术:
1、随着科技的日益发展,人们对个人安全的关注逐渐增强,尤其在某些特定环境下,如工地、野外或者夜间出行。为此,智能穿戴设备危险感知技术开始受到关注,其中,基于红外技术的方法尤为重要。
2、红外技术利用红外光的辐射特性来进行检测。与可见光相比,红外光的波长更长,通常在0.7-1000微米之间。红外光主要来源于物体的热辐射,因此它对于检测温度变化或热动体特别有效。在过去,人们主要依赖可见光摄像头、声音探测或者振动探测来进行安全检测。但这些方法在暗光或遮挡情况下效果不佳。例如,夜间或在浓雾中,传统摄像头的视野可能受到限制,而声音探测可能会受到环境噪音的干扰。红外技术能够在无光或低光条件下工作,因为它依赖的是物体发出的热辐射,而不是反射的光。这意味着,在夜间或浓雾等环境中,红外技术仍然可以有效检测。因此将红外技术应用至智能穿戴设备危险感知方法会带来很多好处。
3、现有的危险感知方法中,例如中国专利202210845661.9公开了一种融合多维信息的电力作业人员危险态势动态感知方法,其通过多个维度均可根据识别结果进行危险报警或态势感知预警,实现了对电力作业人员危险态势全面的动态感知预警,有效降低安全事故的发生概率。但是该方法还存在以下不足:对于野外的夜间环境下,为了行走的安全,需要对路径进行预先的规划,而现有的危险态势动态感知仅仅是对人员的状态进行识别,没有对环境的数据进行处理,且没有将环境中出现的危险因素变量来对用户进行预警并调整用户的路径规划。
4、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出一种基于红外技术的智能穿戴设备危险感知方法及系统,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
3、根据本发明的一个方面,提供了一种基于红外技术的智能穿戴设备危险感知方法,该方法包括以下步骤:
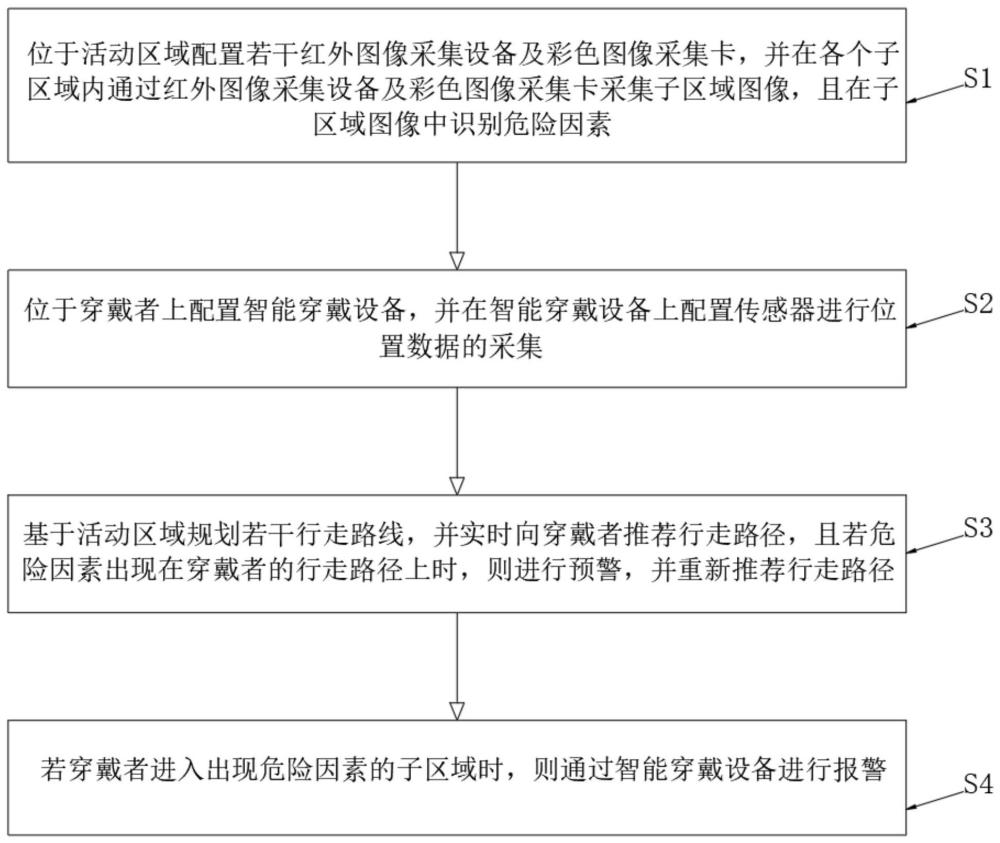
4、s1、位于活动区域配置若干红外图像采集设备及彩色图像采集卡,并在各个子区域内通过红外图像采集设备及彩色图像采集卡采集子区域图像,且在子区域图像中识别危险因素。
5、s2、位于穿戴者上配置智能穿戴设备,并在智能穿戴设备上配置传感器进行位置数据的采集。
6、s3、基于活动区域规划若干行走路线,并实时向穿戴者推荐行走路径,且若危险因素出现在穿戴者的行走路径上时,则进行预警,并重新推荐行走路径。
7、s4、若穿戴者进入出现危险因素的子区域时,则通过智能穿戴设备进行报警。
8、进一步的,所述位于活动区域配置若干红外图像采集设备及彩色图像采集卡,并在各个子区域内通过红外图像采集设备及彩色图像采集卡采集子区域图像,且在子区域图像中识别危险因素包括以下步骤:
9、s11、在各个子区域内,通过红外图像采集设备获取子区域内的红外热图像,且通过彩色图像采集卡获取子区域内的彩色图像;
10、s12、根据红外热图像的特性,利用均值法对温升区域进行特征提取,得到源图像特征图;
11、s13、利用源图像特征图计算梯度场融合权重,并使用高斯滤波的多尺度变换与图像梯度协方差相结合来获得红外热图像的结构特征;
12、s14、选择尺度因子;
13、s15、利用soft-max函数对红外热图像的边缘区域的梯度权重进行柔化,得出带有改进梯度权重的结构张量;
14、s16、根据变分技术与泊松方程求解得到重建图像;
15、s17、利用透明度法将彩色图像与重建图像融合得到子区域图像;
16、s18、利用图像处理技术提取子区域图像的特征,并根据特征建立历史数据;
17、s19、建立深度学习模型,并利用历史数据训练该深度学习模型,且将新的子区域图像的特征输入训练后的深度学习模型,并进行危险因素的检测。
18、进一步的,所述利用源图像特征图计算梯度场融合权重时,梯度场融合权重为:
19、
20、式中,sn表示第n个源图像的特征图;
21、sk表示第k个源图像的特征图;
22、n表示源图像的总数。
23、进一步的,所述选择尺度因子包括以下步骤:
24、s141、对红外热像图进行多尺度因子的比较分析;
25、s142、根据图像细节信息的丰富程度选择尺度因子。
26、进一步的,所述基于活动区域规划若干行走路线,并实时向穿戴者推荐行走路径,且若危险因素出现在穿戴者的行走路径上时,则进行预警,并重新推荐行走路径包括以下步骤:
27、s31、将活动区域的各个子区域作为图的节点,且将任意两个节点之间的道路作为图的边,并根据两点之间的距离、预计的通行时间及道路的拥挤程度给边赋予权重;
28、s32、实时更新边的权重;
29、s33、根据当前的图权重,且基于遗传算法获取从起点到终点的最优路径;
30、s34、若确定最优路径后,则通过无线传输的方式将最优路径实时发送到穿戴者的智能穿戴设备上,并提示穿戴者沿着最优路径行走;
31、s35、若穿戴者偏离了最优路径则重新计算最优路径,并更新推送给穿戴者;
32、s36、若危险因素出现在穿戴者的行走路径上的任意一条边上时,则进行预警,并降低该条边的权重,且重新计算最优路径,并更新推送给穿戴者。
33、进一步的,所述实时更新边的权重包括以下步骤:
34、s321、实时收集活动区域内的道路信息,并将道路信息分为正面信息和负面信息;
35、s322、若出现负面信息,则提高图中相应边的权重,且权重提高则代价提高。
36、进一步的,所述根据当前的图权重,且基于遗传算法获取从起点到终点的最优路径包括以下步骤:
37、s331、将行走的路径编码为染色体,且每个染色体表示一条路径;
38、s332、随机生成若干数量的染色体,并构成初代种群;
39、s333、根据图中边的权重计算每条路径的总代价;
40、s334、通过适应度函数并根据总代价评估每个染色体,且总代价越低,适应度越高;
41、s335、设置终止条件;
42、s336、若触发终止条件,则选择适应度最高的染色体,并解码为路径,同时推送给穿戴者的智能穿戴设备上。
43、进一步的,所述通过适应度函数并根据总代价评估每个染色体时,适应度函数为:
44、
45、式中,d表示每条路径的总代价;
46、ε表示除数为零的正数。
47、进一步的,所述若穿戴者进入出现危险因素的子区域时,则通过智能穿戴设备进行报警包括以下步骤:
48、s41、判断出现危险因素的时刻距离当前时刻的时间长度,若该时间长度小于预先设定的阈值,则判断该危险因素有效;
49、s42、若危险因素有效,则通过智能穿戴设备进行报警。
50、根据本发明的另一方面,提供了一种基于红外技术的智能穿戴设备危险感知系统,该系统包括图像采集模块、位置数据采集模块、路径预警模块及报警模块;
51、其中,所述图像采集模块及所述位置数据采集模块均与所述路径预警模块及所述报警模块连接。
52、所述图像采集模块,用于位于活动区域配置若干红外图像采集设备及彩色图像采集卡,并在各个子区域内通过红外图像采集设备及彩色图像采集卡采集子区域图像,且在子区域图像中识别危险因素。
53、所述位置数据采集模块,用于位于穿戴者上配置智能穿戴设备,并在智能穿戴设备上配置传感器进行位置数据的采集。
54、所述路径预警模块,用于基于活动区域规划若干行走路线,并实时向穿戴者推荐行走路径,且若危险因素出现在穿戴者的行走路径上时,则进行预警,并重新推荐行走路径。
55、所述报警模块,用于若穿戴者进入出现危险因素的子区域时,则通过智能穿戴设备进行报警。
56、本发明的有益效果为:
57、(1)本发明提供的一种基于红外技术的智能穿戴设备危险感知方法及系统,解决了在野外夜间环境下行走的安全问题,特别是针对那些可能存在的环境危险。本发明通过红外技术结合彩色图像技术,不仅可以在黑暗中捕获图像,而且可以根据温度差异和红外特征识别潜在的危险,且将彩色图像与重建图像融合得到子区域图像,使得每个子区域图像弥补了单纯的红外热像图缺乏细节信息的问题,这在野外环境中尤其有用,可以识别出动物、突出的障碍物或其他热源。
58、(2)本发明可以动态地为用户推荐最安全和最快的路径,同时在出现危险时及时重新规划路线,确保用户始终在最安全的路径上行走,且通过使用遗传算法,可以快速并高效地在多个可能的路径中找到最优解,这在变化多端的环境中具有高价值。当用户接近或进入危险区域时,智能穿戴设备会提供及时的预警,帮助用户避免潜在的风险。
- 还没有人留言评论。精彩留言会获得点赞!