通信有限条件下的多无人机协同感知避撞方法及装置
本发明涉及空中交通管理及无人机,具体涉及一种可以实现通信带宽有限条件下的高密度无人机协同安全飞行,满足通信资源受限环境下的空域持续安全稳定需求的通信有限条件下的多无人机协同感知避撞方法及装置。
背景技术:
1、近年来在电池、动力等技术进步的推动下,无人机(unmanned aircraft system,uas)性能不断提高,应用场景大幅度扩展,并逐步从物流、应急救援、农林牧渔等领域向全行业渗透。然而,有限空域环境下无人机飞行架次增多、飞行范围扩大、飞行时间延长将导致多无人机之间的飞行冲突频次增加,且多机连续冲突的概率将显著提升,进一步加剧了空域运行态势的复杂性。为保证复杂空域环境下飞行活动的安全高效运行,亟需解决大规模无人机的协同无冲突航迹规划问题。
2、传统的无冲突航迹规划方法多采用地面集中式冲突管控方法,由管制人员集中生成满足安全间隔约束同时满足最小化机动代价目标函数的可行策略,具有较强的提前性。然而,无人机飞行动态性、临时性和自主性较强,集中式间隔管控方法将造成其飞行灵活性受限,且全局优化的计算复杂度随航空器数量呈指数级增长,难以满足多无人机高密度运行空域的高效求解需求。对此,由无人机个体承担主要冲突解脱责任、自主生成解脱机动策略的机载协同式冲突管控方法已成为未来无人机安全广泛运行的关键。但是,机载协同式管控需要无人机机载端在通信链路作用下实现多机间的协作效能,而目前的研究普遍没有考虑通信约束条件的影响。事实上,由于无人机机载设备体积较小,通信设备和通信系统自身存在通信带宽和传输功率有限的问题,将给无人机之间的通信造成很多限制,因此有必要研究通信约束条件下的多无人机协同感知避撞方法。
技术实现思路
1、本发明的目的在于提供一种确保无人机自主优化生成无冲突航迹,在降低多无人机协同过程中通信负担的同时,最大限度地减少机动代价和碰撞概率的通信有限条件下的多无人机协同感知避撞方法及装置,以解决上述背景技术中存在的至少一项技术问题。
2、为了实现上述目的,本发明采取了如下技术方案:
3、一方面,本发明提供一种通信有限条件下的多无人机协同感知避撞方法,包括:
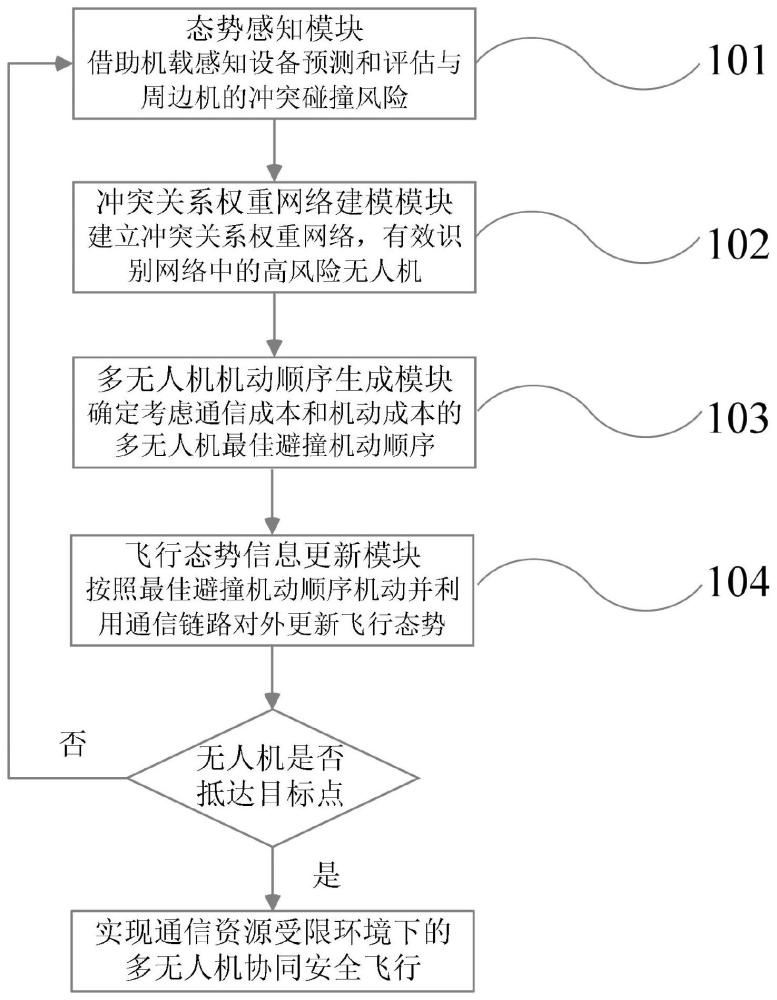
4、借助无人机机载感知设备进行态势感知,预测和评估与周边无人机的冲突碰撞风险;
5、建立冲突关系权重网络,有效识别网络中的高风险无人机;
6、结合冲突关系权重网络提供的高风险无人机先验信息,确定考虑通信成本和机动成本的多无人机最佳避撞机动顺序;
7、按照最佳避撞机动顺序有序机动,并利用通信链路对外更新飞行态势。
8、进一步的,借助无人机机载感知设备进行态势感知,预测和评估与周边无人机的冲突碰撞风险,包括:对周边无人机在空域中的飞行态势信息进行计算,并预测是否存在冲突碰撞风险;其中,若两机之间的最接近距离小于给定的安全间隔约束rsafe,即则认为两机之间存在冲突可能;为无人机a和无人机b之间的相对位置矢量,是两机之间的相对速度矢量,是两机之间的最接近距离,满足
9、进一步的,建立冲突关系权重网络,有效识别网络中的高风险无人机,包括:
10、(1)计算冲突无人机之间的冲突发生时间tcpa,若冲突发生时间在时间阈值to范围内,则进入步骤(2);
11、(2)对多无人机之间的冲突发生时间tcpa,ij进行归一化处理,量化得到无人机i和无人机j之间的冲突关系权重wij;
12、(3)构建多无人机冲突关系权重网络g,若无人机i和无人机j之间的冲突关系权重wij>0,则g中节点i和节点j建立连边;
13、(4)计算无人机冲突风险程度φi,并按冲突风险程度由高到低排序。
14、进一步的,结合冲突关系权重网络提供的高风险无人机先验信息,确定考虑通信成本和机动成本的多无人机最佳避撞机动顺序,包括:建立多机机动顺序同时满足安全性和经济性要求的效用函数;利用冲突关系权重网络中的高冲突风险无人机作为先验信息,使用遗传算法并行搜索,求得最小化效用函数的最佳多机机动顺序;其中,
15、效用函数为:
16、
17、其中,效用函数由三部分组成,devi为机动顺序为i的无人机机动代价,和分别为无人机的避撞速度矢量和原始速度矢量;confi为无人机机动后的冲突数,confi=∑j≠irij,若无人机与机动顺序为j的无人机仍存在冲突,则rij=1,反之为0;comi为无人机更新信息所需的通信代价,若无人机采取避撞机动,即则需对外更新速度态势,comi=1,反之为0;c1、c2、c3为预定义的惩罚因子。
18、进一步的,利用冲突关系权重网络中的高冲突风险无人机作为先验信息,使用遗传算法并行搜索,求得最小化效用函数的最佳多机机动顺序optseq,包括:
19、种群初始化:按照无人机冲突风险程度φi由高到低排序,生成初代染色体pop0(p1);为保证种群多样性,对pop0(p1)进行先验知识引导下的种群初始化,生成其他(n-1)个初代染色体pop0(pm)←f(pop0(p1),sij),m=2,...,n;其中,sij为染色体pop0(p1)基因位i和基因位j的交换函数:
20、
21、其中;λij为[0,1]的随机数;
22、遗传操作:采用轮盘赌的方式产生父代染色体,以概率pcrossover选择参加交叉的个体,并用两点交叉算子进行操作;以概率pmutate选择参加变异的个体,随机选择个体中的两个基因位点,进行交换基因;
23、重复迭代:判断是否达到终止条件,若未达到则重复操作,否则输出最佳染色体。
24、第二方面,本发明提供一种通信有限条件下的多无人机协同感知避撞装置,包括:
25、态势感知模块,用于借助无人机机载感知设备进行态势感知,预测和评估与周边无人机的冲突碰撞风险;
26、网络建模模块,用于建立冲突关系权重网络,有效识别网络中的高风险无人机;
27、顺序求解模块,用于结合冲突关系权重网络提供的高风险无人机先验信息,确定考虑通信成本和机动成本的多无人机最佳避撞机动顺序;
28、机动更新模块,用于按照最佳避撞机动顺序有序机动,并利用通信链路对外更新飞行态势。
29、进一步的,所述的态势感知模块包括态势数据获取单元和冲突碰撞风险探测单元;其中,态势数据获取单元用于采集飞行态势信息;冲突碰撞风险探测单元用于预测无人机之间间隔距离是否小于安全间隔标准。
30、进一步的,所述的网络建模模块包括冲突发生时间计算单元、冲突权重量化单元、连边生成单元和风险排序单元;冲突发生时间计算单元用于获得冲突无人机之间的最接近时间;冲突权重量化单元用于表征多无人机的冲突权重;连边生成单元用于构建无人机冲突关系权重网络连边;风险排序单元用于筛选高冲突风险无人机。
31、进一步的,所述的顺序求解模块包括效用函数定义单元、解空间搜索单元;效用函数定义单元用于衡量避撞机动顺序的经济性和安全性;解空间搜索单元用于结合高冲突风险无人机的先验信息生成最佳避撞机动顺序。
32、进一步的,所述的机动更新模块包括有序避撞机动单元和态势更新单元;有序避撞机动单元用于生成不与前序无人机二次冲突的最小偏移速度;态势更新单元用于实现无人机更新机动后的态势信息传递。
33、本发明有益效果:能够解决存在通信约束的多无人机协同无冲突航迹规划问题,确保空域内多无人机在通信资源有限的情况下借助通信协同实现避撞机动,最终在减少不必要的通信的前提下到达预期目标点,并避免飞行过程中的相互碰撞;通信有限条件下的多无人机协同感知避撞是指在保证多无人机之间的距离始终满足安全间隔约束(即无冲突)的同时,减少多机避撞机动更新飞行态势所需的通信资源使用。
34、本发明附加方面的优点,将在下述的描述部分中更加明显的给出,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!