一种有人和无人驾驶共存的机场摆渡车调度方法
本发明涉及车辆调度,尤其是指一种有人和无人驾驶共存的机场摆渡车调度方法。
背景技术:
1、随着航空交通运输的不断发展,机场的航班数量和频率不断增加,在有限时间内实现科学、高效的机场保障车辆调度成为亟需解决的重大现实问题。传统的地勤服务车辆调度技术主要依赖于人工调度和静态规划方法,但是人工调度一般是由调度员根据运输需求和车辆状态进行经验判断,会产生信息获取不完整、效率低、成本高的缺陷;静态规划通常采用规则和启发式算法进行路径规划,存在无法适应实时变化的交通和车辆状态的问题。
2、近年来,人工智能和自动化技术的加速发展使得基于规则和基于优化智能调度的方法逐步应用于机场车辆调度;当前,智慧机场的建设纳入了较多先进的技术,如无人驾驶技术和实时协同调度技术。机场飞行区域作为一个相对封闭的区域,空间构成确定、机场到面平坦、车辆速度不快,在此场景下对无人驾驶技术的落实具有一定的优势。结合实时协同调度技术,能够实现更高级别的自动化调度和协作,大大优化车辆调度、减小航班延误,提高民航服务质量以及经济效益。
3、目前,关于机场摆渡车调度的研究主要集中于各种运筹学方法,以期得到优化的摆渡车辆分配和调度方案,最大化其利用率。刘祎在2020年基于摆渡车服务流程、机场资源配置以及相关地面服务约束,以摆渡车转移距离最小、任务量均衡最佳和航班延误时间最小为目标建立多目标调度模型,并提出nsga-ⅱ与参数自适应策略和局部搜索策略相结合的预分配调度算法进行求解。吕宁在2022年研究机场摆渡车调度问题时将时间窗和多行程纳入考虑,建立混合整数规划模型并设计了相应的元启发式算法求解模型。沈卫明等在2023年公开了一种以进/出港航班摆渡服务拖期加权综合最小化为目标、基于变邻域搜索的机场摆渡车调度方法,该方法能够有效提升摆渡车的调度效率。目前,大多研究的关注点均为摆渡车本身的调度算法优化,往往忽视摆渡车的驾驶对象。白知恒等在2023年公开了一种基于人车分离的机场包堵车调度方法,不同于大多基于“人-车固定”模式的调度算法,该专利提出的调度方法将人员考虑进来,允许同一员工匹配多个车辆,通过提高人员轮转效率达到降低航班延误目的。随着5g通信、自动驾驶等新技术的快速发展,无人驾驶摆渡车逐步出现。于晓冬等在2021年公开了一种用于机场的自动驾驶旅客摆渡车,有效应对人工驾驶车辆交通事故发生率高的问题,并公开了一种自动驾驶旅客摆渡车的管控方法,将车路云一体化控制技术应用于机场当中,保障了摆渡服务的安全性、高效性和可控性。
4、以上现有机场摆渡车的调度技术均是仅考虑了纯有人驾驶或者纯无人驾驶的情况,但随着无人驾驶摆渡车的出现,在未来很长一段时间内势必是有人驾驶车辆和无人驾驶车辆共存的新场景,在这种新场景下如何高效调度有人驾驶和无人驾驶摆渡车成为急需解决的现实需求。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中未考虑有人驾驶摆渡车和无人驾驶摆渡车同时存在时的调度情况问题;未考虑只使用有人驾驶摆渡车和只使用无人驾驶摆渡车的情况;未考虑有人驾驶摆渡车和无人驾驶摆渡车之间的具体安全间距问题。
2、为解决上述技术问题,本发明提供了一种有人和无人驾驶共存的机场摆渡车调度方法,包括:
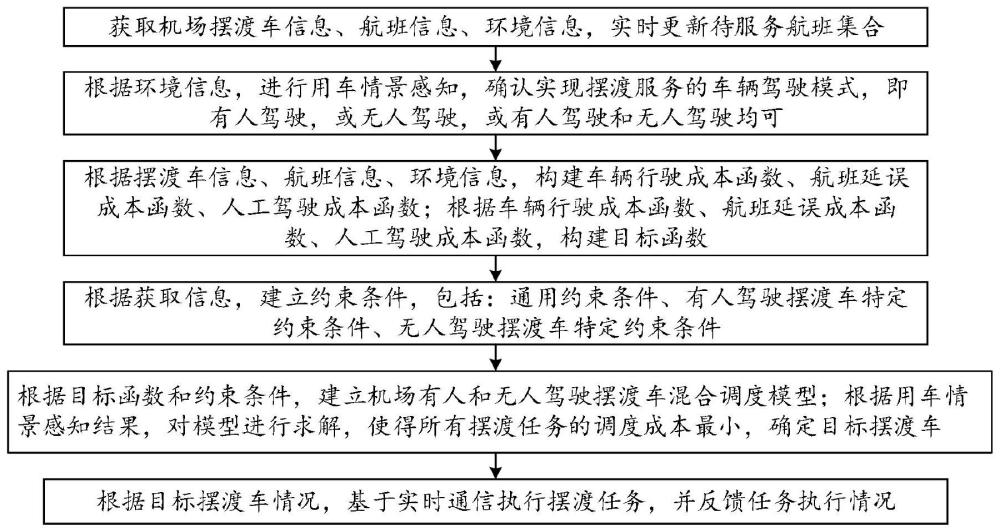
3、获取机场摆渡车信息、航班信息、环境信息,实时更新待服务航班集合;
4、根据环境信息,进行用车情景感知,确认实现摆渡服务的车辆驾驶模式,即有人驾驶、无人驾驶、有人驾驶和无人驾驶均可;
5、根据摆渡车信息、航班信息,确定决策变量,结合环境信息,构建车辆行驶成本函数;根据航班信息、环境信息,设置惩罚系数,创建时间窗惩罚函数,结合决策变量,构建航班延误成本函数;获取雇佣驾驶员的成本,构建人工驾驶成本函数;根据车辆行驶成本、航班延误成本和人工驾驶成本函数,构建目标函数;
6、根据获取信息,建立约束条件,包括:设置当前服务航班所需要的摆渡服务时间;根据环境信息,获取摆渡车从服务当前航班至服务下一趟航班任务之间的转移距离,结合当前摆渡车行驶速度,计算得出当前摆渡车行驶转移距离所需的行驶时间;同时根据航班信息,获取其中当前摆渡车开始服务当前航班的时间,以及当前摆渡车开始服务下一趟航班的时间,建立通用约束条件;
7、从摆渡车信息中获取有人驾驶摆渡车信息,根据其中有人驾驶摆渡车最大数量,有人驾驶摆渡车行驶速度和其行驶最大速度,以及有人驾驶摆渡车的最大工作时长,同时设置此时摆渡车完整服务当前航班的时长,且确定摆渡车是否首次从停放处驶出,建立有人驾驶摆渡车特定约束条件;
8、从摆渡车信息中获取无人驾驶摆渡车信息,根据其中无人驾驶摆渡车最大数量,无人驾驶摆渡车行驶速度和其行驶最大速度,同时确定摆渡车是否首次从停放车处驶出,建立无人驾驶摆渡车特定约束条件;
9、根据目标函数和约束条件,建立机场有人和无人驾驶摆渡车混合调度模型;根据用车情景感知结果,对模型进行求解,使得所有摆渡任务的调度成本最小,确定目标摆渡车;
10、根据目标摆渡车情况,基于实时通信执行摆渡任务,并反馈任务执行情况;其中,对于任意时间任意两辆摆渡车必须满足:同一时刻,前一辆摆渡车的位置与后一辆摆渡车的位置之差大于等于摆渡车车长和最小安全间距。
11、在本发明的一个实施例中,所述机场摆渡车信息、航班信息、环境信息包括:
12、摆渡车信息包括摆渡车编号、摆渡车驾驶模式、有人驾驶摆渡车的最大工作时长、摆渡车行驶速度、摆渡车位置、摆渡车状态;其中,根据摆渡车编号形成对应的摆渡车集合;
13、航班信息包括航班编号、航班服务类型、摆渡车服务开始时间、摆渡车服务结束时间、摆渡车服务开始地点、摆渡车服务结束地点;其中,根据航班编号形成对应的航班集合;
14、环境信息包括机场道路交通状况信息、地面道路状况、基础设施状况、气象状况、其他交通参与者的交通活动情况。
15、在本发明的一个实施例中,所述根据环境信息,进行用车情景感知,确认实现摆渡服务的车辆驾驶模式包括:
16、获取天气情报系统中的气象状况信息,包括:雨、风、冰、雪、雾,根据气象状况信息,建立综合安全指标体系,并计算相应的安全风险值,对有人和无人驾驶摆渡车服务保障进行安全评估,当有人驾驶摆渡服务安全风险高于无人驾驶摆渡服务时,则判定当前用车情景为恶劣天气用车情景,设置当前用车情景为情景1;在此情景下,确定只启用无人驾驶摆渡车;
17、获取交通状况信息,包括事故用车、急救用车;根据交通状况信息的突发事件信息,人为对有人和无人驾驶摆渡服务保障进行需求判断,当无人驾驶摆渡车不具备解决能力时,则判定当前用车情景为突发事件用车情景,设置当前用车情景为情景2;在此情景下,确定只启用有人驾驶摆渡车;
18、不存在以上两种情景时,则判定当前用车情景为一般用车情景,设置当前用车情景为情景3;在此情景下,确定启用有人驾驶摆渡车和无人驾驶摆渡车均可。
19、在本发明的一个实施例中,所述根据摆渡车信息、航班信息,确定决策变量,结合环境信息,构建车辆行驶成本函数;根据航班信息、环境信息,设置惩罚系数,创建时间窗惩罚函数,结合决策变量,构建航班延误成本函数;获取雇佣驾驶员的成本,构建人工驾驶成本函数,包括:
20、在车辆行驶过程中,行驶成本与行驶路径相关,行驶路径包括有效服务距离和必要转移距离;当调度任务确定时,摆渡车的服务开始地点和结束地点会随之确定,即有效服务距离固定不变,仅需考虑必要转移距离;其中,根据环境信息获取必要转移距离;
21、根据摆渡车信息、航班信息,确定决策变量,其表示为
22、
23、其中,当摆渡车s服务航班f时取1,否则取0;
24、根据获得的摆渡车集合、航班集合、摆渡车的服务开始地点和结束地点、决策变量,考虑行驶路径中必要转移距离,构建车辆行驶成本fdis,其函数公式为
25、
26、其中,f,l,i为航班编号;h为待服务航班集合;df,l为摆渡车在服务完航班f后紧接着服务航班l的转移距离;s为摆渡车编号;s为摆渡车集合;d0,l为摆渡车从停放点到航班l的转移距离;为决策变量;yf,l为0-1变量,当摆渡车先服务完航班f后紧接着服务航班l时,yf,l取1,否则取0,其表示如下:
27、
28、式中,分别表示为对应航班f,l,i的决策变量,在摆渡车s先后服务航班f和l并且这两个任务相紧连时取1,否则取0;f<i<l代表航班i的服务开始时间处于航班f和l之间;即当在航班f和l之间,存在任意一个航班i,且摆渡车s服务航班i,则表示此时摆渡车s先后服务航班f和l,但是两个服务任务不相连;当在航班f和l之间,没有存在航班i或者存在航班i,但摆渡车s服务航班i,则表示此时摆渡车s先后服务航班f和l,且这两个任务紧密相连;
29、在航班延误方面,无论是有人驾驶摆渡车还是无人驾驶摆渡车,航班延误成本与车辆到达时间和规定的服务时间之间的差距相关;
30、根据航班信息、环境信息中的交通状况信息,同时考虑乘客需求,获取摆渡车到达最早时间以及最晚时间;设置早到惩罚系数、晚到惩罚系数,创建时间窗惩罚函数ws,f,其定义如下:
31、
32、其中,w为早到惩罚系数,n为晚到惩罚系数,df为摆渡车s服务航班f时的实际到达时间,af为摆渡车到达的最早时间,bf为摆渡车到达的最晚时间;
33、根据决策变量、时间窗函数,构建航班延误成本fdel,其公式为
34、
35、其中,ws,f为时间窗惩罚函数,为决策变量;
36、在考虑人工驾驶成本时,即是在考虑有人驾驶摆渡车产生的人工成本;当无人驾驶摆渡车时,不需要考虑人工驾驶成本;则根据雇佣驾驶员成本,构建人工驾驶成本函数fman,其公式为
37、
38、其中,r表示雇佣驾驶员的成本;为0-1变量,当处于使用有人驾驶摆渡车的情况时取1,否则取0。
39、在本发明的一个实施例中,所述构建目标函数包括:
40、考虑车辆行驶成本、航班延误成本和人工驾驶成本,构建目标函数f:
41、f=minαfdis+βfdel+γfman
42、其中,fdis表示车辆行驶成本函数;fdel表示航班延误成本函数,fman表示人工驾驶成本函数;α、β、γ为调节变量。
43、在本发明的一个实施例中,所述根据获取信息,建立约束条件包括:
44、根据机场服务水平因素,设置当前航班所需要的摆渡服务时间;根据环境信息,获取摆渡车从服务当前航班至服务下一趟航班任务之间的转移距离,结合当前摆渡车行驶速度,计算得出当前摆渡车需要的行驶时间,其中,行驶速度默认取最大行驶速度;同时根据航班信息,获取其中当前摆渡车开始服务当前航班的时间,以及当前摆渡车开始服务下一趟航班的时间,建立通用约束条件,其表示为
45、
46、
47、其中,为摆渡车s开始服务航班f的时间;tf为航班f所需要的摆渡服务时间;tf,l为从航班f任务到航班l任务的行驶时间,为摆渡车s开始服务航班l的时间;表示每个航班摆渡任务有且仅有一次被摆渡车服务;保证了紧相连服务的两个航班之间留有服务时间和转移时间;
48、从摆渡车信息中获取有人驾驶摆渡车信息,根据其中有人驾驶摆渡车最大数量,有人驾驶摆渡车行驶速度和其行驶最大速度,以及有人驾驶摆渡车的最大工作时长,结合此时摆渡车完整服务当前航班的时长,同时确定摆渡车是否首次从停放处驶出,建立有人驾驶摆渡车特定约束条件,其表示为
49、
50、0≤vm≤vm,max
51、
52、其中,m为有人驾驶摆渡车集合;y0,s为0-1变量,当摆渡车s首次从停放处驶出时取1,否则取0;qm,max为有人驾驶摆渡车最大数量,即摆渡车集合中所有的有人驾驶摆渡车数量;vm为有人驾驶摆渡车行驶速度;vm,max为有人驾驶摆渡车行驶最大速度;es为摆渡车s服务的航班集合;为摆渡车s完整服务航班的时长;lm为驾驶员能接受的最大工作时长;其中,摆渡车完整服务航班的时长与所述航班所需要的摆渡服务时间一致;∑s∈sy0,s≤qm,max表示从停车场处出来的有人驾驶摆渡车数量不超过现有车辆的最大数量;0≤vm≤vm,max保证了车辆速度在有人驾驶下行驶速度的可接受范围内;表示摆渡服务时间在驾驶员能接受的最大工作时长内;
53、从摆渡车信息中获取无人驾驶摆渡车信息,根据其中无人驾驶摆渡车最大数量,无人驾驶摆渡车行驶速度和其行驶最大速度,同时确定摆渡车是否首次从停放车驶出,建立无人驾驶摆渡车特定约束条件,其表示为
54、
55、0≤vu≤vu,max
56、其中,u为无人驾驶摆渡车集合;y0,s为0-1变量,当摆渡车s首次从停放处驶出时取1,否则取0;qu,max为无人驾驶摆渡车最大数量,即摆渡车集合中所有的无人驾驶摆渡车数量;vu为无人驾驶摆渡车行驶速度;vu,max为无人驾驶摆渡车行驶最大速度;∑s∈uy0,s≤qu,max表示从停车场处出来的无人驾驶摆渡车数量不超过现有车辆的最大数量;0≤vu≤vu,max保证了车辆速度在无人驾驶下行驶速度的可接受范围内。
57、在本发明的一个实施例中,所述根据用车情景感知结果,对模型进行求解,使得所有摆渡任务的调度成本最小,确定目标摆渡车包括:
58、若机场有m辆有人驾驶摆渡车和u辆无人驾驶摆渡车,nf次远机位航班需要被摆渡车服务,为待摆渡服务的每航班分配一辆摆渡车,使得所有摆渡任务的调度成本最小;
59、当处于情景1时,则确定使用无人驾驶摆渡车,即s=u,通过对模型进行求解,确定目标无人驾驶摆渡车;
60、当处于情景2时,则确定使用有人驾驶摆渡车,即s=m,通过对模型进行求解,确定目标有人驾驶摆渡车;
61、当处于情景3时,则确定使用有人驾驶摆渡车和无人驾驶摆渡车均可,即s=u∪m,通过对模型进行求解,确定目标无人驾驶摆渡车或者目标有人驾驶摆渡车。
62、在本发明的一个实施例中,所述根据目标摆渡车情况,基于实时通信执行摆渡任务,并反馈任务执行情况,包括:
63、当确定调度车辆为无人驾驶摆渡车时,则由调度平台下发路径规划结果给目标无人驾驶摆渡车,车辆自行启动并按照路径执行任务,在行驶过程中,通过车载雷达或者相机实时检测周边状况,并反馈给调度平台;
64、当确定调度车辆为有人驾驶摆渡车时,则由调度平台下发路径规划结果给驾驶员,驾驶员启动车辆并按照路径执行任务,在行驶过程中,通过通信设备实时保持与调度平台的联系;
65、通过通信模块,实现所有摆渡车的实时位置共享和实时交通信息共享;其中,对于任意时间任意两辆摆渡车必须满足条件:
66、xf(t)-xl(t+τl)≥l+d
67、式中,xf(t)为前一辆摆渡车时刻t的位置,xl(t+τl)为后一辆摆渡车时刻t的位置,τl为摆渡车l的感知和反应时间,l为摆渡车车长,d为最小安全间距;
68、当后一辆摆渡车为有人驾驶摆渡车时,τl=τm,τm为有人驾驶摆渡车感知和反应时间;当后一辆摆渡车为无人驾驶摆渡车时,τl=τu,τu为无人驾驶摆渡车感知和反应时间;显然,τm>τu。
69、当不满足条件时,由后一辆摆渡车进行速度调整,若为无人驾驶摆渡车则自行感知进行减速,若为有人驾驶摆渡车则由调度平台发出警告给驾驶员,驾驶员进行减速。
70、本发明还提供了一种有人和无人驾驶共存的机场摆渡车调度系统,包括:
71、信息获取模块:用于实时获取摆渡车信息、航班信息和环境信息
72、摆渡车调度平台:用于根据信息模块获取模块信息,通过机场有人和无人驾驶摆渡车回合调度模型确定执行摆渡任务的目标摆渡车,并且实时监控摆渡车的运行;
73、通信模块:用于有人驾驶摆渡车之间、无人驾驶摆渡车之间、有人驾驶摆渡车和无人驾驶摆渡车之间、摆渡车与调度平台之间的实时通信,包括无线通信设备、移动通信设备、gps装置;
74、摆渡车:用于执行调度任务,分为有人驾驶摆渡车和无人驾驶摆渡车;其中,有人驾驶摆渡车只发送自身车辆信息;无人驾驶摆渡车搭载obu,其通过车路协同v2x通信实现直接连接,可发送自身车辆信息并获取其他车辆信息,包括位置、速度和加速度、所处路况、运行历史数据的信息。
75、本发明还提供一种有人和无人驾驶共存的机场摆渡车调度设备,包括:
76、存储器,用于存储计算机程序;
77、处理器,用于执行所述计算机程序时实现如权利要求1至8任一所述一种有人和无人驾驶共存的机场摆渡车调度方法的步骤。
78、本发明的上述技术方案相比现有技术具有以下优点:
79、(1)本发明所述的一种有人和无人驾驶共存的机场摆渡车调度方法,充分考虑了机场摆渡车的发展现状以及未来发展趋势,通过车路协同、实时通信、优化混合调度,完善从传统机场环境到完全无人机场环境的过渡阶段;提出的有人和无人驾驶共存的机场摆渡车调度方法能够有效应对目前机场新场景,切合实际地最大程度安全、高效、可控实现摆渡车调度,减少航班延误率和事故发生率,优化机场地面保障服务效率,推动四型机场的智能化发展;
80、(2)本发明所述的一种有人和无人驾驶共存的机场摆渡车调度方法,在构建机场有人和无人驾驶摆渡车混合调度模型之前,先进行用车情景感知,充分考虑只使用有人驾驶摆渡车和只使用无人驾驶摆渡车的特殊情景,具有一定的特殊情况应急能力,更加符合实际情况,增强了实用性
81、(3)本发明所述的一种有人和无人驾驶共存的机场摆渡车调度方法,构建了机场有人和无人驾驶摆渡车混合调度模型,该模型充分考虑了有人驾驶摆渡车特定约束和无人驾驶摆渡车特定约束,将两种驾驶模式的摆渡车区别开来,实现更加符合现实情况的混合调度,充分发挥有人驾驶摆渡车和无人驾驶摆渡车各自的特长,提高整体调度效益;
82、(4)本发明所述的一种有人和无人驾驶共存的机场摆渡车调度方法,在目标摆渡车执行摆渡任务时充分讨论有人驾驶摆渡车和无人驾驶摆渡车基于实时通信的相邻两车间距,进一步提高车辆之间的运行安全性。
- 还没有人留言评论。精彩留言会获得点赞!