一种智慧停车用车身姿态检测装置的制作方法
本发明属于智慧停车,具体而言,涉及一种智慧停车用车身姿态检测装置。
背景技术:
1、车辆停放问题是随着城市化发展迅速崛起的一个难题。随着机动车数量的不断增加,司机在停车时面临着各种困难。在城市狭窄的道路和有限的停车位条件下,司机在停车时往往难以确保车身停放在规定的位置。同时,司机开车技术参差不齐,停车位置有所不同,可能会出现前后左右相对于标准停车位置侧偏问题,比如偏左或偏前,或者出现歪斜问题,即车辆的对称轴线在水平面内与前后方向呈一定夹角,导致自主导航车无法顺利运行。车身不正压线可能涉及到车辆超越停车线、斜停、横穿停车位等情况,这不仅影响了交通流畅,也增加了其他驾驶员寻找合适停车位的难度。
2、在一些大型城市的繁华地带,当地的停车场常常应用智能停车系统为司机提供实时的停车引导,智能停车系统包括各种传感器,如地面感应器、摄像头、红外线传感器等,以监测停车位的占用情况,其中主要通过摄像头来停车场的环境。智能停车系统中的大多数摄像头都是固定在同一地方的,固定在一个地方的摄像头只能对一个方向的图像进行监测,只有一个方向的监测可能无法提供全方位的信息,尤其是在需要同时监测多个方向或角度的情况下。不可移动的摄像头可能无法覆盖到某些区域,导致盲区和死角的存在,这样不利于对车身状态的监控。
3、综上所述,现有的智慧停车系统存在不能从多方位观察周边环境,容易出现视野盲区的问题。
技术实现思路
1、有鉴于此,本发明提供了一种智慧停车用车身姿态检测装置,能够解决现有的智慧停车系统存在的不能从多方位观察周边环境,容易出现视野盲区的问题。
2、本发明是这样实现的:
3、本发明提供一种智慧停车用车身姿态检测装置,其中,包括惯性测量单元、磁力计单元以及视觉传感器单元,所述惯性测量单元以及所述磁力计单元设置在车辆上,所述惯性测量单元用于测量车辆的线性加速度和角速度,所述磁力计单元用于确定车辆的方向;所述视觉传感器单元通过旋转支架固定在所述智慧停车场的车位后方,用于实时对车辆的运行环境进行监测;该智慧停车用车身姿态检测装置还包括有信号传输单元,所述信号传输单元与车载蓝牙电连接,所述信号传输单元用于将所述惯性测量单元、所述磁力计单元以及所述视觉传感器单元得到的信号传输到车辆中。
4、本发明提供的一种智慧停车用车身姿态检测装置的技术效果如下:惯性单元中的加速计能够测量车辆的加速度,惯性单元中的陀螺仪能够测量车辆的角速度,通过设置惯性测量单元能够测得车辆姿态信息包括车辆的倾斜旋转和方向,并能够跟踪车辆的运动;通过设置磁力计单元,能够对车辆进行导航和定位,以便更好的确定车辆的位置信息;通过设置视觉传感单元,能够实时捕获周围环境的图像或视频,为车辆提供全方位的环境感知能力,也能够识别停车位上的标线、边界和车道,从而对停车进行辅助。
5、在上述技术方案的基础上,本发明的一种智慧停车用车身姿态检测装置还可以做如下改进:
6、其中,所述视觉传感器单元包括图像采集单元以及数据分析终端,所述图像采集单元为摄像头,所述摄像头在所述旋转支架的带动下用于对所述车辆周围的环境进行全方位图像监测;所述图像采集单元与所述数据分析终端之间通过蓝牙传输单元连接,所述蓝牙传输单元用于将所述图像采集单元采集的数据传输到所述数据分析终端中,所述数据分析终端包括图像拼合模块、图像预处理模块、线条分析模块以及数据处理模块,
7、所述图像拼合模块用于将所述图像采集单元采集的多方位图像进行拼合;
8、所述图像预处理模块用于将所述图像拼合模块拼合的图像进行降噪、锐化、去除杂质的预处理;
9、所述线条分析模块用于将所述图像预处理模块预处理的图像进行线条分析;
10、所述数据处理单元用于将所述线条分析模块分析的图像数据进行整合处理,并将其通过信号传输单元传输到所述车载蓝牙中。
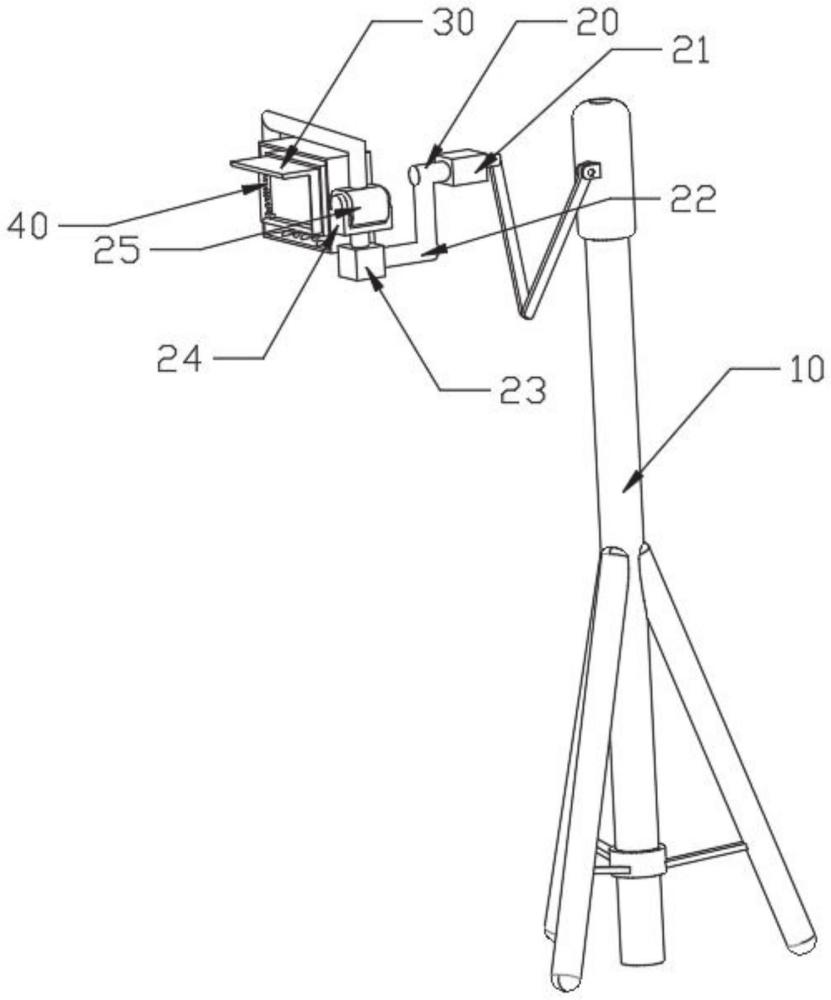
11、进一步的,所述旋转支架包括支杆、360°旋转轴、摄像机固定架以及清洁机构,所述支杆固定在智慧停车场的每个停车位后方,所述支杆的顶部固定有所述360°旋转轴,所述摄像机固定架的一端与所述360°旋转轴固定连接,所述360°旋转轴用于带动所述摄像机固定架以所述支杆的顶部为转轴全方位旋转,所述摄像机固定在所述摄像机固定架的内部,所述摄像机固定架用于带动所述摄像机旋转并对其进行保护;所述摄像机固定架的顶部设置有所述清洁机构,所述清洁机构用于对所述摄像机的表面进行清洁。
12、采用上述改进方案的有益效果为:通过设置支杆,能够将摄像机抬高,从而扩大其视野范围,有利于监测更广泛的道路环境,提高图像采集的效果;通过设置360°旋转轴,能够带动摄像头实现360°全方位监控,从而覆盖更广泛的图像采集区域实现不同的检测需求,也能够有效减小盲区,从而提高摄像头对于图像采集的完整性和准确性;通过设置摄像机固定架,能够降低大风对于摄像头的影响,避免摄像头采集的图像模糊或者抖动,也能够避免摄像头在大风天气发生剧烈摇晃从而发生坠落影响下方车辆的安全。
13、进一步的,所述360°旋转轴包括平移轴电机,所述平移轴电机的一端通过折叠杆固定在所述支杆的顶部位置,所述平移轴电机的输出轴与所述折叠杆固定连接;所述平移轴电机的底部固定有第一转动臂,所述第一转动臂的另一端固定连接有横滚轴电机,所述横滚轴电机的输出轴上连接有u型架,所述u型架的一端设置有俯仰轴电机,所述俯仰轴电机的一端设置有固定轴;所述摄像机固定架为长方形,所述摄像机固定架的两个侧壁上开设有通孔,其中一个所述通孔与所述俯仰轴电机的转动轴连接,另一个所述通孔与所述固定轴连接,所述平移轴电机、第一转动臂、横滚轴电机以及所述俯仰轴电机用于带动所述摄像机固定架以及固定在所述摄像机固定架中的摄像机在三个方向上的转动,其中,所述平移轴电机用于带动所述摄像机固定架以及固定在所述摄像机固定架中的摄像机绕所述平移轴电机的中轴线转动,所述横滚轴电机用于带动所述摄像机固定架以及固定在所述摄像机固定架中的摄像机绕所述横滚轴电机的中轴线转动,所述俯仰轴电机用于带动所述摄像机固定架以及固定在所述摄像机固定架中的摄像机绕所述俯仰轴电机的中轴线转动。
14、进一步的,所述平移轴电机、所述横滚轴电机以及所述俯仰轴电机相互垂直。
15、进一步的,所述摄像机固定架包括固定框,所述固定框内壁的大小与所述摄像机的大小相同,所述固定框的顶盖向所述摄像头镜头的方向延伸6-10cm,用于为所述摄像头挡住灰尘和雨水;所述固定框的外壁边角为圆滑形,用于保护其内部放置的所述摄像机,所述固定框的外部设置有防风环,所述防风环与所述固定框的外壁固定连接;
16、所述防风环包括固定环以及特斯拉阀,所述固定环固定在所述固定框的外壁,所述特斯拉阀为多个,分别固定在所述固定环的内部,所述特斯拉阀用于减轻风对所述摄像机固定架带来的晃动。
17、采用上述改进方案的有益效果为:通过设置防风环,能够利用特斯拉阀的特性使风单向流动,通过特斯拉阀本身的空间结构推动气体流动并对气体进行加速,有助于减小风阻,使得空气更顺畅的流过摄像头的表面,避免风在摄像头周围出现乱流破坏摄像头的稳定性。
18、进一步的,所述清洁机构包括刮板、橡胶垫以及驱动机构,所述刮板通过所述驱动机构固定在所述摄像机固定架的开口位置,所述橡胶垫固定在所述刮板的底部;所述驱动机构包括拉伸电机以及拉伸弹簧,所述拉伸电机设置在所述摄像机固定架的底部位置,所述拉伸弹簧包括两段,分别固定在所述拉伸电机与所述刮板,所述刮板与所述摄像机固定架的顶部内壁之间,所述拉伸电机用于带动所述拉伸弹簧连带所述刮板对摄像头进行清洁。
19、采用上述改进方案的有益效果为:通过设置清洁机构,能够对摄像头的表面进行清理,清除掉黏附在摄像头镜面上的灰尘或者水滴,避免摄像头拍摄的图像模糊或者失真,有利于提高图像的清晰度和成像质量;通过设置橡胶垫,能够避免刮板刮坏摄像头的镜面;通过设置驱动机构,能够为刮板的移动提供动力源,并且能够使刮板自动复位。
20、进一步的,所述刮板与所述摄像头的位置对齐,用于使得所述刮板紧贴所述摄像头并对所述摄像头进行清洁。
21、进一步的,所述图像拼合模块将所述图像采集单元采集的多方位图像进行拼合的具体步骤包括:
22、第一步,对采集到的图像进行校正,去除镜头畸变、调整亮度和对比度,以及对齐图像;
23、第二步,对图像进行特征提取,识别关键点、边缘;
24、第三步,利用特征提取的信息,对不同图像之间进行匹配;
25、第四步,在匹配的基础上,估计图像之间的几何变换;
26、第五步,利用估计的变换参数,将图像进行融合,分析不同图像之间的权重,以及过渡区域的处理,以确保拼合的自然过渡;
27、第六步,进行色彩校正、亮度平衡,用于提高最终拼合图像的质量;
28、第七步,生成全景图像。
29、进一步的,所述线条分析模块将所述图像预处理模块预处理的图像进行线条分析的具体步骤包括:
30、第一步,将图像进行二值化处理;
31、第二步,使用边缘检测算法,找到图像中的边缘;
32、第三步,对边缘图像进行去噪处理,以去除一些小的噪点;
33、第四步,对降噪后的图像进行霍夫变换将图像中的每个点映射到直线空间,然后通过查找在直线空间中明显聚集的区域来检测图像中的直线;
34、第五步,使用曲线检测算法在图像中提起曲线;
35、第六步,在图像中提取线条的参数,如起点、终点、长度、角度;
36、第七步,将图像中的线条进行连接,完成线条的提取分析。
37、与现有技术相比较,本发明提供的一种智慧停车用车身姿态检测装置的有益效果是:惯性单元中的加速计能够测量车辆的加速度,惯性单元中的陀螺仪能够测量车辆的角速度,通过设置惯性测量单元能够测得车辆姿态信息包括车辆的倾斜旋转和方向,并能够跟踪车辆的运动;通过设置磁力计单元,能够对车辆进行导航和定位,以便更好的确定车辆的位置信息;通过设置视觉传感单元,能够实时捕获周围环境的图像或视频,为车辆提供全方位的环境感知能力,也能够识别停车位上的标线、边界和车道,从而对停车进行辅助,通过设置支杆,能够将摄像机抬高,从而扩大其视野范围,有利于监测更广泛的道路环境,提高图像采集的效果;通过设置360°旋转轴,能够带动摄像头实现360°全方位监控,从而覆盖更广泛的图像采集区域实现不同的检测需求,也能够有效减小盲区,从而提高摄像头对于图像采集的完整性和准确性;通过设置摄像机固定架,能够降低大风对于摄像头的影响,避免摄像头采集的图像模糊或者抖动,也能够避免摄像头在大风天气发生剧烈摇晃从而发生坠落影响下方车辆的安全。
- 还没有人留言评论。精彩留言会获得点赞!