一种作业车辆的调度方法、装置及车辆调度系统与流程
本发明涉及车辆控制,具体涉及一种作业车辆的调度方法、装置及车辆调度系统。
背景技术:
1、随着自动驾驶技术的发展,电动车辆在自动驾驶系统中所占的比重越来越大。对于仓储系统中利用的自动驾驶电动车辆而言,车辆在未收到调度系统下发的搬运任务时,自动驾驶系统一直处于高功耗工作状态。以重卡园区无人叉车电池容量6.5度左右(270ah)为例,如果车辆空闲放置12小时计算,耗电量占总电量20%,对电池续航带来极大挑战。
技术实现思路
1、有鉴于此,本发明提供了一种作业车辆的调度方法、装置及车辆调度系统,以提高自动驾驶车辆的续航能力。
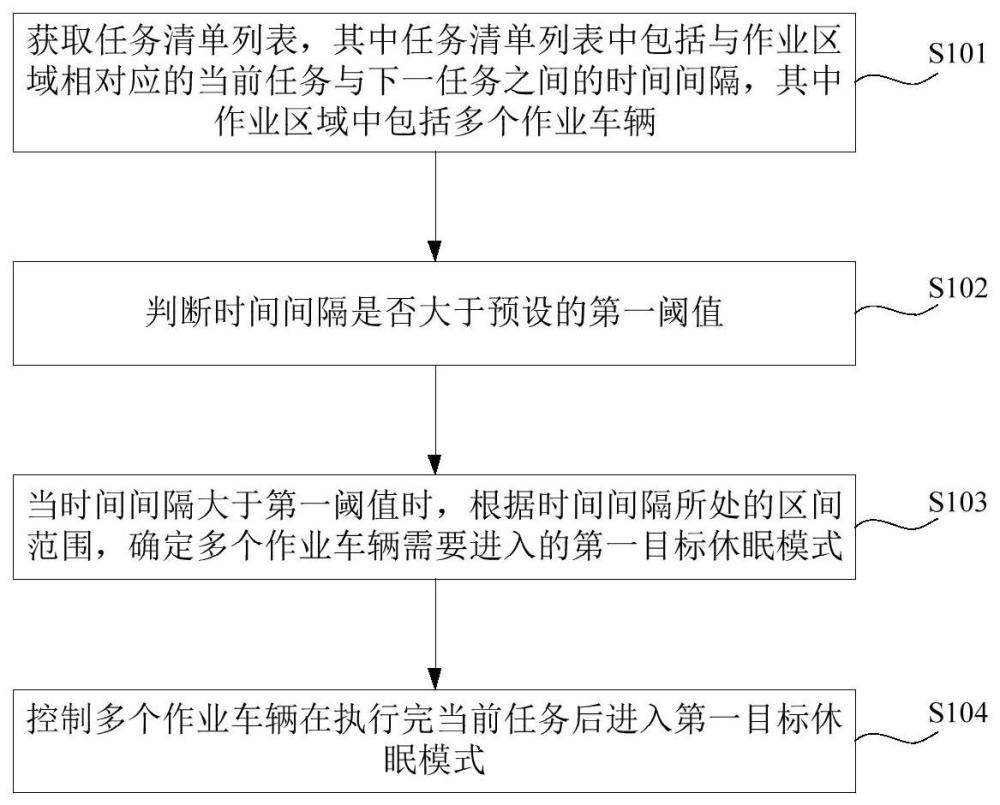
2、第一方面,本发明实施例提供了一种作业车辆的调度方法,应用于车辆调度系统,其中作业车辆的调度方法包括以下步骤:获取任务清单列表,其中任务清单列表中包括与作业区域相对应的当前任务与下一任务之间的时间间隔,其中作业区域中包括多个作业车辆;判断时间间隔是否大于预设的第一阈值;当时间间隔大于第一阈值时,根据时间间隔所处的区间范围,确定多个作业车辆需要进入的第一目标休眠模式;控制多个作业车辆在执行完当前任务后进入第一目标休眠模式。
3、本实施例提供的作业车辆的调度方法,通过获取任务清单列表,判断时间间隔是否大于预设的第一阈值;当时间间隔大于第一阈值时,根据时间间隔所处的区间范围,确定多个作业车辆需要进入的第一目标休眠模式;控制多个作业车辆在执行完当前任务后进入第一目标休眠模式;由此可以根据仓储系统中的任务清单列表,在某一作业区域中的作业车辆将要存在较长的空闲时间时,控制该作业区域中的所有作业车辆在执行完当前任务后进入第一目标休眠模式,由此可以提高自动驾驶车辆的续航能力。
4、在一种可选的实施方式中,根据时间间隔所处的区间范围,确定多个作业车辆需要进入的第一目标休眠模式包括:当时间间隔大于第一阈值且小于第二阈值时,将浅度休眠模式作为多个作业车辆需要进入的第一目标休眠模式;当时间间隔大于第二阈值且小于第三阈值时,将中度休眠模式作为多个作业车辆需要进入的第一目标休眠模式;当时间间隔大于第三阈值时,将深度休眠模式作为多个作业车辆需要进入的第一目标休眠模式;其中,第一阈值小于第二阈值,第二阈值小于第三阈值。
5、由此可以通过三级休眠,提高自动驾驶车辆续航能力的同时减少能源浪费,实现节能降本。
6、在一种可选的实施方式中,在获取任务清单列表之前,还包括以下步骤:判断车辆调度系统是否与仓储系统建立通信连接;当车辆调度系统与仓储系统建立通信连接时,获取仓储系统发送的任务清单列表。
7、由此可以保证获取到仓储系统发送的任务清单列表。
8、在一种可选的实施方式中,作业车辆的调度方法还包括以下步骤:当车辆调度系统未与仓储系统建立通信连接时,获取作业车辆发送的作业区域的图像信息;根据图像信息确定作业区域是否为空;当作业区域为空且作业区域中的所有作业车辆均为空闲状态时,开始计时,得到计时时长;根据计时时长所处的区间范围,确定多个作业车辆需要进入的第二目标休眠模式;控制多个作业车辆进入第二目标休眠模式。
9、由此可以在不能获取到仓储系统发送的任务清单列表时,通过图像信息来确定作业区域是否为空,并在作业区域为空的时间较长时,进入到第二目标休眠模式。
10、在一种可选的实施方式中,根据计时时长所处的区间范围,确定多个作业车辆需要进入的第二目标休眠模式包括:当计时时长达到预设的第四阈值时,将浅度休眠模式作为多个作业车辆需要进入的第二目标休眠模式;当计时时长达到预设的第五阈值时,将中度休眠模式作为多个作业车辆需要进入的第二目标休眠模式;计时时长达到预设的第六阈值时,将深度休眠模式作为多个作业车辆需要进入的第二目标休眠模式;其中,第四阈值小于第五阈值,第五阈值小于第六阈值。
11、由此可以通过三级休眠,提高自动驾驶车辆续航能力的同时减少能源浪费,实现节能降本。
12、在一种可选的实施方式中,在控制多个作业车辆在执行完当前任务后进入第一目标休眠模式或者控制多个作业车辆进入第二目标休眠模式之后,还包括:当接收到处理任务时,根据多个作业车辆所处的当前状态,确定多个作业车辆的唤醒方式;按照确定的唤醒方式对多个作业车辆进行唤醒。
13、由此可以对进入休眠模式的作业车辆进行唤醒。
14、在一种可选的实施方式中,根据多个作业车辆所处的当前状态,确定多个作业车辆的唤醒方式包括:当多个作业车辆所处的当前状态为浅度休眠模式时,控制多个作业车辆的传感器上电且启动业务模块;当多个作业车辆所处的当前状态为中度休眠模式时,在控制多个作业车辆的域控制器上电之后,控制多个作业车辆的传感器上电且启动业务模块;当多个作业车辆所处的当前状态为深度休眠模式时,在控制多个作业车辆的tda4上电之后,控制多个作业车辆的域控制器上电;在控制多个作业车辆的域控制器上电之后,控制多个作业车辆的传感器上电且启动业务模块。
15、由此可以对进入不同休眠模式的作业车辆采用不同的方式进行唤醒。
16、第二方面,本发明实施例还提供了一种仓储系统中自动驾驶系统休眠装置,装置包括第一获取模块、第一判断模块、第一目标休眠模式确定模块和第一控制模块;第一获取模块,用于获取任务清单列表,其中任务清单列表中包括与作业区域相对应的当前任务与下一任务之间的时间间隔,其中作业区域中包括多个作业车辆;第一判断模块,用于判断时间间隔是否大于预设的第一阈值;第一目标休眠模式确定模块,当时间间隔大于第一阈值时,用于根据时间间隔所处的区间范围,确定多个作业车辆需要进入的第一目标休眠模式;第一控制模块,用于控制多个作业车辆在执行完当前任务后进入第一目标休眠模式。
17、第三方面,本发明提供了一种车辆调度系统,包括存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的作业车辆的调度方法。
18、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的作业车辆的调度方法。
技术特征:
1.一种作业车辆的调度方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述时间间隔所处的区间范围,确定所述多个作业车辆需要进入的第一目标休眠模式包括:
3.根据权利要求1所述的方法,其特征在于,在获取任务清单列表之前,还包括:
4.根据权利要求3所述的方法,其特征在于,还包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述计时时长所处的区间范围,确定所述多个作业车辆需要进入的第二目标休眠模式包括:
6.根据权利要求4所述的方法,其特征在于,在控制所述多个作业车辆在执行完所述当前任务后进入所述第一目标休眠模式或者控制所述多个作业车辆进入所述第二目标休眠模式之后,还包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述多个作业车辆所处的当前状态,确定所述多个作业车辆的唤醒方式包括:
8.一种作业车辆的调度方法装置,其特征在于,所述装置包括:
9.一种车辆调度系统,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求1至7中任一项所述的作业车辆的调度方法。
技术总结
本发明涉及车辆控制技术领域,公开了一种作业车辆的调度方法、装置及车辆调度系统,其中作业车辆的调度方法包括以下步骤:获取任务清单列表,其中任务清单列表中包括与作业区域相对应的当前任务与下一任务之间的时间间隔,其中作业区域中包括多个作业车辆;判断时间间隔是否大于预设的第一阈值;当时间间隔大于第一阈值时,根据时间间隔所处的区间范围,确定多个作业车辆需要进入的第一目标休眠模式;控制多个作业车辆在执行完当前任务后进入第一目标休眠模式。由此可以提高自动驾驶车辆的续航能力。
技术研发人员:江奕辰,李纯袁,刘用龙
受保护的技术使用者:深圳海星智驾科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!