一种全方位自由度试验旋转平台的制作方法
本技术涉及报警探测器方位实验的,尤其涉及一种全方位自由度试验旋转平台。
背景技术:
1、根据国家标准gb15322.1.2.3-2019中的规定,对报警探测器需进行方位实验,在安装平面内进行顺时针旋转,防止因报警探测器安装方位角度不同,而引起报警探测器报警失效。因各个使用安装的方位不同,因而形成了x,y,z三个平面自由度的旋转。
2、目前采用的方位实验,有手动摆放、单面旋转等方法。在报警探测器方位实验的过程中,需要将报警探测器放置在一个密闭的空间内,将该密闭空间冲入报警气体,在报警气体存在的基础上进行方位实验。使用手动摆放方法是在实验前将报警探测器摆放一个方位,关闭密封空间的门后注气。该平面实验完毕后,要更换另一个平面就必须要打开密封空间后,再进行手动调整,那么就需要将已经充好的气体再次排空,x,y,z三个平面,每个平面做4个方位,需要做12个方位实验,就需要冲入12次气体,浪费了大量的气体和人力。而单面旋转法,只能在一个平面做4次方位实验,其他两个平面无法实验。
技术实现思路
1、基于以上现有技术的不足,本实用新型所解决的技术问题在于提供一种全方位自由度试验旋转平台,整个结构简单紧凑,占用空间小,能够实现定角度方位旋转,节省气体和人力,并满足报警探测器的方位实验。
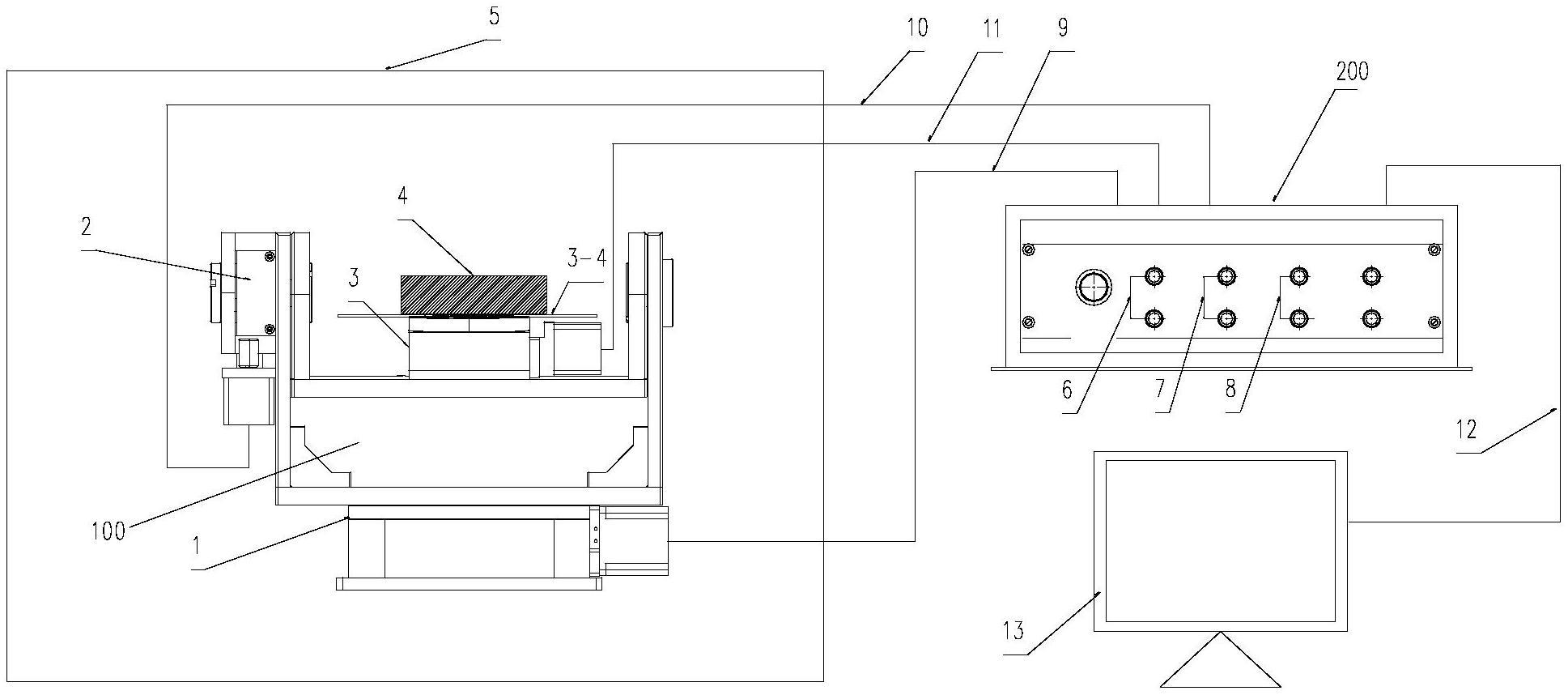
2、为达到上述目的,本实用新型的技术方案:全方位自由度试验旋转平台,包括旋转平台和用于控制所述旋转平台的转台控制器;其中,所述旋转平台包括:第一旋转平台总成,其包括水平放置的第一旋转平台、转动安装在所述第一旋转平台上的第一刻度盘、固定安装在所述第一刻度盘上且开口朝上的第一旋转龙门架,所述第一旋转平台上设有用于带动所述第一刻度盘在水平面内旋转的第一驱动机构;第二旋转平台总成,其包括转动安装在所述第一旋转龙门架的两个侧板之间的第二旋转龙门架、竖直安装在所述第一旋转龙门架的一侧板外壁上的第二旋转平台、转动安装在所述第二旋转平台上的第二刻度盘,所述第二旋转平台上设有用于带动所述第二刻度盘及第二旋转龙门架在竖直平面内旋转的第二驱动机构;第三旋转平台总成,其包括固定安装在所述第二旋转龙门架的底板上的第三旋转平台、转动安装在所述第三旋转平台上的第三刻度盘、固定安装在所述第三刻度盘上的探测器固定盘,所述第三旋转平台上设有用于带动所述第三刻度盘旋转的第三驱动机构。
3、由上,该平台可对报警探测器进行全方位自由度试验,可一次完成3个平面任意自由度方位的实验,彻底解决了手动摆放,单面旋转所带来的种种弊端。单次注气后即可完成多方位实验,为各个报警探测器厂家及各个检测机构提供了便利,精准,快捷的检测手段,节省了气源,人力,物力。满足并优于国家标准gb15322.1、2、3-2019中的方位实验测试要求,保证了报警探测器在使用过程中的测量精密,报警准确,从而保护生产生活中的人身安全。
4、可选的,所述第三刻度盘和探测器固定盘与所述第二旋转龙门架的底板的平面平行设置,所述第三驱动机构带动所述第三刻度盘和探测器固定盘在水平面内旋转。
5、由上,使第三刻度盘和探测器固定盘水平设置,可减少探测器固定盘的转动空间,使整个旋转平台的整体结构更加紧凑,进而可将整个旋转平台放进密封空间内进行方位实验。另外,在第二驱动机构的带动下使第二旋转龙门架相对于水平面形成一定的角度后,通过第三驱动机构再带动探测器固定盘旋转,第三旋转平台总成跟第一旋转平台总成和第一旋转平台总成配合角度旋转,同样可以达到报警探测器的各空间内的旋转要求。
6、进一步的,所述第一驱动机构包括固定在所述第一旋转平台外的第一步进电机、与所述第一步进电机的输出轴连接并位于所述第一旋转平台内部的第一竖直锥齿轮、与所述第一竖直锥齿轮啮合连接的第一水平锥齿轮,所述第一刻度盘通过第一传动轴与所述第一水平锥齿轮同步转动。
7、由上,通过第一步进电机带动第一竖直锥齿轮转动,再通过第一竖直锥齿轮带动第一水平锥齿轮转动,进而带动第一旋转龙门架在水平面内旋转,第一步进电机具有运动控制精确、响应速度快的优势,第一竖直锥齿轮和第一水平锥齿轮之间的传动平稳、噪音小、可承受的负载更大、运动可靠性高,并使第一旋转平台总成的结构更紧凑,占用空间小。
8、可选的,所述第二驱动机构包括固定在所述第二旋转平台外的第二步进电机、与所述第二步进电机的输出轴连接并位于所述第二旋转平台内部的第二水平锥齿轮、与所述第二水平锥齿轮啮合连接的第二竖直锥齿轮,所述第二刻度盘和第二旋转龙门架通过第二传动轴与所述第二竖直锥齿轮同步转动。
9、由上,通过第二步进电机带动第二水平锥齿轮转动,再通过第二水平锥齿轮带动第二竖直锥齿轮转动,进而带动第二旋转龙门架在竖直平面内旋转,第二步进电机具有运动控制精确、响应速度快的优势,第二水平锥齿轮和第二竖直锥齿轮之间的传动平稳、噪音小、可承受的负载更大、运动可靠性高,并使第二旋转平台总成的结构更紧凑,占用空间小。
10、可选的,所述第三驱动机构包括固定在所述第三旋转平台外的第三步进电机、与所述第三步进电机的输出轴连接并位于所述第三旋转平台内部的第三竖直锥齿轮、与所述第三竖直锥齿轮啮合连接的第三水平锥齿轮,所述第三刻度盘通过第三传动轴与所述第三水平锥齿轮同步转动。
11、由上,通过第三步进电机带动第三竖直锥齿轮转动,再通过第三竖直锥齿轮带动第三水平锥齿轮转动,进而带动探测器固定盘在水平面内旋转,第三步进电机具有运动控制精确、响应速度快的优势,第二水平锥齿轮和第二竖直锥齿轮之间的传动平稳、噪音小、可承受的负载更大、运动可靠性高。通过第三竖直锥齿轮和第三水平锥齿轮之间的传动能够将竖直方向的运动转化为水平方向的运动,并将第三步进电机和第三刻度盘及探测器固定盘一样也设置成水平,有利于节省空间,使第三旋转平台总成的结构更紧凑,占用空间小。
12、进一步的,所述第一刻度盘、第二刻度盘和第三刻度盘的圆周侧面上具有刻度线,所述第一旋转平台、第二旋转平台和第三旋转平台上固定有用于观察与其对应的刻度盘的旋转角度的指示针。
13、由上,通过各旋转平台上的指示针可方便快捷的读出安装在各自旋转平台上的刻度盘的旋转角度,方便对报警探测器的旋转方位进行控制。
14、可选的,所述转台控制器包括通过第一控制线与所述第一驱动机构电性连接的第一控制按键、通过第二控制线与所述第二驱动机构电性连接的第二控制按键、通过第三控制线与所述第三驱动机构电性连接的第三控制按键。
15、由上,通过各控制按键可以手动控制对报警探测器的进行旋转,无需每次调整报警探测器的角度时打开密封空间,操作方便,节省大量的气体和人力。
技术特征:
1.一种全方位自由度试验旋转平台,其特征在于,包括旋转平台和用于控制所述旋转平台的转台控制器;
2.根据权利要求1所述的全方位自由度试验旋转平台,其特征在于,所述第三刻度盘和探测器固定盘与所述第二旋转龙门架的底板的平面平行设置,所述第三驱动机构带动所述第三刻度盘和探测器固定盘在水平面内旋转。
3.根据权利要求1所述的全方位自由度试验旋转平台,其特征在于,所述第一驱动机构包括固定在所述第一旋转平台外的第一步进电机、与所述第一步进电机的输出轴连接并位于所述第一旋转平台内部的第一竖直锥齿轮、与所述第一竖直锥齿轮啮合连接的第一水平锥齿轮,所述第一刻度盘通过第一传动轴与所述第一水平锥齿轮同步转动。
4.根据权利要求1所述的全方位自由度试验旋转平台,其特征在于,所述第二驱动机构包括固定在所述第二旋转平台外的第二步进电机、与所述第二步进电机的输出轴连接并位于所述第二旋转平台内部的第二水平锥齿轮、与所述第二水平锥齿轮啮合连接的第二竖直锥齿轮,所述第二刻度盘和第二旋转龙门架通过第二传动轴与所述第二竖直锥齿轮同步转动。
5.根据权利要求2所述的全方位自由度试验旋转平台,其特征在于,所述第三驱动机构包括固定在所述第三旋转平台外的第三步进电机、与所述第三步进电机的输出轴连接并位于所述第三旋转平台内部的第三竖直锥齿轮、与所述第三竖直锥齿轮啮合连接的第三水平锥齿轮,所述第三刻度盘通过第三传动轴与所述第三水平锥齿轮同步转动。
6.根据权利要求1至5任一项所述的全方位自由度试验旋转平台,其特征在于,所述第一刻度盘、第二刻度盘和第三刻度盘的圆周侧面上具有刻度线,所述第一旋转平台、第二旋转平台和第三旋转平台上固定有用于观察与其对应的刻度盘的旋转角度的指示针。
7.根据权利要求1所述的全方位自由度试验旋转平台,其特征在于,所述转台控制器包括通过第一控制线与所述第一驱动机构电性连接的第一控制按键、通过第二控制线与所述第二驱动机构电性连接的第二控制按键、通过第三控制线与所述第三驱动机构电性连接的第三控制按键。
技术总结
本技术公开了一种全方位自由度试验旋转平台,包括旋转平台和用于控制旋转平台的转台控制器;其中,旋转平台包括第一旋转平台总成、第二旋转平台总成和第三旋转平台总成。本技术的全方位自由度试验旋转平台可对报警探测器进行全方位自由度试验,可一次完成3个平面任意自由度方位的实验,彻底解决了手动摆放,单面旋转所带来的种种弊端。单次注气后即可完成多方位实验,为各个报警探测器厂家及各个检测机构提供了便利,精准,快捷的检测手段,节省了气源,人力,物力,满足报警探测器的方位实验测试要求,保证了报警探测器在使用过程中的测量精密,报警准确,从而保护生产生活中的人身安全。
技术研发人员:张利军,庞明俊,杨军龙
受保护的技术使用者:北京均方理化科技研究所
技术研发日:20230315
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!