一种交通事故时空影响范围识别、关联因素确定方法
本发明属于交通事故管理,涉及一种交通事故时空影响范围识别、关联因素确定方法。
背景技术:
1、道路交通是全地域、全天候、全链条国家战略投送能力的关键支撑,是保障社会经济平稳发展的核心基础设施。随着中国机动车保有量的爆炸性增长,道路问题日益严重,交通拥堵是所有交通问题中最广泛且最有影响力的问题,其不仅严重影响了公众的出行体验,还会造成重大的经济损失。高速公路具有提高交通效率、促进经济发展等重要的社会价值,而因为其具有车辆行驶速度快、车辆类型多样、交通环境孤立的特点,交通事故是造成其节点瘫痪和拥堵蔓延的重要诱因,极易导致大规模的交通堵塞。因此,挖掘高速公路交通事故影响机理,探索其时空特征和内在规律,对于提高高速公路行车效率及有针对性地采取交通事故后的动态交通控制措施具有重要的现实意义。
2、针对交通事故等离散型事件,当前大部分研究主要利用排队理论、冲击波模型和仿真计算来确定交通事件的时空迟滞影响范围,由特定的虚构路网和参数的模拟仿真方法出发,以确定交通事故影响的时空范围。理想假设下的早期模型空间迁移能力有限,不适用于现实交通状况。随着数据采集手段的不断丰富,部分学者利用现实交通数据采用许多变量方法开展交通事故时空影响的研究。现有针对交通事故时空迟滞影响的致因分析主要采用计量经济学模型和因果推理模型等方法,然而,大部分研究没有考虑交通事故间存在的空间依赖性,易造成潜在因素的遗漏甚至得到不准确或误导性的结论。
3、综上所述,现有方法多基于固定时空粒度、面向简单交通场景进行交通事故时空迟滞影响分析,难以适应高动态、复杂场景的现实交通环境。
技术实现思路
1、本发明实施例的目的在于提供一种交通事故时空影响范围识别方法,以解决现有方法多基于固定时空粒度、面向简单交通场景进行交通事故时空迟滞影响分析,难以适应高动态、复杂场景的现实交通环境的问题。
2、本发明实施例的另一目的在于提供一种交通事故时空影响范围的关联因素确定方法。
3、本发明实施例所采用的技术方案是:一种交通事故时空影响范围识别方法,包括以下步骤:
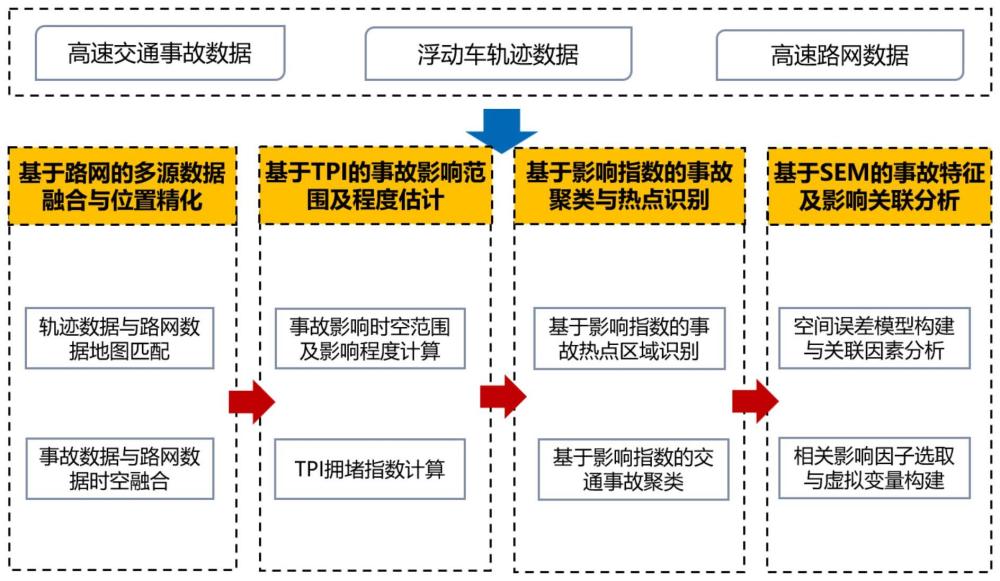
4、步骤s1、进行浮动车轨迹数据、高速公路交通事故数据、高速公路路网数据等异构数据间的时空关联和信息融合;
5、步骤s2、基于步骤s1得到的时空关联和信息融合数据,引入交通运行指数评估各路段的交通状态,量化交通事故时空影响的各项指标,包括交通事故影响的持续时间、交通事故影响的路段长度及交通事故影响的严重程度。
6、进一步的,所述步骤s1的具体过程如下:
7、步骤s11、基于交通事故数据中的交通事故地点信息,确定与各交通事故点地点信息中的道路名称和行驶方向相同的对应高速路地图要素,再根据对应高速地图要素的起点里程信息,采用线性插值计算出各交通事故点的空间坐标,实现交通事故数据与路网数据的时空关联;
8、步骤s12、筛选出浮动车轨迹有效行程,为交通事故分配浮动车轨迹点,建立轨迹数据和交通事故数据的空间联系;
9、步骤s13、建立高速公路路网有向图g(v,e),v为节点即各路段的端点或交点的集合,e为路段即有向边e的集合,车辆沿着路径在路网上行驶,实际经过的轨迹点为z′={z′0,...,z′n},z′i∈z′,i∈[0,n],z'i对应的轨迹定位点为zi,轨迹定位点zi的经纬度坐标为(xi,yi);
10、步骤s14、计算各轨迹定位点zi到路段的垂直距离;
11、步骤s15、利用步骤s14计算的垂直距离和最短路径原理,构建各轨迹定位点zi的候选路段集s={e1,e2,e3,…em},m表示候选路段总数;
12、步骤s16、基于步骤s12~s15的计算结果,构建地图匹配的目标函数,得到车辆行程轨迹定位点zi经过的最短路径的路段集合,计算各轨迹定位点zi与该最短路径的路段集合中各路段的距离,将与各轨迹定位点zi距离最近的路段作为该轨迹定位点zi的匹配路段;
13、步骤s17、采用垂直相交求垂足的方法计算各轨迹定位点zi到其匹配路段的垂足,垂足点即为各轨迹定位点zi的匹配的轨迹点z′i。
14、进一步的,所述步骤s14计算各轨迹定位点到路段的垂直距离的公式如下:
15、
16、其中,表示轨迹定位点zi到路段e的垂直距离,zi′是轨迹定位点zi在路段e上的垂直投影,d(zi,z′i)表示点zi和z′i之间的欧式距离;v1、v2表示路段e的两个端点,d(zi,v1)表示轨迹定位点zi到路段e的端点v1的欧式距离,d(zi,v2)表示轨迹定位点zi到路段e的端点v2的欧式距离;
17、所述步骤s15构建各轨迹点的候选路段集s的构建规则如下:
18、
19、其中,δ为轨迹点定位误差的最大值,即要求轨迹点到路段的距离小于定位误差的最大值δ,e1表示满足式(2)条件的边e的集合,路网g中所有边的集合e中除e1外的所有边e的集合设为e2。
20、进一步的,所述步骤s16构建的地图匹配的目标函数如式(3)所示:
21、
22、其中,e1表示轨迹点到路段的距离小于定位误差的最大值的路段即边e的集合,路网g中所有边的集合e中除e1外的所有边e的集合设为e2;r为缩短率,用于缩短e1中所有边e的长度,0<r<1,经过多次实验验证,本发明实施例中r值取0.3更佳;le为边e的长度,xe为决策变量,若边e∈s,则xe=1,表示边e存在于最短路径中,否则为0。
23、进一步的,所述步骤s2具体包括以下步骤:
24、步骤s21、基于自由流状态下车辆经过的旅行时间和车辆实际经过的旅行时间,构造顾及路段间的异质性的识别阈值,识别道路受影响的交通运行状态;
25、步骤s22、基于顾及路段间的异质性的识别阈值,筛选出对路段交通造成影响的交通事故;
26、步骤s23、量化交通事故影响的持续时间、交通事故影响的严重程度和交通事故影响的路段长度。
27、进一步的,所述步骤s21采用交通运行指数tpi制定交通事故影响的识别规则,基于tpi的路况等级划分见下表:
28、 tpi 对应路况 旅行时间 通行速度 影响严重程度 0-2 畅通 <![cdata[t<sub>f</sub>]]> <![cdata[≥0.83v<sub>f</sub>]]> 0 2-4 基本畅通 <![cdata[1.2t<sub>f</sub>-1.5t<sub>f</sub>]]> <![cdata[0.66v<sub>f</sub>-0.83v<sub>f</sub>]]> 1 4-6 轻度拥堵 <![cdata[1.5t<sub>f</sub>-1.8t<sub>f</sub>]]> <![cdata[0.56v<sub>f</sub>-0.66v<sub>f</sub>]]> 2 6-8 中度拥堵 <![cdata[1.8t<sub>f</sub>-2.1t<sub>f</sub>]]> <![cdata[0.47v<sub>f</sub>-0.56v<sub>f</sub>]]> 3 8-10 严重拥堵 <![cdata[>2.1t<sub>f</sub>]]> <![cdata[<0.47v<sub>f</sub>]]> 4
29、其中,tf表示交通状态正常即无拥堵情况下车辆通过的时间;
30、基于轨迹数据对各路段全天的速度分布进行升序排序,然后将位于路段速度序列85%位置处的速度值作为其自由流速度vf;
31、将一天24小时划分为多个时间切片,根据路段一天24小时的轨迹数据计算各时间切片的路段速度值即为实际行驶速度va,若路段在某时间切片内没有车辆经过则会导致速度值缺失,基于该路段速度值缺失的时间切片前后时间切片的非零速度值并利用线性插值法对缺失值进行填充;
32、所述交通运行指数tpi由实际行驶速度va和自由流速度vf的比值确定。
33、进一步的,所述步骤s22的具体过程为:
34、步骤s221、计算交通事故所在路段从交通事故发生时间ta所处时间切片tc开始的半小时内的时间切片的路段速度:
35、假设车辆q在时间切片tc所处时段在路段s上行驶,其行程轨迹由n个轨迹点{z′0,....,z′n}按时间先后顺序连接构成,该路段s在该时间切片tc内共经过q辆车,则该路段s在时间切片tc的平均速度计算公式为:
36、
37、其中,表示路段s在时间切片tc的平均速度,n为车辆q在时间切片tc所处时段在该路段s上的轨迹点总数,vn为车辆q在第n个轨迹点z′n的速度值;
38、步骤s222、根据tpi和交通事故发生路段及其上游路段的实际通行速度之间的关系,判别交通事故是否影响交通运行状态,筛选出对交通运行状态有影响的交通事故,判别公式如下:
39、
40、式中,为根据公式(5)计算的交通事故发生路段s及相邻的上游路段s-1在交通事故发生半小时内各时间切片的速度,vf,s、vf,s-1为交通事故发生路段s及相邻的上游路段s-1的自由流速度,tc为包含交通事故时间的时间切片;中间变量ac为1说明该交通事故影响交通运行状态;
41、所述步骤s23的具体过程为:
42、步骤s231、从交通事故所在路段向上,依次判断相邻上游路段交通运行状态是否被交通事故影响;
43、步骤s232、判断无被该交通事故影响交通状态的上游路段s-r出现时的时间切片序号tm:
44、(1)以交通事故所在路段s作为当前路段,依次计算每个当前路段各时间切片的速度,按公式(6)判断每个当前路段各时间切片交通运行状态是否被当前交通事故影响,直至得到某时间切片中当前交通事故对当前路段的交通状态的影响消失;
45、(2)将与当前路段相邻的上游路段s-r更新为当前路段,r初始值为1,判断更新后的当前路段在下一时间切片的路段速度并判断当前交通事故对该更新后的当前路段的交通状态影响,直至在某时间切片中当前交通事故对更新后的当前路段的交通状态的影响消失;
46、(3)r值加1,重复步骤(2),直至在时间切片序号tm中无被当前交通事故影响交通状态的上游路段s-r出现,返回时间切片序号tm和上游路段序号s-r;
47、步骤s232、按下列公式计算交通事故影响的持续时间:
48、h1=(tm-tc)*tcell; (7)
49、h2=tcell-ta%tcell; (8)
50、tinfluence=h1-h2; (9)
51、其中,tcell为时间切片时段间隔,h1是根据交通事故发生时间所处时间切片tc和交通事故影响结束时间切片tm计算的影响时间;h2为交通事故发生时间所处时间切片tc中交通事故发生之前的分钟数,ta为交通事故发生时间的分钟数,ta%tcell表示交通事故发生时间的分钟数除以时间切片时间间隔的余数,h1-h2即可得到交通事故影响的持续时间tinfluence;
52、根据步骤s211的表中描述的tpi与交通事故影响严重程度的对应关系,即可获得受交通事故影响路段中各时间切片的交通事故影响严重程度,并认为影响严重程度的最大值为该交通事故的影响程度adaccident:
53、
54、其中,为路段s在时间切片tc的受影响程度,ads,t为路段s在时间切片t的受影响程度,ads,t+1为路段s在时间切片t+1的受影响程度,为最后受影响的上游路段s-r在最后受影响的时间切片tm的受影响程度;
55、量化交通事故影响的路段长度,计算公式如下:
56、
57、lsinfluence=l-d; (12)
58、其中,lss为交通事故所处路段s的长度,lss-i为路段s的上游路段s-i的长度,r为路段s的上游路段受交通事故影响的总数,l为受交通事故影响的所有路段的长度之和,lsinfluence为实际的交通事故影响的路段长度。
59、进一步的,量化的交通事故影响的各项指标,用于采用k-means聚类算法基于交通事故影响的时空跨度对交通事故进行分类,并用于采用核密度分析挖掘交通事故影响的空间分布特征。
60、进一步的,所述采用k-means聚类算法基于交通事故影响的时空跨度对交通事故进行分类的具体过程如下:
61、结合dbi指数和手肘法确定最佳聚类数k值,基于最佳聚类数,利用步交通事故影响持续时间、交通事故影响路段长度及交通事故影响的严重程度这三个影响特征进行k-means聚类,对交通事故分类,将影响特征的相似度高的交通事故分在同一类;
62、dbi值,具体计算公式如下:
63、
64、其中,maxi,i≠j表示第i个簇的相似度为簇i与其他簇j的相似度的最大值,x表示簇内样本值,即同属一个簇的不同交通事故的交通事故属性值,交通事故属性值为交通事故影响时长、交通事故影响路段长度或交通事故影响程度,xi为第i个簇的交通事故属性聚类中心值,nε为聚类结果中簇的个数,d(x,xi)表示第i个簇内的样本x到该簇中心xi的距离,nj表示第j个簇的样本数,d(x,xj)表示第j个簇内的样本x到该簇中心xj的距离,ni表示第i个簇的样本数,d(xi,xj)为簇中心xi到簇中心xj的距离;
65、手肘法中随聚类数k变化的误差平方和sse计算公式如下:
66、
67、其中,ci是第i个簇,p是ci中的样本点,xi是簇ci的中心值,sse是所有样本的聚类误差;
68、进行交通事故影响持续时间和交通事故影响路段长度核密度分析,挖掘交通事故影响的空间分布,识别交通事故影响的热点区域。
69、本发明实施例所采用的另一技术方案是:一种交通事故时空影响范围的关联因素确定方法,包括以下步骤:
70、采用如上所述的一种交通事故时空影响范围识别方法识别交通事故影响持续时间和交通事故影响路段长度;
71、对交通事故影响持续时间和交通事故影响路段长度进行全局moran’s i检验,计算公式如下,判断交通事故影响持续时间和交通事故影响路段长度之间是否存在空间相关性:
72、
73、式中,m为步骤s2筛选出的交通事故个数,wa,b为不同交通事故a和b的属性值之间的空间权重,为m个交通事故的属性平均值,xa为交通事故a的属性值,xb为交通事故b的属性值;
74、选取与交通事故时空迟滞有关的影响因子,即交通事故特征、环境特征、交通特征、道路特征,构建顾及空间异质性的属性表,如下表所示:
75、
76、
77、使用方差膨胀因子对顾及空间异质性的属性表中的变量进行多重共线性诊断,当0<vif<10时说明各变量间不存在多重共线性,如果诊断得到各变量间存在多重共线性,就对存在多重共线性的变量进行筛选,删去部分存在共线性的变量,若某变量共有u类,则构建u-1个虚拟变量;所有u-1个虚拟变量取值都为0时,表示该变量是第u类,即将该第u类作为参照,在模型回归之后进行回归系数解释时,该变量其他类型的虚拟变量的回归系数,均表示该虚拟变量与参照相比之后对解释变量的影响;
78、方差膨胀因子的计算公式如下:
79、
80、其中,为顾及空间异质性的属性表中引入虚拟变量后的所有变量中单个变量对其余变量作回归分析的负相关系数;
81、如果交通事故影响持续时间和交通事故影响路段长度之间存在空间相关性,通过拉格朗日乘子检验选取并构建空间回归模型;
82、基于消除多重共线性的属性表,利用构建的空间回归模型对交通事故时空迟滞影响关联因素进行分析,得到与交通事故时空影响范围相关的影响因素。
83、本发明实施例的有益效果是:
84、1、提供了一种交通事故时空影响范围识别方法,采用融合路网数据、交通事故数据和浮动车轨迹数据的现实数据进行交通事故影响的识别分析,融合数据精度高、空间粒度细、语义属性丰富,且因为浮动车轨迹数据覆盖面广,可以对时空大范围内的交通运行状态进行分析,能够适应高动态、复杂场景的现实交通环境,解决了现有方法多基于固定时空粒度、面向简单交通场景进行交通事故时空迟滞影响分析,难以适应高动态、复杂场景的现实交通环境的问题;
85、2、基于速度变化情况量化了高速公路交通事故的时空影响范围和影响程度,并基于k-means聚类分析和核密度分析方法对交通事故的时空影响特征(事故影响时长、影响长度、影响程度、事故时空影响的空间分布)及交通事故影响的热点区域进行识别分析;并采用考虑变量间空间依赖性的空间误差模型对交通事故影响关联因素进行分析,突破了以往研究基于固定时空粒度、面向简单交通场景的限制,基于现实数据和顾及空间依赖关系的回归模型,能有效识别交通事故的时空迟滞影响及内在机理特征。
- 还没有人留言评论。精彩留言会获得点赞!