针对车辆进行实时停车引导的方法、装置、处理器及其计算机可读存储介质与流程
本发明涉及激光雷达,尤其涉及车辆停车引导,具体是指一种针对车辆进行实时停车引导的方法、装置、处理器及其计算机可读存储介质。
背景技术:
1、目前,国内大部分车辆停车引导为地面标识符引导,司机通过观察相关的标识符进行停车,由于存在人为观察产生的误差,所以无法实现精准的停车引导。另外,主流的智能停车引导方案有:利用超声波技术进行停车引导、利用激光测距模组技术进行停车引导、利用视频技术进行停车引导、利用3d激光雷达技术进行停车引导和利用gps定位技术进行停车引导等。
2、超声波和激光测距技术引导停车均为单点测量方式,首先其无法自适应各种类型的车辆,另外单点测量方式无法通过测量得到车辆的偏转角度。视频引导技术通过视频采集设备获取高清图像,然后利用机器视觉技术或者人工智能技术识别出车辆主体,从而对车辆位置实时监控,但由于其安装方式和图像处理原理决定了其无法提供精准的车辆位置。3d激光雷达技虽然可以获得丰富的点云图像,但是由于其旋转采集的物理机构方式,决定了其采集频率较低,无法满足车辆引导时的高速识别。利用gps定位技术进行停车引导,首先需要每个车辆提前预装gps硬件设备,增加了总成本;其次,gps定位技术无法获得车辆的实时偏转角。
3、因此,需要一种能够自适应各种型号的车辆,使其能够根据车辆特征实时调整引导基准点,同时测量车辆位置和车辆角度,以解决高精度停车引导的问题。
技术实现思路
1、本发明的目的是克服了上述现有技术的缺点,提供了一种具有处理速度快、数据实时性高的针对车辆进行实时停车引导的方法、装置、处理器及其计算机可读存储介质。
2、为了实现上述目的,本发明的该针对车辆进行实时停车引导的方法、装置、处理器及其计算机可读存储介质如下:
3、该针对车辆进行实时停车引导的方法,其主要特点是,所述的方法包括以下步骤:
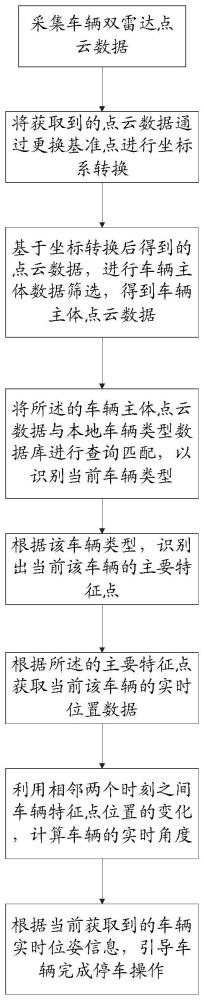
4、(1)采集车辆双雷达点云数据;
5、(2)将获取到的点云数据通过更换基准点进行坐标系转换;
6、(3)基于坐标转换后得到的点云数据,进行车辆主体数据筛选,得到车辆主体点云数据;
7、(4)将所述的车辆主体点云数据与本地车辆类型数据库进行查询匹配,以识别当前车辆类型;
8、(5)根据该车辆类型,识别出当前该车辆的主要特征点;
9、(6)根据所述的主要特征点获取当前该车辆的实时位置数据;
10、(7)利用相邻两个时刻之间车辆特征点位置的变化,计算车辆的实时角度;
11、(8)根据当前获取到的车辆实时位姿信息,引导车辆完成停车操作。
12、较佳地,步骤(1)所述的双雷达点云数据包括由纵向雷达和横向雷达构成的二维激光雷达数据。
13、较佳地,所述的纵向雷达和横向雷达均安装于车辆行驶区域的正上方,其中,
14、所述的纵向雷达设置为:雷达主体朝向地面,且扫描平面位于车辆长度方向上的中轴线;
15、所述的横向雷达设置为:雷达主体朝向地面,且扫描平面的空间坐标垂直于所述的纵向雷达的扫描平面。
16、较佳地,所述的步骤(2)具体为:
17、将车辆原本以雷达为基准点获取到的点云数据转换为以地面某点q为基准点,并按照以下方式进行坐标系转换:
18、
19、其中,为雷达点云在原坐标系中的坐标,为经过坐标转换后得到的坐标,为点云的旋转变换矩阵,为点云的平移矩阵;
20、将所述的纵向雷达经过上述坐标变化后得到的点云标记为第一点云pa,将所述的横向雷达经过上述坐标变化后得到的点云标记为第二点云pb。
21、较佳地,所述的步骤(3)具体包括以下步骤:
22、(3.1)点云合并:将所述的第一点云pa和第二点云pb进行合并,得到第三点云pm,处理方式如下:
23、pm=pa∪pb
24、(3.2)直通滤波:将车辆的停车区域进行限制划分,筛选出车辆主体点云所在的区域,处理方式如下:
25、pt=pm(x,y,z)
26、其中,xmin<x<xmax,ymin<y<ymax,zmin<z<zmax,pt为经过直通滤波处理后得到的点云,xmin和xmax为x方向上的区域界限,ymin和ymax为y方向上的区域界限,zmin和zmax为z方向上的区域界限;
27、(3.3)统计滤波:对经过直通滤波处理后得到的点云pt中每一个点的领域进行统计分析,过滤掉不满足要求的离群点:
28、(3.3.1)遍历点云pt中的每一个坐标点;
29、(3.3.2)计算点云pt中每个点到其临近点的距离dij,其中i=[1,…,m]表示共有m个点,j=[1,…,k]每个点有k个临近点;
30、(3.3.3)根据高斯分布d~n(μ,σ)模型化距离参数,按照以下方式计算点云pt中所有的点与其临近点的距离均值μ和距离标准差σ:
31、
32、
33、其中,m表示点云中所有点的总个数,k表示某一个点的临近点总个数;
34、(3.3.4)遍历点云pt中的所有点,并移除离群点,得到车辆主体点云数据pn,其中,
35、所述的离群点按照以下方式进行判断:
36、或者
37、其中,为每一个点与其临近点的距离均值。
38、较佳地,所述的步骤(4)具体为:
39、将所述的车辆主体点云数据pn与预先存入本地车辆类型数据库中的车辆数据,按照以下方式进行查询匹配:
40、
41、其中,f(s)为车辆主体点云与本地车辆类型点云特征点之间的距离,s为平移参数,r为最优变换参数,为第i个主体车辆点云,1≤i≤n,为本地数据库中第i个已预先存入的某一车辆类型的数据。
42、较佳地,所述的步骤(5)具体包括以下步骤:
43、(5.1)根据上述步骤确定的车辆类型,进一步确定当前该车辆的主要特征点区域,并以此获取主要特征点区域内的点云数据po;
44、(5.2)按照以下方式计算主要特征点区域的点云质心,以此获取车辆特征点的坐标:
45、
46、其中,qc为特征点的点云质心,(xi,yi,zi),i=1,2,3,…,n为各个质点的坐标。
47、较佳地,所述的步骤(6)具体为:
48、根据上述步骤获取到的当前该车辆的点云质心,确定该类型车辆的横向引导基础点坐标数据和纵向引导基础点坐标数据,并将其综合得到当前该车辆的实时位置坐标h(qcx,qcy)。
49、较佳地,所述的步骤(7)具体包括以下步骤:
50、(7.1)计算t1时刻的车辆位置h(t1):
51、h(t1)=(qcx(t1),qcy(t1))
52、(7.2)计算t2时刻的车辆位置h(t2):
53、h(t2)=(qcx(t2),qcy(t2))
54、(7.3)计算t1至t2时刻的偏转角:
55、
56、其中,radian为车辆的偏转角,arctan为反正切函数,h(t1)x为t1时刻的车辆位置的x坐标值,h(t1)y为t1时刻的车辆位置的y坐标值,h(t2)x为t2时刻的车辆位置的x坐标值,h(t2)y为t2时刻的车辆位置的y坐标值;
57、(7.4)计算任意时刻t的车辆偏转角:
58、
59、其中,t0为车辆刚进入车辆引导区域的时刻,当t取当前时刻值时,通过上述计算可得当前的车辆偏转角度rad。
60、较佳地,所述的步骤(8)具体为:
61、根据当前获取到的实时位置坐标h(qcx,qcy)和车辆偏转角度rad,计算当前位姿与停车目标点位姿之间的差值,并将该差值数据发送给对应的目标车辆,所述的目标车辆根据该差值数据实时调整当前车辆的行驶状态,从而将车辆精准的停靠在目标区域内,以此完成停车引导。
62、该针对车辆进行实时停车引导的装置,其主要特点是,所述的装置包括:
63、处理器,被配置成执行计算机可执行指令;
64、存储器,存储一个或多个计算机可执行指令,所述的计算机可执行指令被所述的处理器执行时,实现上述所述的针对车辆进行实时停车引导的方法的步骤。
65、该针对车辆进行实时停车引导的处理器,其主要特点是,所述的处理器被配置成执行计算机可执行指令,所述的计算机可执行指令被所述的处理器执行时,实现上述所述的针对车辆进行实时停车引导的方法的步骤。
66、该计算机可读存储介质,其主要特点是,其上存储有计算机程序,所述的计算机程序可被处理器执行以实现上述所述的针对车辆进行实时停车引导的方法的步骤。
67、采用了本发明的该针对车辆进行实时停车引导的方法、装置、处理器及其计算机可读存储介质,能够根据车辆特征实时调整引导基准点,同时测量车辆位置和车辆角度,具有处理速度快、数据实时性高且测量精准的优点,同时,本技术方案由于采用二维雷达,加上其数据量少的固有属性,相较于使用三维雷达的系统来说,处理速度更快,从而有效的解决了高精度停车引导的问题,具有一定的实用性。
- 还没有人留言评论。精彩留言会获得点赞!