一种数字域正交双极化天线极化方向控制方法
1.本发明涉及微波天线与数字信号处理相结合的技术,尤其涉及一种数字域正交双极化天线极化方向控制方法,通过将发射信号在数字域进行变换处理,利用正交双极化天线来调整发射信号的极化状态,从而使得信号经过信道干扰后仍然最大限度的与接收天线正交,可以在发射端数字域解决全双工等系统中的自干扰消除问题。
背景技术:
2.同时同频全双工通信可以扩大两倍频谱效率,节约频谱资源,提高用户传输速率。然而这一过程中,单用户的接收天线在接收对方发射的信号同时,也会接收到来自自身发射天线的同频率信号,产生自干扰。一类现有的全双工自干扰消除方法利用天线极化方向的正交性,分别使用左旋圆极化、右旋圆极化天线做为单用户的发射天线和接收天线,来实现全双工自干扰消除。然而,由于传输信道的影响,射频信号的圆极化状态会被干扰而变为椭圆极化,不能保证理想的长宽比和相位差,在接收处产生自干扰残余。现有的利用数字域正交双极化天线解决全双工自干扰场景的技术中,采用固定一种信号极化方式进行传输,针对的是收发机对相位的干扰问题。
3.综上,现有同时同频全双工通信技术尚未能解决射频信号的圆极化状态会被传输信道干扰的问题。
技术实现要素:
4.为了解决射频信号圆极化状态受传输信道干扰的问题,本发明提供一种数字域正交双极化天线极化方向控制方法,针对极化状态会被传输信道干扰的技术问题,通过调整极化方式使得调整后消除传输信道干扰,在解决了信道对射频信号的极化方式造成干扰的问题同时,避免了在模拟域变化幅度和相位而产生的误差。
5.本发明是一种解决信道干扰问题的正交双极化天线极化方式控制方法,使用正交双极化天线作为收发天线,其固有极化状态设左旋圆极化、右旋圆极化。正交双极化天线可以分别调整输入到天线v路和h路的信号,利用这一性质来调整发射信号的极化状态,使得射频信号经过信道干扰后的极化状态仍然与接收天线的极化状态正交,实现自干扰消除。本发明方法是数字域的方法,能够避免模拟域非线性误差。
6.本发明的技术解决方案是:
7.一种数字域正交双极化天线极化方向控制方法,其步骤如下:
8.1)在数字域将要传输的信号s(n)分为v、h两路信号,对v、h两路分别做调幅和移相操作,使得输入到固有极化状态为左旋圆极化的正交双极化天线的v路和h路信号满足极化方式γ:
9.10.其中,γ
*
代表信道对射频信号极化方向的干扰矩阵,k
*
为归一化后的等价幅值影响,δ
*
为等价相位影响。k代表归一化后的对v路信号调幅操作的变化倍数,δ代表归一化后的对h路信号移相操作的变化相位。
11.采用在数字域控制极化方式,避免在模拟域对信号单独做调幅和移相操作时产生的非线性误差;
12.2)v路的幅值变化可以由v路信号数字域乘k实现,k为归一化后的v路信号幅值相对h路信号幅值的变化倍数;表示为:
[0013][0014]
其中,i(n)和q(n)代表调制后的数字域信号实部和虚部,iv(n)和qv(n)代表数字域乘k后信号的实部和虚部;n代表模拟域符号;
[0015]
3)对h路信号在数字域的相位改变进行如下操作:
[0016]
在数字域星座图上,保持幅度不变旋转星座点(i(n),q(n))相对横轴的夹角改变δ代表归一化后的对h路信号移相操作的变化相位。旋转操作可表示为:
[0017][0018]
其中,i(n)和q(n)代表调制后的数字域信号实部和虚部,ih(n)和qh(n)代表数字域旋转变换后信号的实部和虚部;n代表模拟域符号;
[0019]
4)将调幅和移相后的v、h两路数字信号da转换后,经上变频后两路模拟信号分别为:
[0020][0021][0022]
其中,sv(t)为t时刻经上变频后,v路输入到天线v路馈线的模拟域信号;iv(t)、qv(t)分别为t时刻v路信号调制后对应星座图上点的横坐标和纵坐标经da转换后的值;代表t时刻v路模拟域信号sv(t)的相位;sh(t)为t时刻经上变频后,h路输入到天线v路馈线的模拟域信号;ih(t)、qh(t)分别为t时刻h路信号调制后对应星座图上点的横坐标和纵坐标经da转换后的值;代表t时刻h路模拟域信号sh(t)的相位;fc为载波频率;
[0023]
通过上述步骤,在数字域实现了对v路信号的调幅操作和h路信号的移相操作,完成对正交双极化天线的极化方式预处理,即实现数字域正交双极化天线发射信号的极化方向控制。数字域信号极化方式预处理可抵消信道对射频信号极化方向的影响,即发射信号通过数字域预处理、左旋正交双极化天线发射、信道干扰、右旋正交双极化天线接收后实现全双工自干扰消除。
[0024]
本发明提出的方法与现有技术相比的优点在于:
[0025]
(1)提出了在数字域控制天线极化方式的方法,可改变正交双极化天线的极化方式,避免了在模拟域变化幅度和相位而产生的误差。
[0026]
(2)在数字域信号极化方向预处理,可抵消信道对射频信号极化方向的影响。
[0027]
(3)采用正交双极化天线来发射椭圆极化信号,相比固定的圆极化天线,可调整两个维度的分量,灵活度高。相比利用水平、垂直极化隔离的单极化收发天线,也不用特意调整天线极化正交的角度,便于接收天线的配置和摆放。
附图说明
[0028]
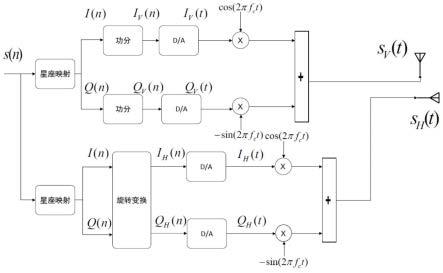
图1为本发明方法的流程示意图。
[0029]
图2为本发明实施例中v方向的信号幅度相对误差仿真结果图。
[0030]
图3为本发明实施例中h方向的信号幅度相对误差仿真结果图。
具体实施方式
[0031]
下面结合附图,通过实施例进一步描述本发明,但不以任何方式限制本发明的范围。
[0032]
一般地,正交双极化天线的极化状态p可表示为:
[0033][0034]
其中,天线的极化状态包括v(垂直)、h(水平)两个方向,cos(ε)和sin(ε)分别为两方向的归一化后的幅值,两者之比即为天线极化方向的椭圆长宽比。θ代表天线垂直于水平方向的相位差,θ=0时为线极化,θ=90
°
时为左旋极化,θ=-90
°
时为右旋极化。当cos(ε)=sin(ε)时,θ=90
°
为左旋圆极化,θ=-90
°
为右旋圆极化。
[0035]
当另一天线的极化状态为:
[0036][0037]
则两根天线的极化方式正交,接收不到另一天线发射的信号,即p
t
p
*
=0。利用极化正交的特性,可以实现全双工自干扰消除。然而,信道对射频信号的极化方向存在影响,会对其幅度和相位造成干扰。设信道对射频信号极化方向的干扰矩阵为γ
*
:
[0038]
[0039]
其中,k
*
为归一化后的等价幅值影响,δ
*
为等价相位影响。这一干扰会影响到自干扰消除效果,产生干扰残余。为了解决这一问题,我们提出在发射天线端改变天线发射出的信号极化方式,以抵消信道对射频信号的干扰。由于天线本身从设计好后就已经固定,其馈线的输入阻抗难以改变,无法改变其极化方式。我们提出可以采用固有极化状态为左旋圆极化的正交双极化天线作为发射天线,预先调整输入到天线两路馈线的信号极化方式,以达到与信道误差恰好抵消的效果,即进入天线v路、h路馈线的信号应满足如下的极化方式γ。
[0040][0041]
其中,k代表归一化后的对v路信号调幅操作的变化倍数,代表归一化后的对h路信号移相操作的变化相位。如图1所示,为了调整输入到天线馈线的两路信号有如上的极化方式,我们提出了一个数字域正交双极化天线极化方式控制方法,避免了在模拟域对信号单独做功率改变和调整相位时产生的非线性误差。在数字域将要传输的信号s(n)分为v、h两路信号,对v、h两路分别做调幅和移相操作,使得处理后要输入到天线的信号满足极化方式γ。
[0042]
(1)其中,v路的幅值变化可以由v路信号数字域乘k实现,k为归一化后的v路信号幅值相对h路信号幅值的变化倍数;表示为:
[0043][0044]
其中,i(n)和q(n)代表调制后的数字域信号实部和虚部,iv(n)和qv(n)代表数字域乘k后信号的实部和虚部;n代表模拟域符号;
[0045]
随后经过da变换,经上变频后v路模拟信号分别为:
[0046][0047]
其中,sv(t)为t时刻经上变频后,v路输入到天线v路馈线的模拟域信号;iv(t)、qv(t)分别为t时刻v路信号调制后对应星座图上点的横坐标和纵坐标经da转换后的值;代表t时刻v路模拟域信号sv(t)的相位;fc为载波频率;由此在数字域改变了v路射频信号的幅值,这一过程引入的量化误差,将在后面说明。
[0048]
(2)对h路信号在数字域的相位改变可以如下操作:
[0049]
在数字域星座图上,保持幅度不变旋转星座点(i(n),q(n))相对横轴的夹角改变δ代表归一化后的对h路信号移相操作的变化相
位。旋转操作可表示为:
[0050][0051]
其中,i(n)和q(n)代表调制后的数字域信号实部和虚部,ih(n)和qh(n)代表数字域旋转变换后信号的实部和虚部;n代表模拟域符号;
[0052]
随后经过da变换,经上变频后h路模拟信号为:
[0053][0054]
sh(t)为t时刻经上变频后,h路输入到天线v路馈线的模拟域信号;ih(t)、qh(t)分别为t时刻h路信号调制后对应星座图上点的横坐标和纵坐标经da转换后的值;t时刻h路模拟域信号sh(t)的相位表示为代表信号s(n)对应星座点相对横轴的夹角经da转换后的值;fc为载波频率;
[0055]
由此,在数字域改变了h路射频信号的相位,这一过程引入的量化误差,将在后面说明。
[0056]
至此,对正交双极化天线的极化方式预处理已经完成,发射信号自预处理、天线发射、信道干扰、天线接收后实现自干扰消除,即(γpγ
*
)
t
p
*
=0。
[0057]
实施例:
[0058]
在matlab仿真软件中对本专利方法进行了仿真分析。由于操作流程中涉及数字模拟转换,在包含dac、功分、旋转变换、载波调制的过程中都引入了量化误差。
[0059]
在matlab仿真分析时,我们研究qpsk调制的四个符号(1,1)、(1,-1)(-1,1)(-1,-1)的误差分析。dac的量化精度选取12位,即最小精度仿真所选取的功分放大倍数k选取范围位1/2~2,以步进为lsb选取参数,得到参数个数m=6142个。相位改变δ选取范围为0~2π,以随机的方式选取m个取值。两个参数搭配组合成为m2组幅值、相位参数,用于误差仿真计算。在dac、功分、旋转变换、载波调制的每步计算时,都要计算因精度有限所带来的误差,计算过程采用四舍五入,即小于lsb时取0,大于lsb时进位1。
[0060]
经过仿真计算,四个符号的相对误差分布基本一致,平均统计后v、h路幅度的相对误差如图2、图3所示。可以看到,v、h路幅度绝大多数的相对误差集中在很小的方位内。据统计,超过98%的仿真结果中,v、h路幅度的相对误差在-2.5
×
10-3
~2.5
×
10-3
内,这种精度下残余自干扰的误差可以达到10-3
量级。
[0061]
需要注意的是,公布实施例的目的在于帮助进一步理解本发明,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神和范围内,各种替换和修改都是可能的。因此,本发明不应局限于实施例所公开的内容,本发明要求保护的范围以权利要求书界定的范围为准。本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1