多模式天线系统的制作方法
多模式天线系统
1.优先权声明
2.本技术要求申请日为2019年3月21日、题为“多模式天线系统”的美国临时申请no.62/821,740的优先权,其通过引用结合于此。
技术领域
3.本公开总体上涉及多模式天线系统。
背景技术:
4.多输入多输出(mimo)系统正越来越多地用在无线通信中,例如用在诸如wifi无线接入点的接入点中。mimo系统包括两个或更多个天线,该两个或更多个天线允许信号通过两条或多条路径发送或接收。在一些情况下,mimo系统中的天线优选地具有高的且优选地相等的效率以及良好的隔离和低相关性。然而,由于采用mimo系统的多路径环境不断变化,通信链路的性能会受到影响。
技术实现要素:
5.本公开的实施例的方面和优点将在以下描述中部分阐述,或者可以从描述中获知,或者可以通过实施例的实践获知。
6.在一个方面,提供了一种多模式天线系统。多模式天线系统可以包括具有导电接地平面的电路板。多模式天线系统可以包括布置在接地平面上的第一模态天线。第一模态天线可以以多种模式之一配置。此外,多种模式中的每一种模式可以具有不同的辐射图(radiation pattern)。第一模态天线可以包括驱动元件、至少一个寄生元件和有源元件,该有源元件被配置为调整至少一个寄生元件的电抗,以改变与驱动元件相关联的辐射图。多模式天线系统还可以包括布置在接地平面上的第二模态天线。第二模态天线可以以多种模式之一配置。此外,多种模式中的每一种模式可以具有不同的辐射图。第二模态天线可以包括驱动元件、至少一个寄生元件和有源元件,该有源元件被配置为调整第二模态天线的至少一个寄生元件的电抗,以改变与第二模态天线的驱动元件相关联的辐射图。此外,第二模态天线的至少一个寄生元件被定位成使得控制第二模态天线的有源元件以调整第二模态天线的至少一个寄生元件的电抗影响与第一模态天线相关联的辐射图。
7.在另一方面,提供了一种多模式天线系统。多模式天线系统包括具有接地平面的电路板。多模式天线系统包括布置在接地平面上的第一模态天线。第一模态天线可以以多种模式之一配置。多种模式中的每一种模式具有不同的辐射图。第一模态天线包括驱动元件和至少一个寄生元件。第一驱动元件被定位在接地平面的第一边缘附近。第一模态天线还包括有源元件,该有源元件被配置为调整至少一个寄生元件的电抗,以改变与驱动元件相关联的辐射图。
8.多模式天线系统包括布置在接地平面上的第二模态天线。第二模态天线可以以多种模式之一配置。多种模式中的每一种模式具有不同的辐射图。第二模态天线包括驱动元
件和至少一个寄生元件。第二模态天线的驱动元件被定位在接地平面的第二边缘附近。第二模态天线包括有源元件,该有源元件被配置为调整第二模态天线的至少一个寄生天线元件的电抗,以改变与第二模态天线的驱动元件相关联的辐射图。
9.多模式天线系统包括布置在接地平面上的第三模态天线。第三模态天线可以以多种模式之一配置。多种模式中的每一种模式具有不同的辐射图。第三模态天线包括驱动元件和至少一个寄生元件。第三模态天线的驱动元件被定位在接地平面的第三边缘附近。第三模态天线包括有源元件,该有源元件被配置为调整第三模态天线的至少一个寄生天线元件的电抗,以改变与第三模态天线的驱动元件相关联的辐射图。
10.多模式天线系统包括布置在接地平面上的第四模态天线。第四模态天线可以以多种模式之一配置。多种模式中的每一种模式具有不同的辐射图。第四模态天线包括驱动元件和至少一个寄生元件。第四模态天线的驱动元件被定位在接地平面的第四边缘附近。第四模态天线还包括有源元件,该有源元件被配置为调整第四模态天线的至少一个寄生天线元件的电抗,以改变与第四模态天线的驱动元件相关联的辐射图。此外,第二模态天线的至少一个寄生元件被定位成使得控制第二模态天线的有源元件以调整第二模态天线的至少一个寄生元件的电抗影响与第一模态天线、第三模态天线或第四模态天线中的至少一个相关联的辐射图。
11.参考以下描述和所附权利要求,各种实施例的这些和其他特征、方面和优点将变得更好理解。并入本说明书并构成其一部分的附图示出了本公开的实施例,并与描述一起用于解释相关原理。
附图说明
12.参考附图,在说明书中阐述了针对本领域普通技术人员的实施例的详细讨论,其中:
13.图1描绘了根据本公开的示例实施例的多模式天线系统的组件的框图;
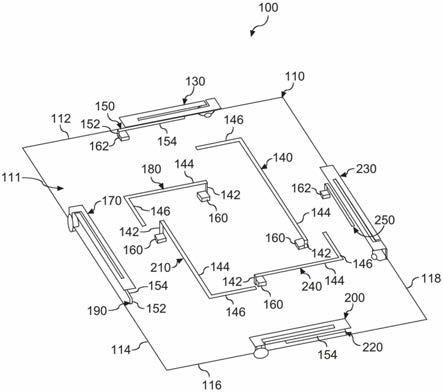
14.图2描绘了根据本公开的示例实施例的多模式天线系统;
15.图3描绘了根据本公开的示例实施例的与多模式天线系统相关联的回波损耗的图形表示;
16.图4描绘了根据本公开的示例实施例的与多模式天线系统相关联的回波损耗的另一图形表示;
17.图5描绘了根据本公开的示例实施例的多模式天线系统的效率的图形表示;
18.图6描绘了根据本公开的示例实施例的多模式天线系统的效率的另一图形表示;
19.图7描绘了根据本公开的示例实施例的当调谐到第一频率时,与多模式天线系统相关联的方位角(azimuthal)辐射图的图形表示;
20.图8描绘了根据本公开的示例实施例的当调谐到第一频率时,与多模式天线系统相关联的仰角(elevation)辐射图的图形表示;
21.图9描绘了根据本公开的示例实施例的当调谐到第一频率时,与多模式天线系统相关联的仰角辐射图的另一图形表示;
22.图10描绘了根据本公开的示例实施例的当调谐到第一频率时,与多模式天线系统相关联的方位角辐射图的图形表示;
23.图11描绘了根据本公开的示例实施例的当调谐到第一频率时,与多模式天线系统相关联的仰角辐射图的图形表示;
24.图12描绘了根据本公开的示例实施例的当调谐到第一频率时,与多模式天线系统相关联的仰角辐射图的另一图形表示;
25.图13描绘了根据本公开的示例实施例的多模式天线系统的另一示例实施例;
26.图14描绘了根据本公开的示例实施例的多模式天线系统的又一示例实施例;以及
27.图15描绘了根据本公开的示例实施例的控制器的组件。
具体实施方式
28.现在将详细参考实施例,这些实施例一个或多个示例在附图中示出。每个示例是通过对实施例的解释来提供的,而不是对本公开的限制。事实上,对于本领域的技术人员来说显而易见的是,在不脱离本公开的范围或精神的情况下,可以对实施例进行各种修改和变化。例如,作为一个实施例的一部分示出或描述的特征可以与另一个实施例一起使用以产生又一个实施例。因此,本公开的方面旨在覆盖这些修改和变化。
29.本公开的示例方面针对多模式天线系统。在一些实施方式中,多模式天线系统可以是多输入多输出(mimo)天线系统,诸如2
×
2mimo系统或4
×
4mimo系统。
30.虽然为了说明和讨论的目的,参考mimo系统讨论了本公开,但是本领域的普通技术人员使用本文提供的公开内容将会理解,多模式天线系统在不偏离本公开的范围的情况下可以用于分集应用、阵列应用和其他应用。
31.在一些实施例中,多模式天线系统可以包括布置在电路板上(例如,布置在导电接地平面上)的多个模态天线。例如,该系统可以包括可以以多种模式配置的第一模态天线。多种模式中的每一种模式可以具有不同的辐射图。该系统还可以包括可以多种模式配置的第二模态天线。第二模态天线的多种模式中的每一个也可以具有不同的辐射图。每个模态天线(例如,第一模态天线、第二模态天线等)可以被配置为在mimo系统中通过不同信道进行接收和发送。
32.第一模态天线和第二模态天线可以各自包括驱动元件和至少一个寄生元件。此外,第一模态天线和第二模态天线可以各自包括有源元件,该有源元件被配置为通过可变电抗或对地短路来改变至少一个寄生元件的电抗。还应当理解,有源元件可以包括可调谐电容器、mems设备、可调谐电感器、开关(例如,单极四掷)、可调谐移相器、场效应晶体管、二极管或上述的组合中的至少一种。
33.在一些实施方式中,第一模态天线的驱动元件可以被定位在接地平面的第一边缘附近。此外,第二模态天线的驱动元件可以被定位在接地平面的第二边缘附近。接地平面的第二边缘可以基本上垂直于接地平面的第一边缘,使得第一模态天线和第二模态天线通常是垂直的(例如,与模态天线的长维度相关联的线可以以垂直方向15
°
内的角度相交)。在一些实施方式中,第二模态天线的驱动元件可以在基本上平行于接地平面的平面中相对于第一模态天线的驱动元件旋转。例如,第二模态天线的驱动元件可以在平面中相对于第一模态天线的驱动元件旋转大约90度。然而,应当理解,第二模态天线的驱动元件可以在平面中相对于第一模态天线的驱动元件旋转任何合适的量。
34.在一些实施方式中,第一模态天线的至少一个寄生元件可以包括第一寄生元件和
第二寄生元件。第一寄生元件可以布置在接地平面和第一模态天线的驱动元件之间限定的天线体积的外部。相反,第二寄生元件可以布置在天线体积内。
35.在一些实施方式中,第二模态天线的至少一个寄生元件可以包括第一寄生元件和第二寄生元件。第一寄生元件可以布置在接地平面和第二模态天线的驱动元件之间限定的天线体积的外部。相反,第二寄生元件可以布置在天线体积内。
36.在一些实施方式中,第一模态天线和第二模态天线两者的第一寄生元件都可以包括耦合到接地平面的第一线性部分。第一寄生元件还可以包括从第一线性部分延伸的第二线性部分。第二线性部分可以与接地平面间隔开,并且基本上垂直于第一线性部分。此外,第一寄生元件可以包括从第二线性部分延伸的第三线性部分。第三线性部分可以与接地平面间隔开,并且基本上垂直于第二线性部分。
37.在一些实施方式中,第二模态天线的第一寄生元件可以在基本上平行于接地平面的平面中相对于第一模态天线的第一寄生元件旋转。例如,第二模态天线的第一寄生元件可以在平面中相对于第一模态天线的第一寄生元件沿着平面旋转大约90度。然而,应当理解,第二模态天线的第一寄生元件可以在平面中旋转任何合适的量。
38.在一些实施例中,第一模态天线和第二模态天线可以被定位在电路板的接地平面上,使得与一个模态天线相关联的寄生元件可以用于影响其他模态天线的辐射图。例如,第一模态天线的辐射图可以经由对第二模态天线的第一寄生元件的电抗的调整来影响。同样,第二模态天线的辐射图可以经由对第一模态天线的第一寄生元件的电抗的调整而受到影响。以这种方式,可以生成第一模态天线和第二模态天线的附加模式(例如,辐射图)。
39.在一些实施方式中,多模式天线系统可以是4
×
4mimo系统,该系统包括布置在电路板的接地平面上的四个模态天线。四个模态天线中的每一个可以包括驱动元件和至少一个寄生元件。此外,四个模态天线中的每一个都可以包括有源调谐元件。有源调谐元件可以被配置为调整对应模态天线的至少一个寄生天线元件的电抗,以改变与对应模态天线的驱动元件相关联的辐射图。
40.在一些实施方式中,4
×
4mimo系统的第一模态天线的至少一个寄生元件可以被定位成使得控制第一模态天线的有源元件以调整第一模态天线的至少一个寄生元件的电抗影响与4
×
4mimo系统中的至少一个其他模态天线相关联的辐射图。更具体地说,第一模态天线的至少一个寄生元件影响与至少一个其他模态天线相关联的辐射,从而可以为至少一个其他模态天线生成附加模式。
41.本公开的多模式天线系统可以提供许多技术益处。例如,第一模态天线和第二模态天线可以相对于彼此定向,以便为第一模态天线和第二模态天线提供附加模式。附加模式可以允许多模式天线系统在更大的频率范围上提供各向同性(例如,全向)覆盖。例如,附加模式可以允许多模式天线系统在低频带(例如,700mhz至800mhz)和高频带(例如,1800mhz至2200mhz)两者提供各向同性覆盖。在分集应用中,可以增加多模式天线系统的分集增益。
42.如在说明书和所附权利要求中所使用的,术语“第一”和“第二”可以互换使用,以将一个组件与另一个组件区分开来,并且不旨在表示各个组件的位置或重要性。术语“大约”或“基本上”与数值结合使用意图指在所述数值的百分之十五(15%)以内。
43.现在参考图1,根据本公开的示例实施例,提供了多模式天线系统100的示例实施
例。如图所示,多模式天线系统100可以包括电路板110。在一些实施方式中,多模式天线系统100可以包括四个独立的模态天线(例如,第一模态天线120、第二模态天线122、第三模态天线124和第四模态天线126)。在替代实施方式中,多模式天线系统100可以包括更多或更少的模态天线。例如,在一些实施方式中,多模式天线系统100可以包括两个模态天线(例如,第一模态天线122和第二模态天线124)。应当理解,多个模态天线中的每一个都可以以多种模式配置。还应当理解,多种模式中的每一种模式可以具有不同的辐射图和/或偏振。
44.现在结合参考图1和图2,第一模态天线120可以布置在电路板110的接地平面111上。如图所示,第一模态天线120可以包括驱动元件130和至少一个寄生元件。在一些实施方式中,至少一个寄生元件可以包括第一寄生元件140和第二寄生元件150。如图所示,第一寄生元件140可以被定位在电路板110(例如,接地平面111)和驱动元件130之间限定的天线体积的外部。第一寄生元件140可以包括耦合到接地平面111的第一线性部分142。第一寄生元件140还可以包括从第一线性部分142延伸的第二线性部分144。第二线性部分可以与接地平面111间隔开,并且基本上垂直于第一线性部分142。第一寄生元件140还可以包括从第二线性部分144延伸的第三线性部分146。第三线性部分146可以与接地平面111间隔开,并且基本上垂直于第二线性部分144。
45.第一模态天线120可以包括第一有源元件160,该第一有源元件160被配置为通过可变电抗或对地短路来改变第一寄生元件140的电抗。还应当理解,第一有源元件160可以包括可调谐电容器、mems设备、可调谐电感器、开关(例如,单极四掷)、可调谐移相器、场效应晶体管或二极管中的至少一种。
46.在一些实施方式中,第一有源元件160可以是可配置为处于多种状态(例如,四种状态)的单极四极开关设备。当第一有源元件160被配置为处于第一状态时,第一寄生元件140可以耦合到电容器(例如,无源电容器、可调谐电容器)。以这种方式,第一寄生元件140可以耦合到电容性负载。相反,当第一有源元件160被配置为处于第二状态时,第一寄生元件140可以耦合到电感器。以这种方式,第一寄生元件140可以耦合到电感负载。当第一有源元件160被配置为处于第三状态时,第一寄生元件140可以耦合到电接地以产生短路。可选地,当第一有源元件160被配置为处于第四状态时,第一寄生元件140可以从电接地去耦合以产生开路。以这种方式,第一模态天线120可以至少四种不同的模式来配置。此外,四种不同状态中的每一种都可以具有不同的辐射图。然而,应当理解,第一有源元件160可以被配置成在任何合适数量的状态之间切换。
47.第一模态天线120的第二寄生元件150可以布置在电路板110(例如,接地平面111)和驱动元件130之间限定的天线体积内。如图所示,第二寄生元件150可以包括耦合到接地平面111的第一线性部分152。第二寄生元件150还可以包括从第一线性部分152延伸的第二线性部分154。第二线性部分154可以与接地平面111间隔开,并且基本上垂直于第一线性部分152。
48.第一模态天线120可以包括可操作地耦合到第二寄生元件150的第二有源元件162。第二有源元件162可以被配置成通过可变电抗或对地短路来改变第二寄生元件150的电抗。应当理解,改变第二寄生元件150的电抗会导致第一模态天线120的频移。还应当理解,第二有源元件162可以包括可调谐电容器、mems设备、可调谐电感器、开关、可调谐移相器、场效应晶体管或二极管中的至少一种。
49.第二模态天线122可以包括驱动元件170和至少一个寄生元件。在一些实施方式中,至少一个寄生元件可以包括第一寄生元件180和第二寄生元件190。第二模态天线122的第一寄生元件180可以基本上类似于第一模态天线120的第一寄生元件140。同样,第二模态天线122的第二寄生元件190可以基本上类似于第一模态天线120的第二寄生元件150。还应当理解,第二模态天线122可以包括类似于第一模态天线120的第一有源元件160和第二有源元件162的有源元件。
50.第三模态天线124可以包括驱动元件200和至少一个寄生元件。在一些实施方式中,至少一个寄生元件可以包括第一寄生元件210和第二寄生元件220。第三模态天线124的第一寄生元件210可以基本上类似于第一模态天线120的第一寄生元件140。同样,第三模态天线124的第二寄生元件220可以基本上类似于第一模态天线120的第二寄生元件150。还应当理解,第三模态天线124可以包括类似于第一模态天线120的第一有源元件160和第二有源元件162的有源元件。
51.第四模态天线126可以包括驱动元件230和至少一个寄生元件。在一些实施方式中,至少一个寄生元件可以包括第一寄生元件240和第二寄生元件250。第四模态天线126的第一寄生元件240可以基本上类似于第一模态天线120的第一寄生元件240。同样,第四模态天线126的第二寄生元件250可以基本上类似于第一模态天线120的第二寄生元件150。还应当理解,第四模态天线126可以包括类似于第一模态天线120的第一有源元件160和第二有源元件162的有源元件。
52.在一些实施方式中,第一模态天线120可以经由至少一个其他模态天线(例如,第二模态天线122、第三模态天线124、第四模态天线125)的第一有源元件160以一种或多种附加模式配置。例如,可以控制第二模态天线122的有源元件160来调整第二模态天线122的第一寄生元件180的电抗,以影响第一模态天线120的辐射图。更具体地,第二模态天线122的第一寄生元件180的电抗可以影响第一模态天线120的辐射图,从而提供第一模态天线的附加模式。在一些实施方式中,可以提供第一模态天线120的60种附加模式。应当理解,可以为第二模态天线122、第三模态天线124和第四模态天线126提供附加模式。以这种方式,在一些实施方式中,多模式天线系统100的每个模态天线可以以64种不同的模式来配置。这样,在一些实施方式中,图2的多模式天线系统100可以以256种不同的模式来配置。
53.在一些实施方式中,每个模态天线的驱动元件可以被定位在接地平面111的对应边缘附近。例如,第一模态天线120的驱动元件130可以被定位在接地平面111的第一边缘112附近。此外,第二模态天线122的驱动元件170可以被定位在接地平面111的第二边缘114附近。此外,第三模态天线124的驱动元件200可以被定位在接地平面111的第三边缘116附近。更进一步,第四模态天线126的驱动元件230可以被定位在接地平面111的第四边缘118附近。在一些实施方式中,电路板110的接地平面111可以具有正方形形状。
54.在一些实施方式中,多模式天线系统100的驱动元件可以沿着基本上平行于接地平面111的平面相对于彼此旋转。例如,第二模态天线122的驱动元件170可以在平面中相对于第一模态天线120的驱动元件130旋转大约90度。此外,第三模态天线124的驱动元件200可以在平面中相对于第二模态天线122的驱动元件170旋转大约90度。更进一步,第四模态天线126的驱动元件230可以在平面中相对于第三模态天线124的驱动元件200旋转大约90度。
55.在一些实施方式中,被包括在多模式天线系统100中的寄生天线元件可以在基本上平行于接地平面111的平面中相对于彼此旋转。例如,第二模态天线122的第一寄生元件180可以在平面中相对于第一模态天线120的第一寄生元件140旋转大约90度。此外,第三模态天线124的第一寄生元件210可以在平面中相对于第二模态天线122的第一寄生元件180旋转大约90度。更进一步,第四模态天线126的第一寄生元件240可以在平面中相对于第三模态天线124的第一寄生元件210旋转大约90度。
56.可选地或附加地,被包括在每个模态天线中的第二寄生元件可以在基本上平行于接地平面11的平面中相对于彼此旋转。例如,第二模态天线122的第二寄生元件190可以在平面中相对于第一模态天线120的第二寄生元件150旋转大约90度。此外,第三模态天线124的第二寄生元件220可以在平面中相对于第二模态天线122的第二寄生元件190旋转大约90度。更进一步,第四模态天线126的第二寄生元件250可以在平面中相对于第三模态天线124的第二寄生元件220旋转大约90度。
57.现在参考图3,根据本公开的示例实施例,提供了多模式天线系统100(图2)的回波损耗的图形表示。如图所示,图形示出了作为频率(沿水平轴以兆赫兹表示)的函数的、天线系统的回波损耗(沿垂直轴以分贝表示)。更具体地说,图形示出了在跨600兆赫兹(mhz)至800mhz的频率范围内的天线系统的损耗。如图所示,曲线410描绘了在频率范围内与多个操作模式中的第一操作模式相关联的回波损耗。曲线420描绘了在频率范围内与多个操作模式中的第二操作模式相关联的回波损耗。曲线430描绘了在频率范围内与多个操作模式中的第三操作模式相关联的回波损耗。曲线440描绘了在频率范围内与多个操作模式中的第四操作模式相关联的回波损耗。
58.现在参考图4,根据本公开的示例实施例,提供了多模式天线系统100(图2)的回波损耗的图形表示。如图所示,图形示出了作为频率(沿水平轴以兆赫兹表示)的函数的、天线系统的回波损耗(沿垂直轴以分贝表示)。更具体地说,图形示出了在跨1800兆赫兹(mhz)至2200mhz的频率范围内的天线系统的损耗。如图所示,曲线510描绘了在频率范围内与多个操作模式中的第一操作模式相关联的回波损耗。曲线520描绘了在频率范围内与多个操作模式中的第二操作模式相关联的回波损耗。曲线530描绘了在频率范围内与多个操作模式中的第三操作模式相关联的回波损耗。曲线540描绘了在频率范围内与多个操作模式中的第四操作模式相关联的回波损耗。
59.现在参考图5,根据本公开的示例实施例,提供了多模式天线系统100(图2)的效率的另一图形表示。如图所示,图形示出了作为频率(沿水平轴表示为兆赫兹)的函数的、天线系统的效率(沿垂直轴表示为百分比)。更具体地说,图形示出了在跨700mhz至800mhz的频率范围内的天线系统的效率。应当理解,多模式天线的效率表示传递到天线的功率相对于天线辐射的功率的比率。如图所示,曲线610描绘了在频率范围内的、多模式天线系统在多个操作模式中的第一操作模式下的效率。曲线620描绘了在频率范围内的、多模式天线系统在多个操作模式中的第二操作模式下的效率。曲线630描绘了在频率范围内的、多模式天线系统在多个操作模式中的第三操作模式下的效率。曲线640描绘了在频率范围内的、多模式天线系统在多个操作模式中的第四操作模式下的效率。
60.现在参考图6,根据本公开的示例实施例,提供了多模式天线系统100(图2)的效率的另一图形表示。如图所示,图形示出了作为频率(沿水平轴表示为兆赫兹)的函数的、天线
系统的效率(沿垂直轴表示为百分比)。更具体地说,图形示出了在跨1800mhz至2200mhz频率范围内的天线系统的效率。应当理解,多模式天线的效率表示传递到天线的功率相对于天线辐射的功率的比率。如图所示,曲线710描绘了在频率范围内的、多模式天线系统在多个操作模式中的第一操作模式下的效率。曲线720描绘了在频率范围内的、多模式天线系统在多个操作模式中的第二操作模式下的效率。曲线730描绘了在频率范围内的、多模式天线系统在多个操作模式中的第三操作模式下的效率。曲线740描绘了在频率范围内的、多模式天线系统在多个操作模式中的第四操作模式下的效率。
61.图7描绘了根据本公开的示例实施例的与多模式天线系统100(图2)相关联的方位角平面辐射图的图形表示。更具体地,图形描绘了当调谐到大约720mhz时与多模式天线系统100(图1和2)相关联的方位角辐射图。如图所示,当多模式天线系统100调谐到大约720mhz时,辐射图在方位角平面上几乎是各向同性的。
62.图8和图9描绘了根据本公开的示例实施例的与多模式天线系统100相关联的仰角平面辐射图的图形表示。更具体地,图形描绘了当调谐到大约720mhz时与多模式天线系统100相关联的仰角辐射图。如图所示,当多模式天线系统100调谐到大约720mhz时,辐射图在仰角平面上几乎是各向同性的。
63.图10描绘了根据本公开的示例实施例的与多模式天线系统100(图1和2)相关联的方位角平面辐射图的图形表示。更具体地,图形描绘了当调谐到大约2020mhz时与多模式天线系统100相关联的方位角辐射图。如图所示,当多模式天线系统100调谐到大约2020mhz时,辐射图在方位角平面上几乎是各向同性的。
64.图11和12描绘了根据本公开的示例实施例的与多模式天线系统100相关联的仰角平面辐射图的图形表示。更具体地,图形描绘了当调谐到大约2020mhz时与多模式天线系统100相关联的仰角辐射图。如图所示,当多模式天线系统100调谐到大约2020mhz时,辐射图在仰角平面上几乎是各向同性的。
65.现在参考图13,根据本公开的示例实施例,提供了多模式天线系统100的另一实施例。多模式天线系统100可以包括与上面参考图1和2讨论的多模式天线系统100相同或相似的组件。例如,图13的多模式天线系统100可以包括第一模态天线120和第二模态天线112。然而,图13的多模式天线系统100仅包括两个模态天线。
66.如图所示,第一模态天线120的驱动元件130可以被定位在接地平面111的第一边缘112附近。此外,第二模态天线122的驱动元件170可以被定位在接地平面111的第二边缘114附近。如图所示,接地平面111的第二边缘114可以基本上垂直于接地平面111的第一边缘112。另外,第二模态天线122的驱动元件170可以在基本上平行于接地平面111的平面中相对于第一模态天线的驱动元件130旋转。例如,第二模态天线122的驱动元件170可以在平面中相对于第一模态天线的驱动元件130旋转大约90度。然而,应当理解,第二模态天线122的驱动元件170可以在平面中旋转任何合适的量。
67.如图所示,第二模态天线122的第一寄生元件180可以在平面中相对于第一模态天线120的第一寄生元件140旋转。此外,第二模态天线122的第一寄生元件180的电抗可以被调整以影响第一模态天线120的辐射图。同样,第一模态天线的第一寄生元件140的电抗可以被调整以影响第二模态天线122的辐射图。以这种方式,如上所述,可以为第一模态天线120和第二模态天线122两者生成附加模式,以提高多模式天线系统100的覆盖。更具体地,
附加模式可以允许多模式天线系统100在更宽的频率范围上提供接近各向同性(例如,全向)的覆盖。此外,当多模式天线系统100用于分集应用时,可以增加多模式天线系统100的分集增益。
68.现在参考图14,根据本公开的示例实施例,多模式天线系统100可以是单输入单输出(siso)天线系统。如图所示,多模式天线系统100可以包括可配置为处于多种状态的开关设备310。例如,在一些实施方式中,开关设备310可以是可配置为处于四种状态(例如,p1、p2、p3和p4)的单极四掷开关。然而,应当理解,开关设备310可以被配置成处于任何数量的状态。还应当理解,开关设备310可以包括可配置为处于多种状态的任何合适类型的开关设备。例如,在一些实施方式中,开关设备310可以包括一个或多个晶体管(例如,mosfets、igbt等)。如下文将更详细讨论的,通信地耦合到开关设备310的控制器400(图15)可以被配置为控制开关设备310的操作,以选择性地将天线系统100的对应模态天线120、122、124、126耦合到被配置为提供rf信号322的rf源320。
69.当开关设备310处于第一状态p1时,开关设备310经由一个或多个导体314(例如,导线)耦合到第一模态天线120。以这种方式,rf信号322可以经由开关设备310被提供给第一模态天线120。更具体地,rf信号322可以被提供给第一模态天线120的驱动元件130。如上所述,第一模态天线120的第一有源元件160可以调整第一寄生元件140的电抗,从而以多种不同的模式之一来配置驱动元件130。此外,每个模式可以具有不同的辐射图。以这种方式,第一有源元件160可以调整第一寄生元件140的电抗,以改变驱动元件130的辐射图。如图所示,在一些实施方式中,第一有源元件160可以调整第一寄生元件140的电抗,从而以四种不同的模式(例如,m1、m2、m3和m4)之一来配置驱动元件130。然而,应当理解,第一模态天线120的驱动元件130可以经由对第一寄生元件140的电抗的调整来以任何合适数量的不同模式来配置。
70.当开关设备310处于第二状态p2时,开关设备310经由一个或多个导体316(例如,导线)耦合到第二模态天线122。以这种方式,rf信号322可以经由开关设备310被提供给第二模态天线122。更具体地,rf信号322可以被提供给第二模态天线122的驱动驱动元件170。如上所述,第二模态天线122的第一有源元件160可以调整第一寄生元件180的电抗,从而以多种不同的模式之一来配置驱动驱动元件170。此外,每个模式可以具有不同的辐射图。以这种方式,第一有源元件160可以调整第一寄生元件180的电抗,以改变驱动驱动元件170的辐射图。如图所示,在一些实施方式中,第一有源元件160可以调整第一寄生元件180的电抗,从而以四种不同的模式(例如,m5、m6、m7和m8)之一来配置驱动驱动元件170。然而,应当理解,第二模态天线122的驱动驱动元件170可以经由对第一寄生元件180的电抗的调整来以任何合适数量的不同模式来配置。
71.当开关设备310处于第三状态p3时,开关设备310经由一个或多个导体318(例如,导线)耦合到第三模态天线124。以这种方式,rf信号322可以经由开关设备310被提供给第三模态天线124。更具体地,rf信号322可以被提供给第三模态天线124的驱动驱动元件200。如上所述,第三模态天线124的第一有源元件160可以调整第一寄生元件210的电抗,从而以多种不同的模式之一来配置驱动元件200。此外,每个模式可以具有不同的辐射图。以这种方式,第一有源元件160可以调整第一寄生元件210的电抗,以改变驱动元件200的辐射图。如图所示,在一些实施方式中,第一有源元件160可以调整第一寄生元件210的电抗,从而以
四种不同的模式(例如,m9、m10、m11和m12)之一来配置驱动元件200。然而,应当理解,第三模态天线124的驱动元件200可以经由对第一寄生元件210的电抗的调整来以任何合适数量的不同模式来配置。
72.当开关设备310处于第四状态p4时,开关设备310经由一个或多个导体319(例如,导线)耦合到第四模态天线126。以这种方式,rf信号322可以经由开关设备310被提供给第四模态天线126。更具体地,rf信号322可以被提供给第四模态天线126的驱动元件230。如上所述,第四模态天线126的第一有源元件160可以调整第一寄生元件240的电抗,从而以多种不同的模式之一来配置驱动元件230。此外,每个模式可以具有不同的辐射图。以这种方式,第一有源元件160可以调整第一寄生元件240的电抗,以改变驱动元件230的辐射图。如图所示,在一些实施方式中,第一有源元件160可以调整第一寄生元件240的电抗,从而以四种不同的模式(例如,m13、m14、m15和m16)之一来配置驱动元件230。然而,应当理解,第四模态天线126的驱动元件230可以经由对第一寄生元件240的电抗的调整来以任何合适数量的不同模式来配置。
73.如图所示,图14的天线系统100可以以十六种不同的模式(例如,m1、m2、m3、
……
m16)来配置。此外,十六种不同的模式中的每一种模式都可以具有不同的辐射图。然而,应当理解,天线系统100可以以更多或更少的模式来配置。此外,尽管天线系统100被示出为发射(tx)电路,但是应当理解,天线系统100可以被实施为接收(rx)电路,其中一个或多个rf信号经由模态天线120、122、124、126之一接收,并且经由开关设备310被提供给天线系统100的一个或多个组件(例如,滤波器、处理器等)。
74.在一些实施方式中,天线系统100可以实施为相控阵天线系统。例如,模态天线120、122、124、126的驱动元件130、170、200、230可以实施被为天线阵列。更具体地,移相器(未示出)可以耦合在rf源320和对应的驱动元件130、170、200、230之间。以这种方式,由驱动元件130、170、200、230中的每一个发射的rf信号的相位可以被控制,使得天线系统100的辐射图(例如,波束)可以在任何给定的方向上被操纵。此外,如上所述,每个模态天线120、122、124、126的第一寄生元件140、180、210、240可以调整对应的驱动元件130、170、200、230的辐射图,以进一步调整天线系统100的辐射图。以这种方式,可以提高阵列的增益和波束成形能力。
75.现在参考图15,根据本公开的示例实施例,提供了控制器400的组件的框图。如图所示,控制器400可以包括一个或多个处理器402,该一个或多个处理器402被配置为执行各种计算机实施的功能(例如,执行本文公开的方法、步骤、计算等)。如本文所使用的,术语“处理器”不仅指本领域中被称为包括在计算机中的集成电路,还指控制器、微控制器、微型计算机、可编程逻辑控制器(plc)、专用集成电路(asic)、现场可编程门阵列(fpga)和其他可编程电路。
76.在一些实施方式中,控制器400可以包括一个或多个存储器设备404。存储器设备404的示例可以包括计算机可读介质,包括但不限于非暂时性计算机可读介质,诸如ram、rom、硬盘驱动器、闪存驱动器或其他合适的存储器设备。一个或多个存储器设备404可以存储可由一个或多个处理器402访问的信息,包括可由一个或多个处理器402执行的计算机可读指令。计算机可读指令可以是任何指令集,该指令集在由一个或多个处理器402执行时,使得一个或多个处理器402执行操作,诸如控制开关设备310和对应的模态天线的第一寄生
元件160的操作。计算机可读指令可以是用任何合适的编程语言编写的软件,或者可以在硬件中实施。
77.在一些实施方式中,控制器400可以包括通信模块406,以促进控制器400和天线系统100(图1、13和14)的各种组件之间的通信。例如,控制器400可以传送控制信号来控制开关设备310的操作。可选地或附加地,控制器400可以传送控制信号来控制模态天线120、122、124、126(图14)中的每一个的第一寄生元件160的操作。更进一步,在一些实施方式中,控制器400可以传送控制信号来控制模态天线120、122、124、126中的每一个的第二寄生元件162的操作。
78.虽然已经参考本发明的具体示例实施例详细描述了本主题,但是应当理解,本领域技术人员在理解了前述内容之后,可以容易地对这些实施例进行替代、变化和等同。因此,本公开的范围是示例性的,而不是限制性的,并且对于本领域普通技术人员来说显而易见的,本主题公开不排除对本主题的修改、变化和/或添加。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1