基板吸引保持构造以及基板搬运机器人的制作方法
1.本发明涉及基板吸引保持构造以及基板搬运机器人。
背景技术:
2.以往,公知有用于吸引并保持晶片等基板的基板吸引保持构造。例如,专利文献1所示的吸引保持装置具有对保持对象物亦即晶片进行真空吸附的吸附保持部件。在吸附保持部件形成有与晶片接触的接触部,在接触部的内部开口有真空管路。由此,能够通过真空吸附来保持晶片。另外,接触部及吸附保持部件的上表面被静电扩散性被膜涂覆,能够防止对晶片、吸附保持部件的带电。
3.专利文献1:日本特开2004-186355号公报
4.但是,在晶片之中存在翘曲的晶片,即使使用专利文献1中记载的吸引保持装置来对这种翘曲的晶片进行真空吸附,也存在由于吸附保持部件与晶片的间隙而无法进行晶片的真空吸附的情况。
技术实现要素:
5.为了解决上述课题,基板吸引保持构造具备:衬垫主体,具有环状的接触部、和将由上述接触部包围的第一真空室的底面封闭的底壁部,并且具有导电性;托板主体,具有上表面、和使该上表面凹陷而形成的第二真空室,并且具有导电性;支柱,设置于上述第二真空室或上述衬垫主体中的任一个,使上述衬垫主体的上述接触部在上述第二真空室之上位于比上述托板主体的上述上表面靠上方的位置,将上述衬垫主体支承为能够相对于上述第二真空室摆动,并且具有导电性;覆盖体,固定于上述托板主体,覆盖上述第二真空室;以及吸引通路,从上述第一真空室延伸,依次通过上述衬垫主体的上述底壁部、上述第二真空室以及上述托板主体,与真空源连接。
6.根据该结构,若将翘曲的基板放置在衬垫之上则衬垫摆动,能够使接触部沿着基板的下表面。由此,能够可靠地保持翘曲的基板,能够提高翘曲的基板的搬运效率。另外,能够在该翘曲的基板搬运时使基板的静电扩散,能够防止微粒向基板的附着,能够提高基板的加工工序的成品率。
7.本发明起到能够提高基板的搬运效率,并且提高基板的加工工序的成品率的效果。
附图说明
8.图1是表示设置有实施方式1所涉及的基板吸引保持构造的托板的结构例的俯视图。
9.图2是表示具备图1的托板的基板搬运机器人的结构例的侧视图。
10.图3是表示翘曲的晶片的一个例子的剖视图。
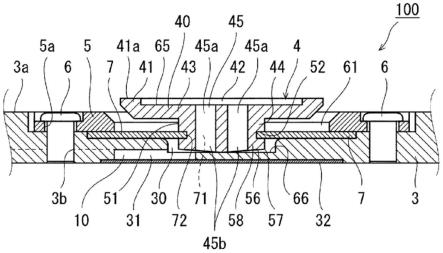
11.图4是表示图1的基板吸引保持构造的结构例的剖视图。
12.图5是表示图1的基板吸引保持构造的结构例的俯视图。
13.图6是表示图1的基板吸引保持构造保持基板的状态的剖视图。
14.图7是表示图1的基板吸引保持构造的衬垫的支柱的结构例的底面立体图。
15.图8是表示实施方式1所涉及的基板吸引保持构造的衬垫的支柱的变形例的底面立体图。
16.图9是表示实施方式1所涉及的基板吸引保持构造的衬垫的支柱的变形例的底面立体图。
17.图10是表示实施方式1所涉及的基板吸引保持构造的衬垫的支柱的变形例的底面立体图。
18.图11是表示实施方式1所涉及的基板吸引保持构造的衬垫的支柱的变形例的底面立体图。
19.图12是表示实施方式2所涉及的基板吸引保持构造的结构例的剖视图。
具体实施方式
20.以下,边参照附图,边对各实施方式进行说明。此外,并不通过本实施方式限定本发明。另外,以下,在全部附图中,对相同或相当的要素标注相同的附图标记,省略其重复的说明。
21.(实施方式1)
22.图1是表示设置有实施方式1所涉及的基板吸引保持构造100的托板9的结构例的俯视图。图2是表示具备托板9的基板搬运机器人1的结构例的侧视图。
23.如图1及图2所示,基板吸引保持构造100是设置于基板搬运机器人1的托板9的保持基板110的构造。托板9设置于机器人臂2的前端部,托板9和机器人臂2电连接。设置有基板吸引保持构造100的托板9构成吸引并保持基板110,并搬运已保持的基板110的所谓的真空型手部。特别是,该托板9是能够吸引并保持例如图3所示的被称呼为弓晶片(bow wafer)的像弓一样翘曲的晶片的构造。对于这种翘曲的晶片而言,其下表面中的与手部的支承部(衬垫4)接触的衬垫抵接区域111倾斜。另外,翘曲的晶片的翘曲方式的形式是碗型、圆顶型、卷曲型等多种多样,衬垫抵接区域111中的倾斜角度及倾斜方向并不恒定。
24.基板搬运机器人1例如移动机器人臂2,将收容于被称为晶片传送盒(front opening unified pod)的载体的多个基板110载置于托板9。在图1中,对于基板110而言,图示了晶片,但并不限于此,也可以是玻璃基板。然后,基板搬运机器人1移动机器人臂2,将其从载体取出,移送至规定位置。基板搬运机器人1例如为选择顺应性装配机器手臂型(scara型)的水平多关节机器人,托板9由基板搬运机器人1的机器人臂2三维地,即、在相互正交的3个轴向上移动。
25.基板吸引保持构造100例如设置为沿以保持于托板9的基板110的中心c为中心的圆周方向排列多个(例如3个)。由此,保持于托板9的基板110由基板吸引保持构造100在多个点支承从而被可靠地保持。基板吸引保持构造100具备设置于托板9的托板主体3的第二真空室30、衬垫4、覆盖体7(衬垫体支承体)、固定框5、紧固件6、吸引通路10以及真空源8。
26.托板主体3形成为在水平方向上延伸的薄板状,其上表面基本形成平坦面3a。托板主体3经由衬垫4而保持基板110。托板主体3例如由铝等具有导电性的材质构成。此外,也可
以取而代之地,针对托板主体3,对氧化铝等显示绝缘性的陶瓷实施电镀等表面处理,赋予导电性。而且,在托板主体3的设置基板吸引保持构造100的部分形成有3段台阶状的凹陷。
27.衬垫4与基板110接触,担负直接支承基板110的功能。另外,衬垫4形成从基板110朝向托板主体3延伸的吸引通路及电路的一部分。衬垫4包含导电性材料,例如,整体由导电性聚醚醚酮(poly ether ether ketone)树脂形成。具体而言,由含有碳的聚醚醚酮树脂形成。聚醚醚酮树脂是耐热性、机械强度优异的非弹性体。由此,能够抑制微粒的产生,能够提高基板110的加工工序的成品率。此外,也可以对不具有导电性的材质的衬垫4实施电镀等表面处理,赋予导电性。
28.衬垫4包括衬垫主体40和支柱44。衬垫主体40具有在水平方向上延伸的环状的接触部41。接触部41的顶部(上表面)是与基板110的下表面接触的基板支承面41a。而且,由接触部41包围的区域形成第一真空室42。而且,在接触部41的下缘连续设置有底壁部43,第一真空室42的底面65由底壁部43封闭。即,衬垫主体40整体呈浅盘状,在内部形成有在上方开口的空间亦即第一真空室42。
29.而且,圆柱状的支柱44从底壁部43的下表面朝向下方延伸。支柱44的圆筒形的外周面51具有比接触部41的直径小的直径(例如大约为1/2的直径),从底壁部43的下表面朝向下方延伸。在外周面51,在上下方向上的中间部,形成有沿外周面51的周向延伸的圆环状的凹槽52。而且,支柱44的底面56的外周缘57与外周面51的下缘相连。
30.而且,在支柱44的底面56形成有突起58。突起58形成为随着从外周缘57朝向内侧(支柱44的中心轴)而向下方突出的形状。具体而言,如图4及图7所示,突起58形成为圆锥形。但是,也可以取而代之地,突起58为圆锥台形(参照图8)或圆顶形(参照图9)。另外,突起58也可以形成为外周缘57的内侧的区域的一部分突出的形状。具体而言,也可以为在与外周缘57之间形成阶梯差的柱形(参照图10)、半球形(参照图11)。这样,底面56的内侧区域的一部分比在该内侧区域的外侧环绕内侧区域的外侧区域的一部分向下方突出。接触部41、底壁部43以及支柱44构成衬垫体。另外,突起58的顶部也可以位于支柱44的中心轴上。
31.而且,形成有贯通底壁部43及支柱44的衬垫内流路45。衬垫内流路45是与支柱44的中心轴平行地延伸并贯通衬垫4的内部的贯通孔,上端在衬垫4的上表面开口。具体而言,衬垫内流路45是包括形成于衬垫主体40的衬垫主体内流路45a、和形成于支柱44的支柱内流路45b的管路。衬垫主体内流路45a的上端在第一真空室42的底面65开口,与第一真空室42连续。而且,衬垫主体内流路45a向下方延伸,贯通底壁部43。支柱内流路45b的上端与衬垫主体内流路45a的下端连续,贯通支柱44。而且,支柱内流路45b的下端在支柱44的底面56开口。在本实施方式中,衬垫内流路45相对于支柱44的中心轴偏心地形成有2个,且形成于突起58的顶部的侧方。
32.第二真空室30形成于在托板主体3的上表面设置的凹陷中的相当于底部的部分。具体而言,3段台阶状的凹陷的最下层(上数第三层)的凹陷是第二真空室30。该第二真空室30收容衬垫内流路45的下端开口的衬垫4的支柱44的下端,由此,衬垫内流路45与第二真空室30连接。另外,第二真空室30的底面66平坦,在该底面66上载置衬垫4的突起58。由此,衬垫4能够采取在底面66之上直立的姿势,即,基板支承面41a位于水平面上的基准姿势(参照图4)。另外,衬垫4能够采取从基准姿势在以基板吸引保持构造100的中心为中心的径向d1以及与该径向d1正交的方向d2(参照图1)上摆动而倾斜的姿势,即基板支承面41a相对于水
平面倾斜的倾斜姿势(参照图6)。这样,支柱44以第二真空室30的底面66与支柱44的底面56接触的部分为摆动中心,将衬垫主体40支承为能够相对于第二真空室30摆动。
33.另外,通过在底面66上载置突起58,第二真空室30的底面66和支柱44的底面56接触,经由突起58与第二真空室30的底面66的接触部分而电连接。由此,能够简化将衬垫4和托板主体3连接的电路的结构。
34.而且,衬垫4的高度尺寸,即、从接触部41的上端到支柱44的下端的高度尺寸形成得比从托板主体3的上表面的平坦面3a到第二真空室30的底面66的深度尺寸大。而且,以衬垫4的基板支承面41a在基准姿势及倾斜姿势两者中均位于比托板主体3的平坦面3a靠上方处的方式,规定上述的深度尺寸及高度尺寸,并以衬垫4的基板支承面41a不沉入托板主体3的凹陷中的方式规定。这样,支柱44使衬垫主体40的接触部41在第二真空室30之上位于比托板主体3的上表面(平坦面3a)靠上方处,并单点支承衬垫主体40。
35.而且,在托板主体3设置有托板主体内流路31。托板主体内流路31是一个端部与第二真空室30开口相连的管路。在本实施方式中,托板主体内流路31是形成于托板主体3的底面的较细的槽,从第二真空室30延伸到托板主体3的基端。而且,形成为在托板主体3安装覆盖托板主体3的底面的背盖32,从而从托板主体3的底面侧覆盖托板主体内流路31,形成通过托板主体3的内部的管路。
36.覆盖体7是在水平方向上延伸的较薄的板状的弹性体,具有弹性。而且,覆盖体7在中央形成有插通孔71。在插通孔71插通有支柱44。覆盖体7嵌入于上述的托板主体3的台阶状的凹陷中的构成第二真空室30的凹陷的上一层(上数第二层)的凹陷,覆盖体7的外周缘在俯视时位于第二真空室30的外侧,覆盖体7的下表面与托板主体3的上表面接触。这样,覆盖体7配置为覆盖第二真空室30,将第二真空室30封闭。另外,形成插通孔71的内周缘72嵌入于支柱44的凹槽52。由此,能够将第二真空室30更可靠地封闭。另外,换言之,覆盖体7在上表面与底面之间的位置支承衬垫4。
37.此外,覆盖体7也可以是具有导电性的材质。该情况下,衬垫4和托板主体3进一步经由覆盖体7而电连接。由此,即使是覆盖体7的内周缘72和支柱44接触,由上述突起58与第二真空室30的底面66的接触部分产生的将衬垫4和托板主体3连接的电路的导通发生不良的情况,也能够维持衬垫4与托板主体3的电连接。
38.固定框5是板状的框体,具有将覆盖体7的外周缘覆盖的形状。具体而言,固定框5形成为将角倒圆的四边形,且在固定框5的中央部形成有在俯视时比衬垫4大的内孔61。形成该内孔61的固定框5的内周缘是覆盖覆盖体7的外周缘的部位。另外,固定框5的外周缘嵌入并载置于上述的托板主体3的凹陷中的嵌入有覆盖体7的凹陷的上一层(上数第一层)的凹陷。固定框5的外周缘在俯视时位于覆盖体7的外周缘的外侧且托板主体3的上表面的平坦面3a与载置固定框5的凹陷的阶梯差的内侧。由此,通过将固定框5从托板主体3的凹陷的上方落入至该凹陷,能够不与衬垫4干涉地,将固定框5嵌入于托板主体3的凹陷。而且,在固定框5的四角,形成有用于插通紧固件6的贯通孔5a。
39.紧固件6是将固定框5能够接合分离地紧固于托板主体3的紧固件,例如为外螺纹。在托板主体3形成有以与嵌入于托板主体3的凹陷的固定框5的贯通孔5a同轴地定位的方式配置的内螺纹孔3b,紧固件6与该内螺纹孔3b旋合。
40.这样,固定框5的四角由紧固件6固定于托板主体3,从而覆盖体7的外周缘由固定
框5从上方推压于托板主体3,覆盖体7固定于托板主体3,配置于托板主体3。由此,衬垫4由覆盖体7从摆动姿势朝向基准姿势施力,由固定框5保持为采取基准姿势。另外,覆盖体7的内周缘72与直径比衬垫主体40小的支柱44接触,因此能够较大地取衬垫主体40的径向上的从覆盖体7的外周缘到内周缘72的部分为止的长度,覆盖体7能够较大地变形。由此,能够使衬垫主体40较大地倾斜。
41.而且,在该状态下,介于衬垫内流路45与托板主体内流路31之间的第二真空室30的上表面由覆盖体7封闭,第一真空室42、衬垫主体内流路45a、支柱内流路45b、第二真空室30以及托板主体内流路31形成连续的流路亦即吸引通路10。换言之,吸引通路10从第一真空室42延伸,依次通过衬垫主体40的底壁部43、支柱44、第二真空室30以及托板主体内流路31。而且,吸引通路10经由设置在机器人臂2内的管路,与真空源8连接。于是,通过真空源8的吸引动作,能够吸引第一真空室42的气体。在吸引通路10设置开闭阀,通过开闭阀将管路开放而能够进行第一真空室42内的气体的吸引。另外,通过开闭阀将管路封闭而能够停止第一真空室42的气体的吸引。真空源8例如为真空泵,配置于基板搬运机器人1的附近或内部。
42.另外,将紧固件6从托板主体3取下,在此基础上将固定框5从托板主体3取下,从而能够将衬垫4及覆盖体7取下。因此,能够容易地更换衬垫4。
43.如图6所示,对于这样构成的基板吸引保持构造100而言,若在基板支承面41a载置翘曲的基板110,则以突起58的下端为支点,衬垫主体40从图4所示的基准姿势向倾斜姿势倾斜,能够使基板支承面41a沿着基板110的下表面的衬垫抵接区域111,能够防止在基板支承面41a与衬垫抵接区域111之间产生缝隙。其结果是,通过真空源8进行吸引动作,能够使翘曲的基板110可靠地吸附于衬垫主体40。其结果是,即使高速地移动机器人臂2来搬运基板110,对已保持的基板110作用较大的加速度,也能够防止基板110产生位置偏移。其结果是,能够提高翘曲的基板110的搬运效率。
44.另外,如上所述,形成有从接触部41的基板支承面41a连续到机器人臂2的电路,基板110的衬垫抵接区域111与基板支承面41a抵接,从而基板110所带的静电经由支柱44的底面56与第二真空室30的底面66的接触部分而扩散至托板主体3,进一步扩散至机器人臂2。由此,能够防止搬运时的微粒的附着,能够提高成品率。
45.并且,衬垫主体40构成为能够在以基板吸引保持构造100的中心为中心的径向d1以及与该径向d1正交的方向d2上摆动,因此能够保持弯曲方式并不一样的基板110。
46.另外,若在保持翘曲的基板110时,通过用保持部件对保持基板110的端进行按压的所谓边缘夹持型的手部来进行保持,则存在基板110进一步翘曲,而保持力降低的情况,但基板吸引保持构造100吸引并保持基板110,因此能够更加可靠地保持翘曲的基板110。
47.(实施方式2)
48.以下,关于实施方式2的结构,以与实施方式1的不同点为中心进行阐述。图12是表示实施方式2所涉及的基板吸引保持构造的结构例的剖视图。
49.在上述实施方式1中,支柱44设置于衬垫主体40。与此相对地,在本实施方式中,如图12所示,支柱244设置于第二真空室30。具体而言,支柱244的下端固定于第二真空室30。而且,支柱244具有:外周面251,从第二真空室30的底面66向上方延伸;和上表面256,具有与外周面251相连的外周缘257。在上表面256,形成有随着从外周缘257朝向内侧而向上方
突出或外周缘257的内侧的区域的一部分向上方突出的突起258。
50.而且,衬垫主体240的底壁部243的底面随着从外周缘朝向中央部而向上方凹陷。而且,在支柱244的突起258载置底壁部243的底面的中央部,支柱244支承衬垫主体240。由此,衬垫主体240与上述实施方式1相同地,被支承为能够在基准姿势与倾斜姿势之间摆动。这样,支柱244使衬垫主体240的接触部41在第二真空室30之上位于比托板主体3的上表面(平坦面3a)靠上方处,单点支承衬垫主体240。
51.另外,衬垫主体内流路245a在底壁部243的底面开口,在该开口处与第二真空室30连接。而且,与第一真空室42相连的衬垫主体内流路245a、第二真空室30以及托板主体内流路31形成吸引通路210。换言之,吸引通路210从第一真空室42延伸,依次通过衬垫主体240的底壁部243、第二真空室30以及托板主体3。而且,吸引通路210经由设置在机器人臂2内的管路,与真空源8连接。
52.而且,在衬垫主体240的外周面的上下方向上的中间部形成有凹槽252。覆盖体7的内周缘72嵌入于该凹槽252,覆盖体7对衬垫主体240从摆动姿势朝向基准姿势施力,保持为衬垫主体240采取基准姿势。
53.根据上述说明,对于本领域技术人员,可清楚知道本实施方式的较多的改进、其他实施方式。因此,上述说明仅作为例示进行解释,将执行本发明的最好的方式以向本领域技术人员提示的目的提供。能够以不脱离本发明的精神的方式,实质上变更其构造以及/或者功能的详情。
54.附图标记说明
55.3...托板主体;7...覆盖体;8...真空源;10...吸引通路;30...第二真空室;40...衬垫主体;41...接触部;42...第一真空室;43...(第一真空室的)底壁部;44...支柱;65...(第一真空室的)底面;100...基板吸引保持构造
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1