用于在真空处理系统中运输装置的设备和方法与流程
1.本公开内容的实施方式涉及用于运输装置的设备和方法,特别是用于在处理期间运载基板或掩模的载体。更具体地,本公开内容涉及用于在真空处理系统中采用磁悬浮运输装置的设备和方法。
背景技术:
2.用于在基板上进行层沉积的技术包括例如溅射沉积、物理气相沉积(pvd)、化学气相沉积(cvd)和热蒸发。所涂覆的基板可用于若干应用和若干技术领域中。例如,所涂覆的基板可用于显示装置的领域中。显示装置可用于制造电视机屏幕、计算机显示器、移动电话、其他手持装置等来显示信息。典型地,通过用不同材料的层堆叠涂覆基板来生产显示器。
3.为了沉积层堆叠,可使用直列处理模块布置。直列处理系统包括多个处理模块,诸如沉积模块以及任选地另外的处理模块,例如清洁模块和/或蚀刻模块,其中处理方面随后在处理模块中进行,使得多个基板可在直列处理系统中连续地或准连续地进行处理。
4.基板可由载体(即,用于在真空系统中运载基板的运载装置)支撑。典型地使用运输系统来将运载基板的载体运输通过真空系统。运输系统可以是磁悬浮系统,使得可非接触地或基本上非接触地运输载体。
5.虽然磁悬浮系统具有许多优点,但是在真空系统中增强和加速装置的运输是有挑战性的。例如,真空处理系统中使用的磁悬浮系统中的驱动效率取决于需要考虑的多种因素。
6.因此,需要提供用于运输装置(诸如载体)的改善的系统和方法(特别是对于真空处理系统),该系统和方法克服了现有技术的问题中的至少一些问题。
技术实现要素:
7.鉴于上文,提供了一种用于在真空处理系统中移动装置的驱动单元。所述驱动单元包括:一个或多个电磁体,所述一个或多个电磁体具有一个或多个线圈;以及外壳,所述一个或多个电磁体布置在所述外壳内。所述外壳包括覆盖所述一个或多个电磁体的肋结构,所述肋结构具有在朝向所述一个或多个电磁体的共同方向上延伸的一个或多个结构。
8.根据本公开内容的一方面,提供了一种用于在真空处理系统中移动装置的驱动单元。所述驱动单元包括:一个或多个电磁体,所述一个或多个电磁体具有一个或多个芯;以及外壳,所述一个或多个电磁体布置在所述外壳内。所述外壳包括覆盖所述驱动单元的肋结构,所述肋结构具有在远离所述一个或多个电磁体的共同方向上延伸的一个或多个结构。
9.根据本公开内容的另一方面,提供了一种运输设备、特别是磁性运输设备。所述运输设备包括:根据本文描述的实施方式的驱动单元;以及装置,所述装置包括用于与所述驱动单元的所述一个或多个电磁体相互作用的一个或多个第一磁性对应物。
10.根据本公开内容的另一方面,提供了一种真空处理设备。所述真空处理设备包括:一个或多个真空腔室;以及根据本文描述的实施方式的运输设备,所述运输设备设置在所述一个或多个真空腔室内部。
11.根据本公开内容的另一方面,提供了一种用于移动装置的方法。所述方法包括:提供具有外壳和肋结构的驱动单元,所述肋结构包括在共同方向上延伸并覆盖布置在所述外壳中的一个或多个电磁体的一个或多个结构;以及通过使用所述驱动单元来移动所述装置。
12.实施方式还涉及用于进行所公开的方法的设备并且包括用于执行每个描述的方法方面的设备部分。这些方法方面可借助于硬件部件、由适当软件编程的计算机、这两者的任何组合或以任何其他方式执行。此外,根据本公开内容的实施方式还涉及用于操作所描述的设备的方法。它包括了用于进行所述设备的每一功能的方法方面。
附图说明
13.为了可详细地理解本公开内容的上文记载的特征,可参考实施方式来得到上文简要地概述的本公开内容的更特别的描述。附图涉及本公开内容的实施方式并被描述如下:
14.图1示出了根据本文描述的实施方式的驱动单元和装置的侧视图;
15.图2示出了根据本文描述的实施方式的驱动单元的侧视图;
16.图3a示出了根据本文描述的实施方式的驱动单元的前视图;
17.图3b示出了根据本文描述的实施方式的肋结构的底视图;
18.图4示出了根据本文描述的实施方式的真空处理设备;并且
19.图5示出了根据本文描述的实施方式的方法的流程图。
具体实施方式
20.现在将详细地参考本公开内容的各种实施方式,这些实施方式的一个或多个示例示出于各图中。在以下对附图的描述中,相同的附图标记是指相同的部件。一般来讲,仅描述了相对于各别实施方式的差异。每个示例以说明本公开内容的方式提供,并且不意在作为本公开内容的限制。另外,被示出或描述为一个实施方式的部分的特征可在其他实施方式上或结合任何其他实施方式使用,以产生又一个实施方式。说明书旨在包括此类修改和变化。
21.在真空处理系统中,装置的运输是确保元件的连续处理和高成品率的基本过程。例如,装置可以是支撑要在真空处理系统中处理的基板的载体。
22.为了允许平稳运输,悬浮运输设备可用于在真空处理系统内运输装置。例如,可使用用于将装置运输通过系统的磁悬浮系统。除其他特征外,这些系统可包括驱动单元,例如线性马达,以用于以基本上非接触方式提供装置的移动。
23.驱动单元通常包括若干致动器或电磁体,这些致动器或电磁体向布置在要运输的装置处的若干磁性对应物提供力,使得该装置可沿驱动单元在运输方向上移动。然而,在真空环境中提供驱动单元是有挑战性的,因为电磁体的许多机械和电气部件是不支持真空的。例如,在真空环境中提供电磁体可能导致大脱气率和处理系统污染。
24.此外,在要运输的装置与驱动单元之间的距离可能影响装置的运输。特别是,距离
越大,从驱动单元朝向装置的力的传递越差。然而,该距离也取决于设置在驱动单元中的电磁体,尤其是取决于用于将电磁体与驱动单元的周围环境(例如,与真空环境)分离的屏蔽件的厚度。例如,驱动单元的常规膜屏蔽件通常包括相对高的厚度以提供机械稳定性并承受在真空处理系统中在驱动单元与真空环境之间出现的压力差。
25.鉴于上文,提供一种适合在真空环境中使用并提供改善的运输的驱动单元是有益的。
26.根据本文描述的实施方式,提供了用于在真空处理系统中移动装置的驱动单元。驱动单元包括:一个或多个电磁体,该一个或多个电磁体具有一个或多个线圈;以及外壳。一个或多个电磁体布置在外壳内。外壳进一步包括覆盖一个或多个电磁体的肋结构。肋结构进一步具有在朝向一个或多个电磁体的共同方向上延伸的一个或多个结构。
27.根据本文描述的另外的实施方式,提供了用于在真空处理系统中移动装置的驱动单元。驱动单元包括:一个或多个电磁体,该一个或多个电磁体具有一个或多个芯;以及外壳。一个或多个电磁体布置在外壳内。外壳进一步包括覆盖一个或多个电磁体的肋结构。肋结构进一步具有在远离一个或多个电磁体的共同方向上延伸的一个或多个结构。
28.将理解,本文描述的实施方式可提供基本上类似的问题的替代解决方案(特别是关于独立权利要求)。
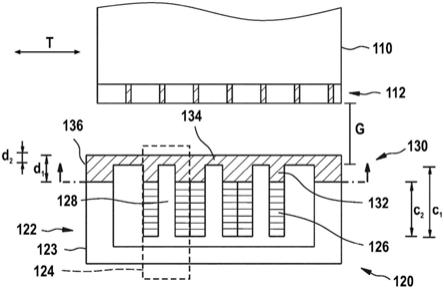
29.示例性参考图1,根据本文的实施方式,提供了驱动单元120和装置110。驱动单元可被配置为向装置110提供在运输方向t上的移动。驱动单元120包括一个或多个电磁体124。装置可包括一个或多个第二磁性对应物112。一个或多个第二磁性对应物112可与驱动单元的一个或多个电磁体磁性相互作用,使得向装置110提供移动。在装置110和驱动单元120、即一个或多个电磁体124之间,可提供间隙g。有利地,通过提供根据本文描述的实施方式的驱动单元,间隙g的宽度可被提供得尽可能窄。
30.电磁体包括一个或多个线圈126。驱动单元120包括外壳122,一个或多个电磁体布置在该外壳中。外壳122进一步包括肋结构130,该肋结构具有一个或多个结构132。该一个或多个结构在朝向一个或多个电磁体的共同方向上(例如在朝向一个或多个线圈126的共同方向上)延伸。
31.根据实施方式,多个一个或多个电磁体124可以重复方式彼此紧邻地提供。多个一个或多个电磁体124可在运输方向t上顺序地布置。换句话说,多个一个或多个电磁体124可被提供为串联连接。另外,一个或多个电磁体124可被单独地控制,例如一个或多个电磁体可被单独地供电。
32.进一步详细地,一个或多个电磁体124可进一步包括一个或多个芯128。一个或多个线圈126可围绕一个或多个芯128缠绕,使得在截面图中,一个线圈设置在一个芯的两侧上。因此,一个或多个线圈和一个或多个芯可彼此相邻地以重复方式提供。此外,驱动单元的区段可包括彼此紧邻的两个相邻线圈。
33.一个或多个芯128可包括磁性材料,即铁磁材料,诸如铁或类似材料。一个或多个线圈126可被提供为围绕一个或多个芯缠绕的导线。电磁体可提供用于作用在驱动单元旁边的装置上的磁力。特别地,一个或多个电磁体可设置在装置下方并且可作用于布置在装置处的磁性对应物。因此,可向装置提供在运输方向t上的移动。
34.因此,“驱动单元”可理解为被配置用于在运输方向t上移动如本文所描述的装置
110的单元。特别地,本文所描述的驱动单元可被配置为产生在运输方向t上作用在装置(例如载体)上的磁力。因此,驱动单元可以是线性马达。更特定地,用于移动或运输装置的驱动单元可被理解为被配置为提供驱动力的单元,其中装置从一个位置移动到另一个不同位置,例如沿运输方向的不同位置。
35.例如,装置可以是运载基板或掩模的载体。如关于图4更详细地解释的,装置可通过磁悬浮单元(即通过对抗重力的力)而悬浮。装置可在悬浮的同时由驱动单元在运输方向t(不同于平行于重力的方向)上移动。因此,可在不同于悬浮力的方向上提供驱动力。
36.如上所述,一个或多个电磁体124可包括一个或多个芯128,该一个或多个芯中的每个芯被布置成与一个或多个线圈126中的一个线圈相邻。每个芯可包括比线圈中的每一者的高度c2大的高度c1。换句话说,一个或多个芯可相对于一个或多个线圈从一个或多个电磁体延伸。因此,可提供一个或多个芯和一个或多个线圈的高度差。
37.根据本文描述的实施方式,驱动单元120包括外壳122,并且一个或多个电磁体124设置在该外壳内。外壳包括覆盖一个或多个电磁体的肋结构130。外壳可进一步包括主体123。肋结构可由外壳的主体123支撑。例如,肋结构和外壳的主体123可连接。外壳可包括在主体123与肋结构之间的密封件。例如,密封件可以是用于相对于周围环境密封外壳的o形环。密封件可以是支持真空的密封件。
38.另外,外壳可被配置为屏蔽所述一个或多个电磁体,特别是,在一个或多个电磁体124与驱动单元120的周围环境之间提供屏障。特别地,驱动单元的周围环境可包括真空环境。例如,驱动单元120可设置在真空环境中,例如设置在真空处理系统的一个或多个真空腔室中,如关于图4进一步解释的那样。因此,外壳可被配置为将一个或多个电磁体与真空环境屏蔽。
39.根据本文描述的实施方式,肋结构130可相对于一个或多个电磁体124的一个或多个线圈126对准。肋结构可包括在共同方向上延伸的一个或多个结构并可包括在一个或多个结构之间的一个或多个覆盖部分。一个或多个结构可与一个或多个线圈对准,并且一个或多个覆盖部分可与一个或多个芯对准。应当理解,虽然图1示出了布置在驱动单元的顶部处的肋结构和朝向驱动单元的底部延伸的一个或多个结构,但驱动单元也可设置成使得肋结构设置在驱动单元的一侧处,即在与图1的纸平面平行的平面内。因此,可运输装置,其中磁性对应物布置在装置的一侧处。
40.在整个本公开内容中使用的术语“肋结构”可理解为具有结构的物体,该结构可以是例如在共同方向上从共同基部延伸的突出部、肋或齿。延伸结构可由与肋结构的基部或覆盖部分相同的材料制成。通过提供从共同基部延伸的若干结构,肋结构可包括相对于彼此交替的若干最大点或区域和最小点或区域。例如,延伸结构的一最大点或区域后跟基部的一最小值点或区域等。因此,肋结构呈现耙状形状。一个或多个结构可具有也显示一个或多个结构的高度的相似最大点或区域。最小点或区域表示肋结构的一个或多个覆盖部分,即最小点或区域表示在一个或多个结构之间的一个或多个覆盖部分的高度。
41.在整个本公开内容中使用的表述“在朝向
……
的共同方向上延伸”或“在远离
……
的共同方向上延伸”可理解为,肋结构的一个或多个结构的至少一个维度,例如沿一个或多个结构的长度或高度的延度,到达与驱动单元的外壳的平面平行的一共同平面,即与外壳的侧面区域、顶部区域或底部区域中的任一者平行的平面。
42.根据实施方式,肋结构130可包括非磁性材料。例如,肋结构可由聚合物、陶瓷或不锈钢制成。有利地,肋结构可不干扰驱动单元的电磁体,即由非磁性材料制成的肋结构可提供良好的屏蔽性能,同时避免对为装置的运输提供的磁力的干扰。
43.根据可与本文描述的任何其他实施方式组合的实施方式,肋结构可包括圆周部分136。圆周部分136可包围肋结构的一个或多个结构。圆周部分136可布置在外壳的主体123处,即圆周部分136可连接到外壳的主体123以提供封闭系统。圆周部分可由与一个或多个结构相同的材料形成。将理解,圆周部分136可包括一个或多个结构,例如布置在肋结构的最外部分处并连接到外壳的主体的结构。圆周部分136和外壳的主体123可相对于彼此密封。例如,外壳可包括密封件,例如o形环,以密封肋结构和外壳的主体。
44.根据本文描述的实施方式,肋结构130包括在共同方向上延伸的一个或多个结构132。一个或多个结构可在朝向电磁体124的一个或多个线圈126的共同方向上延伸。换句话说,肋结构,例如所述一个或多个结构,可填充由一个或多个芯和一个或多个线圈的不同高度c1和c2提供的空间。根据实施方式,一个或多个结构可具有高度d1。
45.根据实施方式,肋结构可包括一个或多个覆盖部分134。一个或多个覆盖部分可布置在一个或多个结构之间,即一个或多个覆盖部分可连接一个或多个结构中的两个相邻结构。一个或多个覆盖部分134可具有小于肋结构的(即一个或多个结构的)高度d1的高度d2。例如,一个或多个覆盖部分的高度d2的范围可在0.3至1.5mm之间,更特别地是从0.5至1mm,或者甚至可更特别地是0.7mm。
46.根据实施方式,一个或多个结构可与一个或多个线圈126对准,并且一个或多个覆盖部分134可与一个或多个芯128对准。因此,一个或多个芯128可覆盖有具有高度d2的一个或多个覆盖部分,并且一个或多个线圈可覆盖有具有比高度d2大的高度d1的一个或多个结构。换句话说,与一个或多个芯相比,一个或多个线圈可覆盖有肋结构的较厚部分。
47.根据可与本文描述的任何其他实施方式组合的实施方式,高度d1和d2的高度差可对应于一个或多个芯与一个或多个线圈的长度差。因此,一个或多个结构132可填充由于一个或多个芯和一个或多个线圈的长度差而形成的空间。因此,肋结构可被配置为与在一个或多个芯与周围环境之间的屏障相比,在一个或多个线圈与驱动单元的周围环境之间提供更厚的屏障。换句话说,应当理解,本文所描述的肋结构有益地提供了膜状屏障,其可被配置为比常规膜屏蔽件更薄。另外,需注意,与根据现有技术的常规膜屏蔽件解决方案相比,肋结构可提供更高的机械稳定性,与此同时肋结构的厚度可减小。特别地,与在一个或多个芯128与要运输的装置的一个或多个第二磁性对应物112之间的距离相比,肋结构130的这样的布置可在一个或多个线圈126与该装置的一个或多个第二磁性对应物112之间提供更大的距离。
48.有利地,在一个或多个芯128与装置的一个或多个第二磁性对应物112之间的间隙g的宽度可不再受要在一个或多个线圈与一个或多个磁性对应物之间提供的距离的限制。换句话说,肋结构向驱动单元提供屏障性质并将一个或多个线圈与周围环境屏蔽,同时类似地使一个或多个芯能够与要运输的装置的一个或多个磁性对应物更密切地接触。进一步有利地,根据本文描述的实施方式中的任一者的肋结构的屏障性质提供高机械稳定性以承受驱动单元的外壳与真空环境之间的压力差。例如,在驱动单元的外壳内部可存在不同压力条件,例如大气压条件。
49.根据实施方式且示例性参考图2,本文提供驱动单元220。该驱动单元可基本上类似于如图1所示的驱动单元。该驱动单元包括外壳122,并且一个或多个电磁体224设置在该外壳内。外壳包括覆盖一个或多个电磁体的肋结构230。外壳可进一步包括主体223。应当理解,虽然图2示出了布置在驱动单元的顶部处的肋结构和朝向驱动单元的底部延伸的一个或多个结构,单驱动单元也可设置成使得肋结构设置在驱动单元的一侧处,即在与图2的纸平面平行的平面内。因此,可运输装置,其中磁性对应物布置在装置的一侧处。
50.根据本文描述的实施方式,电磁体224包括一个或多个芯228。一个或多个电磁体可进一步包括一个或多个线圈226。外壳222包括肋结构230。肋结构包括在远离一个或多个电磁体的共同方向上延伸的一个或多个结构232。特别地,一个或多个结构可在远离一个或多个电磁体224的一个或多个芯228的共同方向上延伸。
51.根据本文描述的实施方式,肋结构230可相对于一个或多个电磁体224的一个或多个芯128对准。肋结构可包括在远离一个或多个芯的共同方向上延伸的一个或多个结构232和在该一个或多个结构之间的一个或多个覆盖部分234。例如,一个或多个结构232可与一个或多个芯对准。换句话说,一个或多个结构可使电磁体的一个或多个芯伸长。在图2示例性示出的实施方式中,一个或多个芯的高度c1与一个或多个线圈的高度c2可基本上类似。然而,将理解,一个或多个芯和线圈也可包括不同高度。如关于图1所解释的,肋结构可被配置为使一个或多个电磁体与驱动单元的周围环境屏蔽,例如与其中可设置驱动单元的真空环境屏蔽。
52.根据本文描述的实施方式,肋结构230可包括铁磁材料。有利地,使用一个或多个电磁体产生的磁力可被传递通过肋结构的一个或多个结构。因此,磁力可由肋结构230延伸。肋结构和一个或多个芯可由相同材料制成。
53.根据实施方式,肋结构可包括一个或多个覆盖部分234。覆盖部分可与一个或多个线圈对准,以使一个或多个线圈与驱动单元220的周围环境屏蔽。一个或多个覆盖部分234可包括高度h2。高度h2可小于一个或多个结构的高度h1。特别地,高度h2可被选择为使得避免或减少通过一个或多个覆盖部分的电磁力通量。附加地或替代地,一个或多个线圈可包括长度c2,该长度小于一个或多个芯的高度c1。
54.有利地并示例性参考图2,具有其中一个或多个结构从一个或多个芯228延伸的肋结构230的驱动单元提供一个或多个线圈226与将用驱动单元运输的装置(图2中未示出)之间的距离,该距离大于一个或多个结构的高度h1。因此,该距离大于一个或多个芯228与装置之间的距离。因此,一个或多个芯可经由一个或多个结构提供的芯的延伸而与装置密切接触,同时确保一个或多个线圈与装置的一个或多个磁性对应物之间的足够大到确保无阻碍地运输装置的距离。
55.另外,有利地并且如上所述,肋结构提供高机械稳定性以承受可设置驱动单元的真空环境与驱动单元的外壳内部的具有不同压力条件的环境(例如大气环境)之间的压力差,同时提供肋结构的具有减小的厚度的区段以增强驱动单元提供的驱动力。
56.根据本文描述的实施方式,肋结构可包括圆周部分236,肋结构的圆周部分与外壳的主体223一起布置。肋结构的圆周部分可经由肋结构的一个或多个覆盖部分234连接到一个或多个结构232。圆周部分可由与一个或多个结构相同的材料形成。外壳可包括密封件,特别是o形环,以相对于外壳的主体密封肋结构,特别是圆周部分。另外地且如关于图1所解
释的,圆周部分236可包括一个或多个结构,例如,相对于外壳的主体布置在肋结构的最外部分处的结构。
57.根据实施方式并示例性参考图3a和图3b,提供了驱动单元320。该驱动单元可基本上类似于关于图1所示的驱动单元。例如,一个或多个芯可包括比一个或多个线圈的长度c2大的高度c1。
58.关于图3a和图3b所示的实施方式,肋结构330可包括圆周部分336。将理解,圆周部分336可包括一个或多个结构332,例如,布置在肋结构的最外部分处并连接到外壳的主体123的结构。特别地,圆周部分336可由一个或多个结构形成,即,由四个结构形成,这四个结构构建大小适于配合外壳的主体123并另外朝向一个或多个电磁体延伸的框架。一个或多个电磁体可包括一个或多个线圈126并可进一步包括一个或多个芯128。圆周部分336的结构可朝向一个或多个线圈延伸。圆周部分336可由外壳122的主体123支撑。
59.根据实施方式,肋结构330可包括相对于一个或多个芯128布置的连续覆盖部分334。“连续覆盖部分”可理解为肋结构的包括小于肋结构330的高度d1的高度d2并沿驱动单元320的尺寸、即在运输方向上延伸的区段。如图3b中示例性可见,连续覆盖部分可不被一个或多个结构中的另外的结构中断。连续覆盖部分334可设置在肋结构的中心部分处,即圆周部分336可在肋结构的任何一侧处具有连续宽度。
60.有利地,根据本文描述的实施方式中的任一者的驱动单元可相对于驱动单元的周围环境提供支持真空的屏障。因此,可将驱动单元设置在真空环境中,同时保护驱动单元的电磁体免受真空影响。
61.此外,已经发现,从驱动单元朝向装置的磁力施加,即从一个或多个电磁体朝向装置的磁性对应物施加的磁力,取决于在装置的磁性对应物与驱动单元的电磁体的一个或多个芯之间的间隙的宽度。间隙的宽度越小,从驱动单元到装置的磁力施加越好。因此,可通过减小驱动单元、即电磁体的一个或多个芯与装置之间的宽度来增强对装置的驱动力提供。
62.有利地,根据本文描述的实施方式的肋结构提供了在电磁体的一个或多个芯与装置的磁性对应物之间的间隙,该间隙显著地减小,使得驱动单元的电磁体的一个或多个芯和装置的一个或多个磁性对应物可在空间上密切接近地设置。因此,通过减小在芯与磁性对应物之间的间隙,可增加朝向装置的驱动力,并且装置的运输更高效且更快。此外,肋结构确保电磁体的线圈与磁性对应物之间的距离足够大,以确保不受阻碍的运输并避免在线圈和磁性对应物之间的不需要的相互作用。因此,根据本文描述的实施方式中的任一者的驱动单元提供了改善的装置运输,同时类似地提供了驱动单元的真空相容性。
63.示例性参考图4,示出了根据本文描述的实施方式的真空处理设备450的前视图。根据可与本文描述的任何其他实施方式组合的实施方式,真空处理设备450包括运输设备400和一个或多个真空腔室。可在一个或多个真空腔室中提供真空,即,可在一个或多个真空腔室中施加真空以产生真空环境。真空处理设备可被配置为用于材料沉积工艺。例如,真空处理设备可用于处理用于显示器制造沉积源的大面积基板。因此,真空处理装置可进一步包括处理装置,诸如蒸发源、溅射源或用于处理大面积基板的其他处理装置。
64.术语“真空”可在具有小于例如10毫巴的真空压力的技术真空的意义上进行理解。典型地,在本文所描述的真空腔室中的压力可以是在10-5
毫巴与约10-8
毫巴之间、更典型是
在10-5
毫巴与10-7
毫巴之间,以及甚至更典型是在约10-6
毫巴与约10-7
毫巴之间。在一些实施方式中,在一个或多个真空腔室中的总压力的范围可以是从约10-4
毫巴至约10-7
毫巴。因此,一个或多个真空腔室可以是“真空沉积腔室”,即,被配置用于真空沉积的真空腔室。
65.根据实施方式,运输设备400可包括用于无接触地使装置110悬浮的磁悬浮单元440,如图4示例性所示。特别地,磁悬浮单元440被配置为将装置110保持在运输空间中。运输空间可被理解为在沿运输路径在运输方向t上运输装置期间装置110所布置于的区。典型地,磁悬浮单元440布置在运输空间上方。特别地,如图4示例性所示,磁悬浮单元440被布置成与装置110的一个或多个第一磁性对应物411相互作用。
66.在本公开内容中,“磁悬浮单元”可被理解为被配置为通过使用磁力以非接触方式保持对象(例如,装置,诸如载体)的单元。在本公开内容中,术语“悬浮(levitating)”或“悬浮(levitation)”指代物体(例如,运载基板或掩模的载体)的状态,其中物体在没有机械接触或支撑的情况下漂浮。
67.根据可与本文描述的其他实施方式组合的实施方式,磁悬浮单元440可包括用于将装置110非接触地保持在运输空间中的一个或多个致动器441。例如,一个或多个致动器441可附接到真空处理设备的(例如,真空腔室的)上腔室壁452的外表面。
68.在本公开内容中,术语“非接触地悬浮”或“非接触地保持”可在重量(例如,载体的重量,特别是运载基板或掩模的载体的重量)不是由机械接触或机械力保持而是由磁力保持的意义上理解。换句话说,贯穿说明书使用的术语“非接触”可被理解为使用磁力而不是机械力、即接触力来将载体保持在悬浮或漂浮状态下。
69.在本公开内容中,磁悬浮单元的“致动器”可被理解为主动且可控制元件。特别地,一个或多个致动器可包括可控制磁体,诸如电磁体。一个或多个致动器的磁场可以是可主动地控制的,以用于维持和/或调整在磁悬浮单元与载体之间的距离。换句话说,磁悬浮单元的“致动器”可被理解为具有可控制且可调整磁场以提供作用在装置(例如,载体)上的磁悬浮力的元件。
70.如图4示例性所示,一个或多个第一磁性对应物411可布置在装置110的顶部部分处。装置的一个或多个第一磁性对应物411可与磁悬浮单元440的一个或多个致动器441磁相互作用。特别地,一个或多个第一磁性对应物411可以是无源磁性元件。例如,一个或多个第一磁性对应物411可由磁性材料(诸如铁磁材料、永磁体)制成,或者可具有永磁性质。
71.本文所使用的“无源磁性元件”或“无源磁体”可被理解为未被主动地控制(例如,经由反馈控制)的磁体。例如,任何输出参数(诸如无源磁体的磁场强度)都不根据输入参数(诸如距离)来控制。例如,“无源磁性元件”可包括一个或多个永磁体。替代地或另外地,“无源磁性元件”或“无源磁体”可包括可未被主动地控制的一个或多个电磁体。
72.根据实施方式,装置110可以是载体、特别是基板载体或掩模载体。然而,应当理解,本文所描述的真空处理设备450和/或运输设备400也可用于真空处理系统中采用的其他装置,例如处理装置,诸如沉积源。
73.装置110可由运输装置400在运输方向t上在真空处理设备450中移动,如图4示例性指示的。在图4中,运输方向t垂直于纸面。运输方向t典型地是基本上水平的方向(水平+/-10
°
)。在本公开内容中,术语“运输方向”可被理解为装置由真空处理设备沿运输路径运输的方向。运输路径可以是线性的或弯曲的。另外,运输方向可沿运输路径变化。另外,在图
4中,指示了竖直方向v和侧向方向l。
74.另外,如图4示例性所示,运输设备400包括用于在运输方向t上移动装置110的驱动单元120。驱动单元是根据本文的实施方式描述的驱动单元。将理解,驱动单元120的一个或多个电磁体124可表示电磁线性马达的定子部分。
75.根据可与本文描述的任何其他实施方式组合的实施方式,驱动单元的外壳可完全或至少部分地设置在真空环境外部,即在大气环境中,使得肋结构可提供在真空环境与大气环境之间的屏障。有利地,根据本文描述的实施方式中的任一者的肋结构提供了高机械稳定性并因此可承受在真空环境与大气环境之间的压力差。
76.另外,将理解,一个或多个电磁体124被布置为与装置110的一个或多个第二磁性对应物112相互作用。特别地,一个或多个第二磁性对应物112可设置在装置110的底部处。在装置运输期间,一个或多个第二磁性对应物112在运输方向t上移动,从而经过一个或多个电磁体124。因此,一个或多个电磁体124可被理解为电磁线性马达的定子,并且一个或多个第二磁性对应物112可被理解为电磁线性马达的动子部分。例如,电磁线性马达可以是异步线性马达。
77.因此,应当理解,装置的一个或多个第二磁性对应物112可与驱动单元120的一个或多个电磁体124磁相互作用。特别地,一个或多个第二磁性对应物112可为无源磁性元件。例如,一个或多个第二磁性对应物112可由磁性材料(诸如铁磁材料、永磁体)制成,或者可具有永磁性质。
78.换句话说,根据可与本文描述的任何其他实施方式组合的实施方式,一个或多个电磁体124被配置为特别是以非接触方式在运输方向t上移动装置。特别地,应当理解,一个或多个电磁体124可以是可被主动控制的,以用于在运输方向t上对装置110施加移动力。
79.因此,在本公开内容中,“运输设备”可理解为被配置用于在运输方向t上沿运输路径移动、特别是运输装置的系统或设备。特别地,运输设备可被配置为用于运输基本上竖直取向的装置。本文所使用的“基本上竖直”可涵盖与完全竖直取向的10
°
或更小的偏差。更特定地,可由运输设备移动的装置可以是载体。因此,用于移动装置的运输设备可以是用于在运输方向t上沿运输路径移动、特别是运输载体的载体运输设备。
80.根据实施方式并且如上所述,装置110可以是用于在真空处理设备中支撑掩模或基板的载体。在本公开内容中,“载体”可被理解为被配置为运载对象(例如,基板或掩模)通过真空环境的运载装置。特别地,载体可以是在处理系统中使用的基板载体或掩模载体,例如,用于竖直地处理基板。载体可包括载体主体和被配置为将对象(例如,基板或掩模)保持在该载体主体的对象支撑表面处的保持装置(例如,机械、静电或磁吸紧装置)。载体可被配置为运载大面积基板,即,具有1m2或更大、特别是5m2或更大或甚至是8m2或更大的尺寸的基板。运输和保持大且重的载体是有挑战性的,特别是使用磁悬浮时。
81.在本公开内容中,术语“基板”可特别地涵盖实质上非柔性基板,例如晶片、透明晶体(诸如蓝宝石等)的切片或玻璃板。然而,本公开内容不限于此,并且术语“基板”还可涵盖柔性基板(诸如卷材或箔)。术语“实质上非柔性”应当被理解为区分于“柔性”。特别地,实质上非柔性的基板可具有一定程度的柔性,例如具有0.5mm或更低的厚度的玻璃板,其中与柔性基板相比,实质上非柔性的基板的柔性小。根据本文描述的实施方式,基板可由适于材料沉积的任何材料制成。例如,基板可由选自由以下项组成的组中的材料制成:玻璃(例如,钙
钠玻璃、硼硅酸盐玻璃等)、金属、聚合物、陶瓷、化合物材料、碳纤维材料或可通过沉积工艺涂覆的任何其他材料或材料组合。
82.如上所述,装置可以是基板载体或掩模载体。特别地,载体可以是用于大面积基板的基板载体或用于掩蔽大面积基板的掩模的掩模载体。在本公开内容中,术语“大面积基板”是指具有面积为0.5m2或更大、特别是1m2或更大的主表面的基板。在一些实施方式中,大面积基板可以是第4.5代(其对应于约0.67m2的基板(0.73m
×
0.92m))、第5代(其对应于约1.4m2的基板(1.1m
×
1.3m))、第7.5代(其对应于约4.29m2的基板(1.95m
×
2.2m))、第8.5代(其对应于约5.7m2的基板(2.2m
×
2.5m)),或者甚至第10代(其对应于约8.7m2的基板(2.85m
×
3.05m))。可类似地实现甚至更高的代(诸如第11代和第12代)和对应的基板面积。
83.根据可与本文描述的任何其他实施方式组合的实施方式并且示例性参考图5,提供了用于移动装置的方法。该方法包括提供(由图5中的框570表示)具有外壳和肋结构的驱动单元。肋结构包括沿共同方向延伸并覆盖布置在外壳中的一个或多个电磁体的一个或多个结构。根据实施方式,可提供根据本文的实施方式所述的任何驱动单元。
84.该方法进一步包括通过使用驱动单元来移动(由图5中的框580表示)装置。根据实施方式,驱动单元可被配置为向装置提供平移移动。特别地,驱动单元可提供磁力,以用于沿运输方向平移地移动装置。
85.根据本文描述的实施方式,用于移动装置的方法可在真空环境中进行。例如,驱动单元可设置在真空环境中。有利地,该方法能够移动或运输装置,而同时避免产生污染真空工艺的颗粒。
86.根据实施方式,可磁悬浮并沿运输方向运输该装置。特别地,装置可在真空环境中、诸如在真空腔室中运输。
87.鉴于上文,应当理解,与现有技术相比,本公开内容的实施方式有益地提供驱动单元、运输设备、真空处理设备和用于移动装置的方法,它们在驱动单元在真空环境中的真空相容性和驱动效率方面得到改善,特别是在高质量显示器制造领域中如此。另外,本文描述的实施方式有益地提供与常规的运输设备相比更高效的装置运输。
88.虽然前述内容针对的是本公开内容的实施方式,但是在不脱离本公开内容的基本范围的情况下,可设想本公开内容的其他和进一步实施方式,并且本公开内容的范围由所附权利要求书确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1