原位全晶片计量系统的制作方法
1.本公开内容的实施方式一般涉及半导体制造设备。更具体地,本公开内容的实施方式涉及原位全晶片计量系统。
背景技术:
2.在半导体制造期间经常评估晶片和膜沉积。在制造期间,评估膜沉积工艺的进展(例如,厚度)或膜的性质(例如,密度)是有帮助的。只要计量不花费太多的时间,确定这些和其他膜参数的能力就可以降低缺陷率并提高制造工艺的总产量。
3.当前的计量解决方案包括独立式计量工具,如果层对氧化不敏感,或者如果在顶层上执行测量,则所述独立式计量工具提供良好的解决方案。独立式计量系统是大气或未原位提供或允许全晶片覆盖的系统。如果需要在真空中或层间进行测量,则使用固定位置计量系统。当前的计量技术使用若干单点测量来确定厚度和材料性质。一些当前系统使用多达625个或更多个单独测量点来评估晶片上的膜均匀性。固定位置的站无法传送全晶片均匀性信息。
4.由此,需要一种在不破坏真空的情况下确定全晶片计量的设备。
技术实现要素:
5.本公开内容的一个或多个实施方式涉及包括腔室主体的原位计量腔室,所述腔室主体具有界定内部空间的底部和侧壁。侧壁具有从中穿过而形成的开口。传感器盖界定内部空间并且具有内表面和外表面。基板支撑件在内部空间内并且具有面向传感器盖的内表面的支撑表面。传感器条连接到传感器盖。传感器条包括面向基板支撑件的支撑表面的多个传感器。多个传感器沿着传感器条以与中心轴线不同的半径定位。传感器条或基板支撑件中的一者经配置为相对于传感器条或基板支撑件中的另一者围绕中心轴线旋转。
6.本公开内容的附加实施方式涉及包括指令的非暂时性计算机可读介质,当由计量腔室的控制器执行所述指令时,导致所述腔室执行选自以下各项的一个或多个操作:使基板支撑件或传感器条中的一者相对于基板支撑件或传感器条中的另一者围绕中心轴线旋转;在基板支撑件的旋转期间从多个传感器获得数据,以针对不同半径处的每个传感器生成径向位置旋转角相关数据配置文件;以及从径向位置旋转角相关数据配置文件在传感器半径之间的位置处外推数据。
7.本公开内容的另外实施方式涉及测量基板上的膜的方法。使基板支撑件或传感器条中的一者相对于基板支撑件或传感器条中的另一者围绕中心轴线旋转。使用位于传感器条上的至少一个传感器收集来自基板的数据。至少一个传感器经配置为测量基板上的膜并且从每个传感器生成径向位置旋转角相关数据配置文件。基于径向位置旋转角相关数据配置文件,确定基板上的膜的性质。
附图说明
8.因此,为了能够详细理解本公开内容的上述特征所用方式,上文所简要概述的本公开内容的更具体的描述可以参考各实施方式进行,一些实施方式在附图中示出。然而,应注意,附图仅示出本公开内容的常见实施方式并且由此不被认为限制其范围,由于本公开内容可能允许其他等效实施方式。
9.图1图示了根据本公开内容的一个或多个实施方式的原位计量腔室的等角视图;
10.图2示出了沿着线2
‑2’
截取的图1的原位计量腔室的横截面图;
11.图3示出了根据本公开内容的一个或多个实施方式的传感器条;
12.图4示出了根据本公开内容的一个或多个实施方式的使用传感器条的基板测量;
13.图5示出了根据本公开内容的一个或多个实施方式的径向/弦向(chord)测量;和
14.图6a至图6d示出了根据本公开内容的一个或多个实施方式的用于生成径向/弦向测量的工艺。
具体实施方式
15.在描述本公开内容的若干示例性实施方式之前,将理解本公开内容不限于在以下描述中阐述的构造或处理步骤的细节。本公开内容能够具有其他实施方式并且以各种方式实践或执行。
16.如在本说明书和所附权利要求中所使用,术语“基板”是指工艺作用于其上的表面或表面的部分。本领域的技术人员还将理解,除非上下文另外明确指出,否则提及基板也可以仅指基板的一部分。另外,提及在基板上的沉积可以意指裸基板和其上沉积或形成有一个或多个膜或特征的基板两者。
17.如本文使用的“基板”是指在制造工艺期间在其上执行膜处理的基板上形成的任何基板或材料表面。例如,其上可以执行处理的基板表面包括材料,诸如硅、氧化硅、应变硅、绝缘体上硅(soi)、碳掺杂的氧化硅、非晶硅、掺杂硅、锗、砷化镓、玻璃、蓝宝石和任何其他材料,诸如金属、金属氮化物、金属合金和其他导电材料,这取决于应用。基板包括但不限于半导体晶片。基板可以暴露于预处理工艺来抛光、蚀刻、还原、氧化、羟基化、退火、紫外线固化、电子束固化和/或烘烤基板表面。除了在基板表面本身上直接膜处理之外,在本公开内容中,如下文更详细公开的,所公开的膜处理步骤中的任何步骤也可以在基板上形成的下层上执行,并且术语“基板表面”意欲包括如上下文指出的这种下层。因此,例如,在已将膜/层或部分膜/层沉积到基板表面上的情况下,新沉积的膜/层的已暴露表面变成基板表面。
18.本公开内容的一个或多个实施方式涉及在腔室盖上具有一个或多个反射计和/或椭偏仪的计量系统。晶片关于腔室盖的相对旋转提供了全晶片厚度图和材料性质。一些实施方式有利地提供将当前系统的能力扩展到全晶片计量系统并提供原位均匀性测绘的设备。
19.本公开内容的一个或多个实施方式有利地在不破坏真空的情况下允许晶片的全计量。一些实施方式的原位监测在层对氧或其他时间效应敏感的情况下或者若应当在没有破坏真空的情况下完成层间的测量,则允许测量。
20.本公开内容的一些实施方式提供了晶片直径上的反射计的组合,且旋转提供了在
数分钟内生成的高填充均匀性的图(多达1801个点)。在一些实施方式中,偏心定位一个或多个椭偏仪以提供材料成分信息。一个或多个实施方式有利地提供了设备,所述设备提供真空中的厚度均匀性图,其准确度在数分钟内低至0.1a。
21.一些实施方式在室温下或在没有特定温度控制的情况下操作。在晶片明显冷却或冷却到影响测量可靠性的点之前,可以将热晶片装载到计量腔室中并进行分析。在一些实施方式中,使用加热器来控制晶片温度。在一些实施方式中,使用本领域的技术人员已知的一个或多个温度测量系统来监测晶片温度。一些实施方式通过直接用ir照相机测量温度或使用反射计信号来测量和校正晶片温度来校准出温度效应。
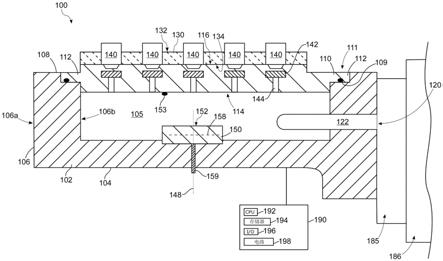
22.图1示出了根据本公开内容的一个或多个实施方式的原位计量腔室100的等角视图。图2示出了沿着线2
‑2’
截取的图1的原位计量腔室100的横截面图;
23.原位计量腔室100包括具有底部104和至少一个侧壁106的腔室主体102。腔室主体102和至少一个侧壁106界定腔室100的内部空间105。图1和图2中示出的实施方式图示了具有四个侧壁106的腔室100。本领域的技术人员将认识到,侧壁106的形状和/或侧壁106的数量可以是任何合适的形状或数量,并且不限制本公开内容的范围。在一些实施方式中,主体102的外侧形状106a不同于主体102的内侧形状106b。例如,所示出的实施方式从外侧表现为四边部件(图1),而内侧壁(图2)通常是圆形的,具有适当的位置特定改变以适应例如晶片装载/卸载。
24.在一些实施方式中,腔室100的侧壁106包括从中穿过而形成的开口120。开口120提供了通道122或其他合适的构造以允许晶片和/或机器人叶片从腔室100的外侧经过到内部空间105。
25.一些实施方式的腔室100包括顶壁108。如图所示,一些实施方式的顶壁108支撑传感器盖110。在一些实施方式中,传感器盖110和顶壁108是单个部件。作为单个部件,一些实施方式的传感器盖110/顶壁108支撑在侧壁106的顶部上。一些实施方式的传感器盖110包括悬臂111的外边缘112。悬臂111部分搁置在形成于顶壁108处的侧壁106中的突出部109上。传感器盖110界定内部空间105并且具有内表面114和外表面116。
26.基板支撑件150在内部空间105内。基板支撑件150具有面向传感器盖110的内表面114的支撑表面152。支撑表面152经配置为在测量期间固持晶片。在一些实施方式中,基板支撑件150包括一个或多个升降杆(未图示),用于将晶片从支撑表面152上的支撑位置移动到支撑表面152之上的装载/卸载位置。
27.取决于腔室100的配置,基板支撑件150是任何合适的尺寸。在一些实施方式中,基板支撑件150与待测量的晶片的直径大致相同。在一些实施方式中,基板支撑件150具有装配在叉状机器人叶片的尖齿之间的较小直径。这种配置允许机器人叶片提升和降低晶片而不是依赖升降杆。
28.传感器条130通过本领域的技术人员已知的任何合适的连接部件连接到传感器盖110。在一些实施方式中,使用可移除的连接将传感器条130连接到传感器盖110。例如,使用一个或多个紧固件(例如,螺钉)将一些实施方式的传感器条130连接到传感器盖110。在一些实施方式中,使用固定连接将传感器条130连接到传感器盖110。例如,将一些实施方式的传感器条130焊接到传感器盖110。
29.一些实施方式的传感器条130包括多个传感器140。传感器140经配置为面向基板
支撑件150的支撑表面152。一些实施方式的传感器140面向支撑表面152并且通过传感器盖110与支撑表面152分离。在一些实施方式中,如图2所示,传感器140可以穿过可选透镜142和孔144“看见”支撑表面152或支撑表面152上的晶片。可选透镜142可以是本领域的技术人员已知的任何合适类型的透镜或隔板。一些实施方式的可选透镜142是石英板,所述石英板不衰减或聚焦穿过透镜142的光。在一些实施方式中,可选透镜142经配置为聚焦或衰减在传感器140与内部空间105之间经过的光。
30.在一些实施方式中,多个传感器包括反射计和/或椭偏仪中的一个或多个。在一些实施方式中,多个传感器包括一个或多个反射计。在一些实施方式中,多个传感器包括一个或多个椭偏仪。在一些实施方式中,多个传感器包括一个以上的反射计和一个以上的椭偏仪。在一些实施方式中,传感器包括一个或多个反射计。在一些实施方式中,存在3至20个范围中的反射计。在一些实施方式中,存在4至16个、或5至14个、或6至10个范围中的反射计。在一些实施方式中,存在1至6个范围中的椭偏仪。在一些实施方式中,存在3或4个椭偏仪。
31.参看图3,多个传感器140沿着传感器条130的长度l以与中心轴线148不同的半径定位。中心轴线148是与传感器140所定位的传感器条或晶片的表面正交延伸的虚线。一些实施方式的中心轴线148被认为是传感器条130的一部分。一些实施方式的中心轴线被认为是基板支撑件150的一部分。从中心轴线148到传感器140的距离被认为是任何给定传感器140的半径。
32.出于描述目的,附图中的中心轴线148位于穿过传感器条130的点处。任何给定类型的传感器140中的每一者定位在距中心轴线148的不同距离处。图3中示出的实施方式具有传感器条130,所述传感器条具有七个反射计160和三个椭偏仪165。每个反射计经配置为测量与传感器条130大致对准的区域161。每个椭偏仪由源166和检测器167构成,源166和检测器167间隔开定位并且成角度以测量与传感器条130大致对准的区域168。所示出的实施方式在距中心轴线148的距离r1、r2、r3、r6、r7、r9和r10处具有反射计,其中距离r1、r2、r3、r6、r7、r9和r10中的每一者是不同的。所示出的实施方式具有在距中心轴线148的距离r4、r5和r8处对准的椭偏仪165,其中距离r4、r5和r8中的每一者是不同的。在一些实施方式中,反射计在相对于中心轴线148大致相等地间隔开的半径处。在一些实施方式中,椭偏仪在相对于中心轴线148大致相等地间隔开的半径处。
33.将传感器条130的长度l测量为从中心轴线148到最远传感器140的距离的两倍。例如,图3中的传感器条130的长度l为2
×
r10。在一些实施方式中,传感器条的长度l大于待测量的晶片的直径。在一些实施方式中,传感器条130的长度l在待测量的晶片的直径的
±
5%内。在一些实施方式中,传感器条130的长度l在待测量的晶片的直径的50%至98%的范围内。例如,如果要测量300mm的晶片,则在一些实施方式中,传感器条的长度在150mm至294mm的范围内。
34.传感器条130可以是任何合适的形状或构造,并且不严格限于矩形形状的部件。在一些实施方式中,如图3所示,传感器条130是矩形部件。在一些实施方式中,传感器条130是十字形状的部件或其他不规则形状的部件。传感器条130的形状经配置为支撑多个传感器。在一些实施方式中,包括不是传感器条130的一部分的附加传感器。例如,在图1中,传感器条130具有五个反射计160。椭偏仪165与传感器条130分离。在图3的示例中,椭偏仪165物理地连接到传感器条130。
35.腔室100经配置为使传感器条130或基板支撑件150中的一者相对于传感器条130或基板支撑件150中的另一者围绕中心轴线148旋转。在一些实施方式中,传感器条130是固定的,且基板支撑件150围绕中心轴线148旋转。在一些实施方式中,基板支撑件150是固定的,且传感器条130围绕中心轴线148旋转。
36.再次参看图1,本公开内容的一些实施方式涉及用于使用腔室100测量基板性质的方法。本公开内容的一些实施方式涉及测量基板上的膜的方法。基板支撑件或传感器条相对于基板支撑件或传感器条中的另一者围绕中心轴线旋转,并且使用位于传感器条上的至少一个传感器收集数据。至少一个传感器经配置为测量基板上的膜并且从每个传感器生成径向位置旋转角相关数据配置文件。基板上方的膜的性质基于径向位置旋转角相关数据配置文件。
37.在图4中示出的实施方式中,基板180相对于传感器条130围绕中心轴线148旋转。所示出的传感器条130的长度小于基板180的直径。多个传感器在旋转期间测量基板表面或基板表面上的膜。所示出的实施方式包括总共七个传感器:测量六个区域161的六个反射计和测量一个区域168的一个椭偏仪。传感器中的每一者与中心轴线148的距离不同,但是本领域的技术人员将认识到,不同的传感器类型可以处于相同的径向距离。例如,在一些实施方式中,椭偏仪距中心轴线148的径向距离与反射计中的一者相同,使得区域168和区域161重叠。在一些实施方式中,至少一个传感器包括至少一个反射计和至少一个椭偏仪,反射计中的每一者和椭偏仪中的每一者相对于中心轴线分别定位在与其他反射计或椭偏仪不同的半径处。
38.在一些实施方式中,腔室100包括耦接到传感器条130、传感器140、基板支撑件150(包括加热器158和/或旋转轴159)中的一个或多个的至少一个控制器190。在一些实施方式中,存在一个以上的连接到单独部件的控制器190,并且主控制处理器耦接到单独处理器中的每一者以控制腔室100。控制器190可以是任何形式的通用计算机处理器、微控制器、微处理器等中的一种,所述控制器可以用于工业设置中以控制各种腔室和子处理器。
39.在一些实施方式中,至少一个控制器190具有处理器192、耦接到处理器192的存储器194、耦接到处理器192的输入/输出装置196、以及用于在不同电子部件之间通信的支持电路198。一些实施方式的存储器194包括暂时性存储器(例如,随机存取存储器)和非暂时性存储器(例如,存储装置)中的一个或多个。
40.处理器的存储器194或计算机可读介质可以是一个或多个容易获得的存储器,诸如随机存取存储器(ram)、只读存储器(rom)、软盘、硬盘、或任何其他形式的本地或远程数字存储器。存储器194可以保留可由处理器192操作以控制腔室100的参数和部件的指令集。支持电路198耦接到处理器192,用于以传统方式支持处理器。例如,电路可以包括高速缓存、电源、时钟电路、输入/输出电路系统、子系统等等。
41.过程通常可以作为软件例程存储在存储器中,所述软件例程在由处理器执行时导致处理腔室执行本公开内容的工艺。软件例程还可以由第二处理器(未图示)存储和/或执行,所述第二处理器远离由处理器控制的硬件。本公开内容的方法中的一些或全部也可以在硬件中执行。因此,过程可以以软件实现并使用计算机系统以硬件(例如,专用集成电路、或其他类型的硬件实现方式)或作为软件和硬件的组合来执行。软件例程在由处理器执行时将通用计算机转换为控制腔室操作以执行过程的专用计算机(控制器)。
42.在一些实施方式中,控制器190具有一个或多个配置以执行单独的过程或子过程来执行方法。一些实施方式的控制器190连接到中间部件并且经配置为操作中间部件用于执行方法的功能。例如,一些实施方式的控制器190连接到并且经配置为控制气体阀、致动器、马达、狭缝阀、真空控制、传感器等中的一个或多个。
43.一些实施方式的控制器190具有选自以下各项的一种或多种配置:将基板移入或移出腔室100的配置;使基板支撑件或传感器条中的一个或多个相对于基板支撑件或传感器条中的另一者围绕中心轴线旋转的配置;使基板支撑件围绕中心轴线旋转的配置;使传感器条130围绕中心轴线旋转的配置;从一个或多个传感器140接收数据的配置;在基板支撑件的旋转期间从多个传感器获得数据以针对不同半径处的每个传感器生成径向位置旋转角相关数据配置文件的配置;加热基板支撑件的配置;测量晶片温度的配置;和/或从径向位置旋转角相关数据配置文件在传感器半径之间的位置处外推数据的配置。
44.本公开内容的一些实施方式涉及包括指令的非暂时性计算机可读介质,当由计量腔室的控制器执行所述指令时,导致所述腔室执行选自以下各项的一个或多个操作:使基板支撑件或传感器条中的一者相对于基板支撑件或传感器条中的另一者围绕中心轴线旋转;在基板支撑件的旋转期间从多个传感器获得数据,以针对不同半径处的每个传感器生成径向位置旋转角相关数据配置文件;以及从径向位置旋转角相关数据配置文件在传感器半径之间的位置处外推数据。在一些实施方式中,多个传感器140包括至少一个反射计160和至少一个椭偏仪165,所述反射计和椭偏仪经配置为测量基板支撑件150上的基板180的性质,并且非暂时性计算机可读介质包括指令,所述指令在由计量腔室的控制器执行时导致所述腔室进一步执行选自下列的一个或多个操作:根据来自反射计或椭偏仪数据中的一个或多个的径向位置旋转角相关数据配置文件来确定基板上的膜的厚度;或根据来自反射计或椭偏仪数据中的一个或多个的径向位置旋转角相关数据配置文件来确定基板上的膜的性质(除了厚度之外)。
45.在一些实施方式中,基板支撑件150经配置为围绕中心轴线148旋转,并且控制器190经配置为在旋转期间以预定速率旋转基板支撑件并从多个传感器140收集数据。在一些实施方式中,传感器条130经配置为围绕中心轴线148旋转,并且控制器190经配置为在旋转期间以预定速率旋转传感器条并从多个传感器收集数据。
46.在一些实施方式中,一个或多个传感器140在待测量的基板的直径外侧的半径处在传感器条130上定位。在一些实施方式中,控制器190进一步经配置为关闭传感器140中的一个或多个,使得不使用基板直径外侧的传感器140。
47.一些实施方式的基板支撑件150包括绝热材料。在一些实施方式中,将已经处于升高的温度的基板180装载到基板支撑件150和传感器条130的绝热材料上,并且在没有额外加热的情况下测量径向位置旋转角相关数据配置文件。
48.在一些实施方式中,基板支撑件150进一步包括经配置为在测量期间加热基板180的加热器158。在一些实施方式中,加热器158(图示为加热元件)嵌入绝热材料内。在一些实施方式中,加热器158嵌入导电材料内。如以这种方式使用的,术语“嵌入”意味着加热器158或者由基板支撑材料包围,或者在基板支撑件的顶表面处,使得加热器158夹在基板180与基板支撑件150之间。在一些实施方式中,定位温度传感器153以测量内部空间105内的温度。在一些实施方式中,定位温度传感器153以测量基板180的温度,同时从传感器140确定
径向位置旋转角相关数据配置文件。
49.在一些实施方式中,如图2所示,腔室100进一步包括门185,所述门经配置为打开和关闭腔室主体102的侧壁106中的开口120。门185可以是本领域的技术人员已知的任何合适的机构。例如,一些实施方式的门185包括狭缝阀,所述狭缝阀经配置为将腔室100的内部空间105与处理工具部件186(例如,传送站或处理腔室)隔离。
50.在一些实施方式中,腔室100包括一个或多个参考样品169。在一些实施方式中,参考样品100位于旋转卡盘(基板支撑件150)的表面上或定位在所述表面内。在一些实施方式中,参考样品169提供内部部件以测量和补偿光源、检测器和用于传送和收集来自样品的光的光路中的任何色度漂移。在一些实施方式中,基板支撑件150用作参考样品169。例如,基板支撑件150的整个表面或整个基板支撑主体。在另一实现方式中,可以将较小的样品嵌入卡盘中。在所示出的实施方式中,基板支撑件150具有经配置为用作参考样品169的区域或面积。在一些实施方式中,参考样品169嵌入基板支撑件150中。
51.在一些实施方式中,控制器190进一步经配置为分析参考样品169并且提供表示光源中的色度漂移、检测器改变或光路改变(例如,到窗、透镜、反射镜)中的一个或多个的改变的衰减因子。在一些实施方式中,控制器190经配置为在晶片测量的任何特定数量和/或之前分析参考样品169。在一些实施方式中,在晶片测量之前和之后测量参考样品169,用于在测量时间帧期间提供实时衰减漂移。在一些实施方式中,在每次晶片测量之前和之后测量参考样品169。
52.参考样品169可以是任何合适的材料。参看图5,在一些实施方式中,参考晶片181存储在腔室或处理工具内。例如,在一些实施方式中,参考晶片(例如,硅晶片)保持在处理工具部件186(例如,主机、中央传送站、工厂接口)内的存储区域187(例如,隔板、封闭区域)中。将一些实施方式的基板180装载到腔室100中并且周期性地测量以创建参考光谱。在一些实施方式中,参考光谱用于补偿光源、检测器和用于传送和收集来自样品的光的光路中的任何色度漂移。
53.参考样品169相对于传感器盖110的高度可以变化。在参考样品169嵌入基板支撑件150中的实施方式中,导致高度等于或低于支撑表面152。位于基板支撑件150上的基板180具有比基板支撑件150的支撑表面152更靠近传感器140的顶表面。换句话说,在测量期间,在基板支撑件150的表面处或基板支撑件150内的参考样品169具有与基板180不同的距离或高度。在一些实施方式中,参考晶片181以与所测量的晶片相同的高度定位在基板支撑150上,并且将经历相当的光学畸变源,所述光学畸变源不同地影响卡盘中的参考样品(例如,来自支撑卡盘机构中的几何畸变的变形)。在一些实施方式中,来自参考晶片181或参考样品169的参考光谱每天更新一次。在一些实施方式中,来自参考晶片181或参考样品169的参考光谱每天更新一次以上。在一些实施方式中,在参考光谱更新之间存在一天以上。
54.本公开内容的一些实施方式包括校准程序,所述校准程序从参考样品169或参考晶片181收集特定于角度的参考测量的阵列,用于补偿在测量期间由于晶片俯仰(pitch)和滚动而可能发生的光学畸变。在一些实施方式中,参考晶片181或参考样品169围绕中心轴线148旋转并由传感器盖测量。一些实施方式的测量值用作样品测量的基线、背景或参考光谱。
55.一些实施方式包括位移传感器154,用于在晶片旋转期间测量和补偿晶片高度和
角度的不可重复源(例如,俯仰和滚动)。在图2中示出的实施方式中,位移传感器154位于基板支撑件150上和/或基板支撑件150中。本领域的技术人员将认识到,位移传感器154的放置可以是取决于传感器的任何合适的位置。在一些实施方式中,包括一个或多个传感器以独立地测量晶片高度和角度的变化。在一些实施方式中,角度测量考虑晶片的俯仰和滚动。在一些实施方式中,记录每个测量通道的倾斜和高度的同心或同时测量。例如,与简单的俯仰和滚动以及样品的倾斜相比,覆盖了拓扑中更复杂的变化。在一些实施方式中,考虑了源于波形基板表面的样品角度和高度的变化。在一些实施方式中,使用三角测量传感器来测量位移。在一些实施方式中,在高度改变对于所有点是共同的多个点处有差异地执行倾斜/角度测量。例如,相位成像可以用于提供空间位移内容,其中位移对于所有数据像素(通道)是共同的并且被提取为高度。在一些实施方式中,可以使用非光学技术(例如,测斜仪)来直接测量旋转基座的摆动而对高度没有任何灵敏度。基座上的测斜仪可能不会捕获由于晶片的形状/轮廓的变化而引起的所有角度变化。一些实施方式的基于基座的测斜仪用于补偿作为角度变化的主要来源的基座摆动。
56.在一些实施方式中,来自温度传感器153的数据用于补偿可能影响冷却基板的光学性质的基板温度的变化。基板温度的改变将影响折射率(η)以及用光学传感器测量的膜的实际厚度和感知厚度。在一些实施方式中,控制器190经配置为在膜厚度测量期间测量基板的温度并且基于温度波动来补偿感知厚度。
57.在一些实施方式中,传感器条130或参考样品169包括专用参考光纤(未图示)以测量沿着测量光纤的路径的具有已知反射率的样品。一些实施方式的光纤经历与测量光纤相当的机械应力和相关联的光学畸变。光纤还将经历相对于适当均匀化的光源的变化的主要、共同的源,并且在一些实施方式中用于补偿源光的共同变化以及用于传送和收集来自晶片样品的光的光纤的机械引起的变化。
58.一些实施方式结合具有光学元件(例如,光管或扩散器)的光分配系统,以使分布在围绕公共光源均匀分布的多个光传送通道上的光均匀化。例如,在一些实施方式中,图3中的反射计160中的每一者共享公共光源,并且每个反射计160具有独立的检测器。
59.在一些实施方式中,存在一个测量与中心轴线148相距固定距离的点的椭偏仪165。如图4所示,当基板180在基板支撑件150上旋转时,针对以固定距离围绕中心轴线148的圆形路径生成椭偏仪165的测量。
60.再次参看图5,在一些实施方式中,机器人叶片202(或能够将基板180移入或移出腔室100的其他部件)用作运输机构,用于使用椭偏仪165来产生基板180的径向/弦向扫描。本领域的技术人员将认识到,这种测量类型不限于椭偏仪165,且可以使用其他传感器(例如,反射计)来产生晶片的弦向扫描。在一些实施方式中,通过沿着路径207将基板180移入和/或移出腔室100来执行基板180的径向/弦向扫描205。在将基板180移入和/或移出腔室100期间,在一些实施方式中,连续地或在产生数据弦的多个点处记录椭偏仪165的测量。在图5中,将基板180的径向/弦向扫描205示出为不同测量点209的线性分组,其中区域168被主动测量,图示为实心点。在一些实施方式中,将基板180移入腔室100超过使基板在基板支撑件150上居中的距离,以允许测量沿着径向/弦向扫描205的所有点。
61.在图5中示出的实施方式将径向/弦向扫描205图示为几何弦。几何弦是在圆上具有端点的直线段。在本公开内容中,弦是在沿着路径相对于中心轴线148的距离变化的路径
中延伸的任何测量或一系列测量。如在本公开内容和所附权利要求中所使用,弦可以在基板的领域内开始和/或结束,并且不限于在基板的边缘处开始和/或结束。
62.图4示出了围绕并相对于中心轴线148具有均匀半径的一系列同心测量。图5的径向/弦向扫描205是线性路径,其中每个测量点209与中心轴线148的距离不同。
63.在一些实施方式中,传感器140与基板支撑件150的旋转同步。例如,一些实施方式的数据编码器与移动基板180的光学测量同步。在一些实施方式中,由于当机器人叶片202缩回时基板180的相对旋转,基板180移入和/或移出腔室100产生具有非线性路径的径向/弦向扫描205。图6a至图6d示出了在部分测量期间基板180旋转使得径向/弦向扫描205遵循弯曲路径的过程。中心轴线148和测量区域168在整个图6a至图6d中保持在腔室100内的固定位置中。在图6a中,机器人202延伸到腔室100中第一距离并测量区域168。在图6b中,机器人202已经线性缩回,使得形成了测量点209的线。当相应测量点209在测量区域168处时,记录这些测量点209中的每一者。图6b图示了总共五个测量点209,包括测量区域168处的点。图6c图示了机械臂在弯管208处开始弯曲以在腔室100的卸载期间维持基板180的线性路径。弯曲弯管208导致基板180相对于中心轴线148和测量区域168旋转,使得在测量区域168处取得的测量点不与图6b中的测量点209共线。图6d图示了在弯管208处进一步弯曲以在卸载期间维持基板180的线性路径的机械臂。基板180已经相对于中心轴线148和测量区域168进一步旋转,使得径向/弦向扫描205从一端到另一端不是线性的。根据本公开内容,图6d中示出的径向/弦向扫描205被认为是弦。图6a至图6d中示出的实施方式仅示出一种可能配置,且本领域的技术人员将认识到,机器人202和基板180旋转的特定移动可以改变并且测量次序(例如,在装载与卸载期间)可以修改。
64.在一些实施方式中,基板180到传感器140的距离在围绕中心轴线148(如图4所示)或沿着测量点168处的移动路径(如图6a至图6d所示)的整个旋转期间保持基本上均匀。如以这种方式使用的,术语“基本上均匀”意味着距离相对于平均距离变化不超过5%。在一些实施方式中,从基板180到传感器140的距离在围绕中心轴线148或在测量点168处沿着移动路径的旋转期间变化。在一些实施方式中,距离传感器在腔室100内,以允许确定用于测量的路径长度。在一些实施方式中,控制器经配置为确定校正因子以考虑路径长度的改变。
65.在本说明书全文中提及“一个实施方式”、“某些实施方式”、“一个或多个实施方式”或“实施方式”意味着与所述实施方式相结合描述的具体特征、结构、材料或特性被包括在本公开内容的至少一个实施方式中。因此,在本说明书全文中的各个位置中出现的短语,诸如“在一个或多个实施方式中”、“在某些实施方式中”、“在一个实施方式中”或“在实施方式中”,不一定指代本公开内容的相同实施方式。此外,在一个或多个实施方式中,具体特征、结构、材料或特性可以任何合适的方式组合。
66.尽管本文的公开内容已经参考具体实施方式进行了描述,但是本领域的技术人员将理解,所描述的实施方式仅说明本公开内容的原理和应用。本领域的技术人员将显而易见的是,在不脱离本公开内容的精神和范围的情况下,可对本公开内容的方法和设备进行各种修改和变化。因此,本公开内容可包括在所附权利要求的范围内的修改和变化及其等效形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1