一种用于一维相控阵天线的通信卫星跟踪方法与流程
1.本发明涉及通信技术领域,具体涉及一种用于一维相控阵天线的通信卫星跟踪方法。
背景技术:
2.在通信领域,一维相控阵天线是一种折中方案,其天线面相对于天线安装基座倾斜放置,在方位上采用电机拖动天线面进行机械扫描,俯仰上通过控制天线各阵子的相位值进行电子扫描的方式,具有低轮廓、跟踪速度快等特点。
3.天线跟踪非地球同步卫星或倾斜轨道同步卫星时,由于相对于地球的位置不断变化,需要实时获取卫星理论指向角度。传统方案中天线依赖于外部卫通终端或其他上位机提供的角度信息,对数据的精确同步有较高的要求。一维相控阵天线区别于传统机械天线,其方位机扫、俯仰电扫的特点可以实现俯仰的快速扫描。但是,使用传统的圆锥扫描方式无法充分发挥一维相控阵天线的优点,因此急需一种可用于一维相控阵天线的高精度跟踪方法。
技术实现要素:
4.有鉴于此,本发明提供一种用于一维相控阵天线的通信卫星跟踪方法,该方法无需增加额外的硬件成本,可实现一维相控阵天线的高精度跟踪,具有实施简单、适用范围广的优点。
5.为了实现上述目的,本发明采用的技术方案为:
6.一种用于一维相控阵天线的通信卫星跟踪方法,包括以下步骤:
7.(1)接收北斗接收机的时间信号,实现天线系统内部时统的建立;
8.(2)通过天线控制系统内的轨道预报算法,实时计算目标卫星的地理指向角度;
9.(3)根据安装于天线基座上的航姿模块的角度、角速度信息,和天线方位轴的运动信息,计算天线指向卫星需要的转动角度,自动判断天线安装载体运动状态;结合天线安装载体运动状态、天线接收到的卫星信号强度和接收机的工作状态,动态调整天线的机械、电子扫描形式,实现对通信卫星的跟踪。
10.进一步的,所述步骤(2)的具体方式为:
11.(201)天线控制系统解析外部输入或内部存储的卫星tle两行根数,调用相应的sgp4/sdp4初始化模块;
12.(202)使用轨道预报算法,并结合天线控制系统精确的时间信息和天线所在位置的经度、纬度和高度信息,预报当前时刻卫星在地理系下的方位指向角a
d
和俯仰指向角e
d
。
13.进一步的,所述步骤(3)的具体方式为:
14.(301)通过天线基座平台上安装的航姿模块,采集其输出的航向角ψ、俯仰角θ、横滚角γ,使用下式进行天线方位转动角a
j
和俯仰转动角e
j
的计算,并将天线引导至计算角度:
[0015][0016]
e
j
=asin[sγ
·
ce
·
s(a
‑
ψ)
‑
sθ
·
cγ
·
ce
·
c(a
‑
ψ)+cθ
·
cγ
·
se]
[0017]
式中,s、c分别是sin、cos的简写,e为俯仰扫描角度幅值,a为方位扫描角度幅值;
[0018]
(302)判断接收机的工作状态,若天线无法从接收机获取正确的卫星强度信号,则天线直接保持程序引导过程,直到接收机恢复正常;若天线从接收机获取正确的卫星强度信号,则天线进行小范围信号扫描,直至卫星强度信号达到最大值p
max
,此时停止扫描,修正航姿模块输出的航向角ψ,天线保持程序引导过程;
[0019]
(303)采集并记录卫星强度信号p
i
,每间隔一段时间t或采集一定数量n后,按下式计算一次方差σ:
[0020][0021][0022]
其中,t=n
·
t,t为记录卫星强度信号p
i
的间隔时间,n和t为正实数;
[0023]
(304)根据计算得到的卫星强度信号均值和方差σ,判断天线跟踪的精度和稳定性;当同时满足时,判定天线跟踪效果良好,否则判定为天线跟踪效果不好;式中δ为天线跟踪的信号强度波动门限;
[0024]
(305)采集航姿模块内法向陀螺仪的输出ω
z
和三轴加速度计的输出f
x
、f
y
、f
z
,进行天线安装载体的动态性判断;当同时满足|ω
z
|<ω和|<ω和时判定安装载体为低动态,否则为高动态;式中ω和f分别为载体的角运动和线运动的判断门限,g为当地的重力加速度值;
[0025]
(306)根据天线跟踪效果和天线安装载体的动态性分为以下三种情况:
[0026]
(3061)天线跟踪效果良好时,天线保持程序引导过程,经过时间t
max
后,执行步骤(307)和(308),t
max
为预先设置的最大扫描间隔时间;
[0027]
(3062)天线跟踪效果不好且安装载体处于低动态时,立刻执行步骤(307)和(308);
[0028]
(3063)天线跟踪效果不好且安装载体处于高动态时,立刻执行步骤(309);
[0029]
(307)保持方位地理角度a
d
不变,记录扫描过程中的接收信号强度p
k
,扫描完成后按下式修正俯仰地理角e
d
;
[0030]
i∈[0,1,...,1/t
e
]
[0031]
其中,e为俯仰扫描角度幅值,t
e
为俯仰的扫描控制周期,k是从0到1/t
e
的整数数
组;
[0032]
(308)保持俯仰地理角度e
d
不变,记录扫描过程中的实际方位地理角度a
k
和接收信号强度p
k
,扫描完成后按下式修正方位地理角a
d
和最大信号强度p
max
:
[0033]
p
max
=p
k
,i∈[0,1,...,1/t
a
]
[0034]
式中,a为方位扫描角度幅值,t
a
为方位的扫描控制周期;
[0035]
然后,重新执行步骤(303),开始下一控制循环;
[0036]
(309)使用天线主面圆锥扫描方法在当前波束中心附近扫描,同时记录接收信号强度p
k
;扫描完成后,按下式修改指向角度和最大信号强度,修正方位地理角a
d
、俯仰地理角e
d
和最大信号强度p
max
:
[0037][0038]
p
max
=p
k
,i∈[0,1,...,1/t
a
]
[0039]
然后,重新执行步骤(303),开始下一控制循环。
[0040]
采用上述技术方案的有益效果在于:
[0041]
a)本发明在天线控制系统中集成卫星轨道预报算法,不依赖终端或其他上位机的实时指向数据,可以实现高、中、低地球轨道卫星的跟踪。
[0042]
b)本发明自主判断天线安装载体运动状态和接收机的工作状态,动态调整天线的机械、电子扫描形式,缓解了天线跟踪精度与运动部分机械磨损的矛盾关系,并提高了天线跟踪系统的可靠性。
附图说明
[0043]
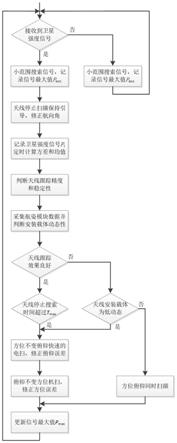
图1是本发明实施例中的流程图。
具体实施方式
[0044]
下面结合附图和具体实施方式对本发明技术方案做进一步的详细说明。
[0045]
一种用于一维相控阵天线的通信卫星跟踪方法,其包括以下步骤:
[0046]
(1)接收北斗接收机的时间信号,实现天线系统内部时统的建立;
[0047]
(2)天线控制系统内集成轨道预报算法,实时计算目标卫星的地理指向角度;
[0048]
(3)根据安装于天线基座上的航姿模块的角度、角速度信息,和天线方位轴的运动信息,计算天线指向卫星需要的转动角度,自动判断天线安装载体运动状态;结合天线安装载体运动状态、天线接收到的卫星信号强度和接收机的工作状态,动态调整天线的机械、电子扫描形式。
[0049]
其中,所述步骤(1)的具体方式为:
[0050]
(101)天线控制系统接收北斗接收机的授时信息,在天线系统内部建立精度为1秒以内的粗时间系统;
[0051]
(102)天线控制系统使用硬件中断模式接收北斗接收机的秒脉冲信号,收到秒脉冲信号后更新系统的粗时间系统,记录连续两次秒脉冲信号间隔内的系统时钟计数n
i
,使
用滑动平均确定1秒的系统时钟数n=(n
i
+n
i
‑1+
…
+n
i
‑
m+1
)/m,建立不低于毫秒级的时间基准,m一般不大于10。
[0052]
所述步骤(2)中的具体方式为:
[0053]
(201)天线控制系统解析外部输入或内部存储的卫星tle两行根数,调用相应的sgp4/sdp4初始化模块;
[0054]
(202)使用轨道预报算法结合天线控制系统精确的时间信息和天线所在位置的经度、纬度和高度信息,预报当前时刻卫星在地理系下的方位指向角a
d
和俯仰指向角e
d
;
[0055]
所述步骤(3)的具体方式为:
[0056]
(301)天线基座平台上安装航姿模块,采集其输出的航向角ψ、俯仰角θ、横滚角γ,使用下式进行天线方位转动角a
j
和俯仰转动角e
j
的计算,并将天线引导至计算角度,其中s、c分别是sin、cos的简写:
[0057][0058]
e
j
=asin[sγ
·
ce
·
s(a
‑
ψ)
‑
sθ
·
cγ
·
ce
·
c(a
‑
ψ)+cθ
·
cγ
·
se]
[0059]
(302)判断接收机的工作状态,若天线无法从接收机获取正确的卫星强度信号,则天线直接保持程序引导过程,直到接收机恢复正常;若天线从接收机获取正确的卫星强度信号,则天线进行小范围信号扫描,直至卫星强度信号达到最大值p
max
,此时停止扫描,修正航姿模块输出的航向角ψ,天线保持程序引导过程;
[0060]
(303)采集并记录卫星强度信号p
i
,每间隔一段时间t或采集一定数量n后,按下式计算一次方差σ,其中t=n
·
t,t为记录卫星强度信号p
i
的间隔时间,可以与天线的控制周期不同,n和t为正实数,结合具体情况选取;
[0061][0062][0063]
(304)根据计算得到的卫星强度信号均值和方差σ,判断天线跟踪的精度和稳定性。当同时满足σ<δ和时,判定天线跟踪效果良好,否则判定为天线跟踪效果不好。式中δ为天线跟踪的信号强度波动门限;
[0064]
(305)采集航姿模块内法向陀螺仪的输出ω
z
和三轴加速度计的输出f
x
、f
y
、f
z
,进行天线安装载体的动态性判断。当同时满足|ω
z
|<ω和|<ω和时判定安装载体为低动态,否则为高动态。式中ω和f分别为载体的角运动和线运动的判断门限,g为当地的重力加速度常值。此处安装载体不限于车、船、飞机等运动载体,还可以是地面等静止物体;
[0065]
(306)根据天线跟踪效果和天线安装载体的动态性分为以下三种情况:
[0066]
(3061)天线跟踪效果良好时,天线保持程序引导过程,经过时间t
max
后,执行步骤(307)和(308),t
max
为预先设置的最大扫描间隔时间;
[0067]
(3062)天线跟踪效果不好且安装载体处于低动态时,立刻执行步骤(307)和(308);
[0068]
(3063)天线跟踪效果不好且安装载体处于高动态时,立刻执行步骤(309);
[0069]
(307)保持方位地理角度a
d
不变,俯仰地理角度e
d
上叠加一个正旋扫描曲线式中e为俯仰扫描角度幅值,一般小于1/6半功率波束宽度,t
e
为俯仰的扫描控制周期,k是从0到1/t
e
的整数数组。由于一维相控阵天线俯仰采用电扫形式,t
e
可以很小,其主要限制是接收机的信号处理能力。记录扫描过程中的接收信号强度p
k
,扫描完成后按下式修正俯仰地理角e
d
;
[0070]
i∈[0,1,...,1/t
e
]
[0071]
(308)保持俯仰地理角度e
d
不变,方位地理角度a
d
上叠加一个正旋扫描曲线式中a为方位扫描角度幅值,一般小于1/6半功率波束宽度,t
a
为方位的扫描控制周期,k是从0到1/t
e
的整数数组。由于一维相控阵天线方位采用机械扫描形式,t
a
>>t
e
,一般设为天线的电机控制周期。记录扫描过程中的实际方位地理角度a
k
和接收信号强度p
k
,扫描完成后按下式修正方位地理角a
d
和最大信号强度p
max
,重新执行步骤(303),开始下一控制循环;
[0072]
p
max
=p
k
,i∈[0,1,...,1/t
a
]
[0073]
(309)在方位地理角度a
d
上叠加一个正旋扫描曲线同时在俯仰地理角度e
d
上叠加一个正旋扫描曲线使用双轴机械天线上常用的天线主面圆锥扫描在当前波束中心附近扫描,同时记录接收信号强度p
k
。扫描完成后按下式修改指向角度和最大信号强度,修正方位地理角a
d
、俯仰地理角e
d
和最大信号强度p
max
,重新执行步骤(303),开始下一控制循环。
[0074][0075]
p
max
=p
k
,i∈[0,1,...,1/t
a
]
[0076]
该方法通过接收北斗接收机的时间信号,实现天线系统内部时统的建立;天线控制系统内集成轨道预报算法,实时计算目标卫星的地理指向角度;根据安装于天线基座上的航姿模块的角度、角速度信息,和天线方位轴的运动信息,计算天线指向卫星需要的转动角度,自动判断天线安装载体运动状态;结合天线安装载体运动状态、天线接收到的卫星信号强度和接收机的工作状态,动态调整天线的机械、电子扫描形式,缓解了天线跟踪精度与运动部分机械磨损的矛盾关系,并提高了天线跟踪系统的可靠性。
[0077]
以下为一个更具体的例子:
[0078]
如图1所示,一种用于一维相控阵天线的通信卫星跟踪方法,其包括以下步骤:
[0079]
(1)天线控制系统接收北斗接收机的授时信息(不限于zda语句),在天线系统内部建立精度为1秒以内的粗时间系统。
[0080]
(2)天线控制系统使用硬件中断模式接收北斗接收机的秒脉冲信号,收到秒脉冲信号后更新系统的粗时间系统。
[0081]
(3)记录连续两次秒脉冲信号间隔内的系统时钟计数n
i
,使用滑动平均确定1秒的系统时钟数n=(n
i
+n
i
‑1+
…
+n
i
‑
m+1
)/m,建立不低于毫秒级的时间基准,本例中m=10。
[0082]
(4)天线控制系统解析外部输入或内部存储的卫星tle两行根数,调用相应的sgp4/sdp4初始化模块;
[0083]
(5)使用轨道预报算法结合天线控制系统精确的时间信息和天线所在位置的经度、纬度和高度信息,预报当前时刻卫星在地理系下的方位指向角a
d
和俯仰指向角e
d
;
[0084]
(6)附图1中天线基座平台上安装航姿模块,安装时保证航姿模块与天线的坐标系基本对齐,采集其输出的航向角ψ、俯仰角θ、横滚角γ,计算天线方位转动角a
j
和俯仰转动角e
j
,并将天线引导至计算角度;
[0085]
(7)天线控制循环中定时判断接收机的工作状态,若天线无法从接收机获取正确的卫星强度信号,则天线直接保持程序引导过程,直到接收机恢复正常;若天线从接收机获取正确的卫星强度信号,则天线进行小范围信号扫描,直至卫星强度信号达到最大值p
max
,此时停止扫描,修正航姿模块输出的航向角ψ,天线保持程序引导过程;
[0086]
(8)采集并记录卫星强度信号p
i
,每间隔t或采集一定数量n后,计算一次方差σ,其中t=n
·
t,t为记录卫星强度信号p
i
的间隔时间。本例中取t=0.1s,n=50;
[0087]
(9)根据计算得到的卫星强度信号均值和方差σ,判断天线跟踪的精度和稳定性。当同时满足σ<δ和时,判定天线跟踪效果良好,否则判定为天线跟踪效果不好。本例中δ=0.1,p=0.3db;
[0088]
(10)采集航姿模块内法向陀螺仪的输出ω
z
和三轴加速度计的输出f
x
、f
y
、f
z
,进行天线安装载体的动态性判断。当同时满足|ω
z
|<ω和时判定安装载体为低动态,否则为高动态。本例中ω=5
°
/s,f=0.2m/s2;
[0089]
(11)根据天线跟踪效果和天线安装载体的动态性分为以下三种情况:
[0090]
(a)天线跟踪效果良好时,天线保持程序引导过程,经过时间t
max
后,执行步骤(12)和(13),本例中t
max
=600s;
[0091]
(b)天线跟踪效果不好且安装载体处于低动态时,立刻执行步骤(12)和(13);
[0092]
(c)天线跟踪效果不好且安装载体处于高动态时,立刻执行步骤(14);
[0093]
(12)保持方位地理角度a
d
不变,俯仰地理角度e
d
上叠加一个正旋扫描曲线本例中e=0.3
°
,t
e
=2ms。记录扫描过程中的接收信号强度p
k
,扫描完成后修正俯仰地理角e
d
;
[0094]
(13)保持俯仰地理角度e
d
不变,方位地理角度a
d
上叠加一个正旋扫描曲线
本例中a=0.3
°
,t
a
=10ms。记录扫描过程中的实际方位地理角度a
k
和接收信号强度p
k
,扫描完成后修正方位地理角a
d
和最大信号强度p
max
,重新执行步骤(8),开始下一控制循环;
[0095]
(14)在方位地理角度a
d
上叠加一个正旋扫描曲线同时在俯仰地理角度e
d
上叠加一个正旋扫描曲线使用双轴机械天线上常用的天线主面圆锥扫描在当前波束中心附近扫描,同时记录接收信号强度p
k
。扫描完成后修改指向角度和最大信号强度,修正方位地理角a
d
、俯仰地理角e
d
和最大信号强度p
max
,重新执行步骤(8),开始下一控制循环。
[0096]
总之,本发明无需增加额外的硬件成本,通过软件算法即可实现一维相控阵天线的高精度跟踪,具有实施简单、适用范围广的优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1