凹口检测方法与流程
1.本发明涉及对示出晶片的晶体取向的凹口进行检测的凹口检测方法。
背景技术:
2.在器件芯片的制造工序中,使用在由呈格子状排列的多条间隔道(分割预定线)划分的多个区域内分别形成有器件的晶片。通过将该晶片沿着间隔道进行分割,能够得到分别具有器件的多个器件芯片。器件芯片被组装于移动电话、个人计算机等各种电子设备中。
3.在晶片的分割中,例如使用切削装置。切削装置使环状的切削刀具旋转而切入至被加工物,由此对被加工物进行切削。另一方面,有时也通过激光加工对晶片进行分割。在晶片的激光加工中,使用具有对被加工物照射激光束的激光照射单元的激光加工装置。
4.另外,近年来,随着电子设备的小型化,要求器件芯片薄型化。因此,有时在晶片的分割前,实施使晶片薄化的加工。在晶片的薄化中,使用磨削装置等,磨削装置利用具有多个磨削磨具的磨削磨轮对被加工物进行磨削。将磨削后的晶片沿着间隔道进行分割,由此制造薄型的器件芯片。
5.另外,在硅晶片等晶体性的晶片上形成示出晶片的晶体取向的被称为凹口的切口部。通过有意地切掉晶片的外周部的一部分而形成凹口。并且,在利用上述那样的各种加工装置对晶片进行加工时,对晶片的凹口进行检测,根据凹口的位置而调节晶片的朝向。由此,能够在以规定的朝向配置了晶片的状态下实施加工。
6.例如在专利文献1中公开了具有进行晶片的对位的对位单元的磨削装置。利用照相机对晶片进行拍摄而对形成于晶片的外周部的凹口进行检测,该对位单元根据凹口的位置而对晶片的中心位置和朝向进行调整。
7.专利文献1:日本特开2011-40637号公报
8.在利用加工装置对晶体性的晶片进行加工时,根据加工的内容,有时晶片的加工特性根据晶片的晶体取向而不同。因此,加工装置对晶片的凹口进行检测,在根据凹口的位置而以规定的朝向配置了晶片的状态下对晶片进行加工。
9.但是,有时在晶片的外周部形成有除凹口以外的缺损。例如当对晶片实施切削加工、磨削加工等机械加工时,有时由于加工工具与晶片接触而在晶片的外周部产生缺损,意外地形成类似凹口的切口部。在该情况下,在之后的工序中对晶片的凹口进行检测时,有时难以判别存在于晶片的外周部的切口部是凹口还是由于加工而偶然产生的缺损,会错误地将由于加工而产生的缺损判定为凹口。
10.当错误地将意外地形成于晶片的外周部的缺损判定为凹口时,加工装置在该缺损为凹口的前提下进行晶片的对位,对晶片实施加工。其结果是,会在以错误的朝向配置了晶片的状态下实施加工,有可能在晶片上产生加工不良。
技术实现要素:
11.本发明是鉴于该问题而完成的,其目的在于提供凹口检测方法,能够正确地检测
晶片的凹口。
12.根据本发明的一个方式,提供凹口检测方法,对形成于圆盘状的晶片的外周部且示出该晶片的晶体取向的凹口进行检测,其中,该凹口检测方法包含如下的工序:载置工序,将该晶片载置在旋转工作台上,并将该晶片的外周部的一部分定位于照相机的拍摄区域内;拍摄工序,一边使该旋转工作台旋转一边利用该照相机多次拍摄该晶片,由此获取该晶片的外周部的图像;轮廓数据获取工序,根据该图像而获取轮廓数据,该轮廓数据包含该晶片的轮廓的坐标;假想圆计算工序,根据该晶片的轮廓的坐标而计算近似于该晶片的轮廓的假想圆;异形状区域判定工序,根据该假想圆与该晶片的轮廓在该晶片的径向上的距离,对是否在该晶片的外周部存在异形状区域进行判定;以及第1凹口判定工序,根据该假想圆与该异形状区域的前端在该晶片的径向上的距离,对该异形状区域是否是凹口进行判定。
13.另外,优选该凹口检测方法还包含如下的工序:尖锐程度计算工序,计算该异形状区域的尖锐程度;以及第2凹口判定工序,根据该异形状区域的尖锐程度,对该异形状区域是否是凹口进行判定。
14.另外,优选该凹口检测方法还包含如下的工序:分割工序,通过沿着该晶片的径向将该异形状区域分成两部分的直线,将该图像分割成第1图像和第2图像;第1类似度计算工序,计算对应于该第1图像与翻转图像的类似度的第1类似度,该翻转图像是通过使该第2图像以该直线为轴进行翻转而得到的;第2类似度计算工序,计算对应于该第1图像与该第2图像的类似度的第2类似度;第3凹口判定工序,根据该第1类似度,对该异形状区域是否是凹口进行判定;以及第4凹口判定工序,根据该第2类似度,对该异形状区域是否是凹口进行判定。
15.在本发明的一个方式的凹口检测方法中,根据形成于晶片的外周部的异形状区域的尺寸或形状,对异形状区域是否是凹口进行判定。由此,即使在晶片的外周部形成有凹口以外的切口部的情况下,也不容易将该切口部错误地判定为凹口,能够正确地检测凹口。
附图说明
16.图1是示出晶片的立体图。
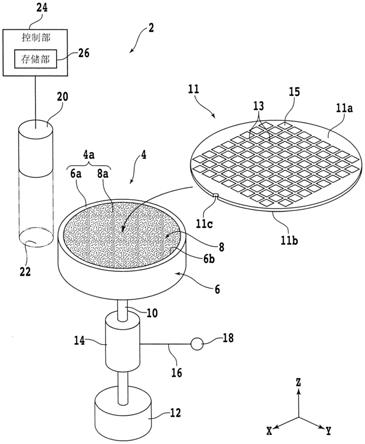
17.图2是示出凹口检测装置的立体图。
18.图3是示出凹口检测装置的动作的流程图。
19.图4的(a)是示出表现了不存在凹口的区域的第1图像的图像图,图4的(b)是示出表现了存在凹口的区域的第2图像的图像图,图4的(c)是示出表现了存在半圆状的缺损的区域的第3图像的图像图,图4的(d)是示出表现了存在扇形状的缺损的区域的第4图像的图像图,图4的(e)是示出表现了存在矩形状的缺损的区域的第5图像的图像图。
20.图5的(a)是示出显示有假想圆的第1图像的图像图,图5的(b)是示出显示有假想圆的第2图像的图像图。
21.图6的(a)是示出第2图像的异形状区域中的距离d1的图像图,图6的(b)是示出第3图像的异形状区域中的距离d2的图像图。
22.图7的(a)是示出第2图像的异形状区域的前端部的图像图,图7的(b)是示出第4图像的异形状区域的前端部的图像图。
23.图8的(a)是示出通过分割线进行了分割的第2图像的图像图,图8的(b)是示出通过分割线进行了分割的第5图像的图像图。
24.图9的(a)是示出包含翻转图像的第2图像的图像图,图9的(b)是示出包含翻转图像的第5图像的图像图。
25.标号说明
26.11:晶片;11a:正面;11b:背面;11c:凹口(切口部);13:间隔道(分割预定线);15:器件;2:凹口检测装置(凹口检测单元、凹口检测部);4:旋转工作台(保持工作台);6:框体(主体部);6a:上表面;6b:凹部(槽);8:保持部件;8a:吸引面;10:主轴;12:旋转驱动源;14:连接部;16:流路;18:吸引源;20:照相机(拍摄单元);22:拍摄区域;24:控制部(控制单元、控制装置);26:存储部(存储器);30a~30e:图像;32:存在区域(明区域);34:不存在区域(暗区域);36:轮廓;38a~38d:异形状区域;38a1、38a2、38a2′
:异形状区域;38d1、38d2、38d2′
:异形状区域;40a~40d:轮廓;42:假想圆;44a、44b:前端部;46a、46b:分割线;48a、48b:第1图像;48aa、48ba:区域;50a、50b:第2图像;50aa、50ba:区域;50a
′
、50b
′
:翻转图像;50aa
′
、50ba
′
:区域。
具体实施方式
27.以下,参照附图对本发明的一个方式的实施方式进行说明。首先,对通过本实施方式的凹口检测方法检测凹口的晶片的结构例进行说明。图1是示出晶片11的立体图。
28.例如晶片11是由硅等半导体形成且形成为圆盘状的晶体性的晶片,其具有相互大致平行的正面11a和背面11b。晶片11由按照相互交叉的方式呈格子状排列的多条间隔道(分割预定线)13划分成多个矩形状的区域。另外,在晶片11的正面11a侧的由间隔道13划分的多个区域内分别形成有ic(integrated circuit,集成电路)、lsi(large scale integration,大规模集成)、led(light emitting diode,发光二极管)、mems(micro electro mechanical systems,微机电系统)等器件15。
29.在晶片11的外周部设置有示出晶片11的晶体取向的凹口(切口部)11c。凹口11c是通过从晶片11的外周缘朝向晶片11的中心侧切掉晶片11的外周部的一部分而形成的。例如凹口11c形成为俯视半圆状。
30.凹口11c与晶片11的晶体取向对应地形成于规定的位置。因此,通过确认凹口11c的位置,能够把握晶片11的晶体取向。
31.另外,对于晶片11的材质、形状、构造、大小等没有限制。例如晶片11可以是由硅以外的半导体(gaas、inp、gan、sic等)、蓝宝石等形成的圆盘状的晶片。另外,对于器件15的种类、数量、形状、构造、大小、配置等也没有限制。
32.对晶片11实施各种加工。例如将晶片11沿着间隔道13进行分割,由此制造分别具有器件15的多个器件芯片。另外,在晶片11的分割前使晶片11薄化,由此得到薄型化的器件芯片。
33.在晶片11的分割中,例如使用切削装置或激光加工装置。切削装置具有对晶片11进行保持的卡盘工作台以及安装有环状的切削刀具的切削单元。使切削刀具旋转而切入至晶片11,由此对晶片11进行切削、分割。另外,激光加工装置具有对晶片11进行保持的卡盘工作台以及对晶片11照射激光束的激光照射单元。从激光照射单元对晶片11照射激光束,
由此对晶片11实施激光加工。
34.在晶片11的薄化中,例如使用磨削装置。磨削装置具有对晶片11进行保持的卡盘工作台以及安装有包含多个磨削磨具的环状的磨削磨轮的磨削单元。一边使磨削磨轮旋转一边使磨削磨具与晶片11接触,由此对晶片11进行磨削、薄化。
35.另外,在晶片11的加工后,有时实施加工完成的晶片11的检查。例如通过对晶片11的加工后的区域(被加工区域)进行观察的检查装置来确认残留于晶片11的加工痕(凹口、损伤等)的状态。
36.在晶片11的加工或检查时,有时需要以规定的朝向配置晶片11。因此,在上述的各种加工装置或检查装置上内置或连结有对晶片11的凹口11c进行检测的凹口检测装置。并且,根据凹口检测装置所检测的凹口11c的位置而调节晶片11的朝向。
37.图2是示出凹口检测装置(凹口检测单元、凹口检测部)2的立体图。另外,在图2中,x轴方向(第1水平方向)与y轴方向(第2水平方向)是相互垂直的方向。另外,z轴方向(铅垂方向、上下方向、高度方向)是与x轴方向和y轴方向垂直的方向。
38.凹口检测装置2具有对晶片11进行保持的旋转工作台(保持工作台)4。旋转工作台4的上表面是与x轴方向和y轴方向大致平行的平坦面,构成对晶片11进行保持的保持面4a。
39.具体而言,旋转工作台4具有由金属、陶瓷、树脂等形成的圆柱状的框体(主体部)6。在框体6的上表面6a侧的中央部形成有圆柱状的凹部(槽)6b。并且,在凹部6b中嵌入对晶片11进行保持的圆盘状的保持部件8。保持部件8是由多孔陶瓷等多孔质材料形成的多孔质部件,在内部包含从保持部件8的上表面连通到下表面的空孔(流路)。
40.保持部件8的上表面构成对晶片11的中央部进行吸引保持的圆形的吸引面8a。另外,框体6的上表面6a和保持部件8的吸引面8a配置于大致同一平面上,构成旋转工作台4的保持面4a。
41.在旋转工作台4上连接有沿着z轴方向配置的圆筒状的主轴10。主轴10的上端侧固定于旋转工作台4的下端侧,主轴10的下端侧与旋转驱动源12连结。旋转驱动源12具有使主轴10绕与z轴方向大致平行的旋转轴旋转的电动机。通过从旋转驱动源12经由主轴10而传递的动力,旋转工作台4绕与保持面4a大致垂直的旋转轴旋转。另外,旋转工作台4的旋转轴定位于旋转工作台4的中心。
42.在主轴10的中部按照围绕主轴10的方式安装有连接部14。连接部14经由由软管、配管等构成的流路16而与喷射器等吸引源18连接。旋转工作台4的保持面4a(保持部件8的吸引面8a)经由保持部件8的空孔、形成于框体6和主轴10的内部的流路(未图示)、连接部14、流路16而与吸引源18连接。
43.在旋转工作台4的上方配置有对晶片11进行拍摄的照相机(拍摄单元)20。例如作为照相机20,使用具有接受可见光并转换成电信号的拍摄元件的可见光照相机、具有接受红外线并转换成电信号的拍摄元件的红外线照相机等。照相机20对定位于照相机20的拍摄区域22的物体进行拍摄而生成所拍摄的物体的图像。
44.构成凹口检测装置2的各构成要素(旋转驱动源12、吸引源18、照相机20等)与控制部(控制单元、控制装置)24连接。控制部24将控制信号输出至凹口检测装置2的构成要素,由此控制凹口检测装置2的运转。
45.例如控制部24由计算机构成,包含进行凹口检测装置2的运转所需的运算的运算
部(未图示)以及存储各种信息(数据、程序等)的存储部26。运算部构成为包含cpu(central processing unit,中央处理器)等处理器。另外,存储部26构成为包含构成主存储装置、辅助存储装置等的各种存储器。
46.例如凹口检测装置2内置于上述的各种加工装置或检查装置。另外,凹口检测装置2也可以相对于加工装置和检查装置独立地设置并与加工装置或检查装置连结。并且,根据通过凹口检测装置2而检测的凹口11c的位置,对加工装置所加工的晶片11的朝向、检查装置所检查的晶片11的朝向进行调节。
47.图3是示出对晶片11的凹口11c进行检测时的凹口检测装置2的动作的流程图。以下,参照图2、图3等,对本实施方式的凹口检测方法的具体例进行说明。
48.首先,实施载置工序(步骤s1),将晶片11载置在旋转工作台4上。晶片11通过搬送机构(未图示)等搬送至旋转工作台4。如图2所示,例如晶片11按照正面11a侧向上方露出而背面11b侧与保持面4a面对的方式配置在旋转工作台4上。当在该状态下对吸引面8a作用吸引源18的吸引力(负压)时,晶片11被旋转工作台4吸引保持。
49.另外,旋转工作台4的保持面4a的直径小于晶片11的直径。另外,晶片11按照晶片11的中心与旋转工作台4的中心大致一致的方式进行配置。因此,当通过旋转工作台4对晶片11进行保持时,晶片11的外周部配置于比保持面4a的外周缘靠保持面4a的半径方向外侧的位置。即,晶片11按照晶片11的外周部从保持面4a探出的方式配置。
50.另外,照相机20的位置按照照相机20的拍摄区域22定位于旋转工作台4的保持面4a的半径方向外侧的方式调节。并且,当晶片11被旋转工作台4保持时,晶片11的外周部的一部分定位于照相机20的拍摄区域22内。
51.不过,旋转工作台4的保持面4a的直径可以与晶片11的直径相同、或大于晶片11的直径。在这些情况下,能够利用旋转工作台4的保持面4a对整个晶片11进行支承。例如在对薄且容易产生挠曲的晶片11进行保持的情况下,优选利用旋转工作台4的保持面4a对整个晶片11进行支承。
52.接着,实施拍摄工序(步骤s2),一边使旋转工作台4旋转一边利用照相机20对晶片11进行拍摄,由此获取晶片11的外周部的图像。具体而言,从控制部24向旋转驱动源12输出控制信号,使旋转工作台4以规定的速度旋转。另外,从控制部24向照相机20输出控制信号,照相机20按照规定的时间间隔多次拍摄定位于拍摄区域22内的晶片11的外周部。
53.当旋转工作台4旋转时,晶片11的外周部的不同的区域依次定位于照相机20的拍摄区域22。并且,沿着晶片11的周向连续地拍摄晶片11的外周部。由此,获取将晶片11的外周部的不同的区域放大而示出的多个图像。
54.另外,照相机20对晶片11的外周部的拍摄持续至通过旋转工作台4的旋转而使晶片11旋转一周为止。另外,照相机20的拍摄间隔根据旋转工作台4的旋转速度进行设定,以便通过照相机20拍摄晶片11的整个外周部。因此,当实施拍摄工序时,获取一张以上的包含晶片11的凹口11c的图像。
55.将在拍摄工序中获取的晶片11的图像的例子示于图4的(a)~图4的(e)。图4的(a)~图4的(e)示出利用照相机20多次拍摄晶片11的外周部而获取的图像30a~30e。图像30a~30e分别包含:相当于存在晶片11的区域的存在区域(明区域)32;以及相当于不存在晶片11的区域的不存在区域(暗区域)34。不过,有时根据晶片11的拍摄条件(照明的条件、照相
机20的灵敏度等),明暗会颠倒,存在晶片11的区域成为暗区域,不存在晶片11的区域成为明区域。
56.图4的(a)是示出表现了不存在凹口11c的区域的图像30a(第1图像)的图像图。当在凹口11c未定位于照相机20的拍摄区域22(参照图2)的状态下对晶片11进行拍摄时,得到不包含与凹口11c对应的图案的图像30a。在图像30a中,通过存在区域32与不存在区域34的边界线表现了相当于晶片11的外周缘的圆弧状的轮廓36。
57.图4的(b)是示出表现了存在凹口11c的区域的图像30b(第2图像)的图像图。当在凹口11c定位于照相机20的拍摄区域22(参照图2)的状态下对晶片11进行拍摄时,得到包含相当于凹口11c的异形状区域38a的图像30b。在图像30b中,除了圆弧状的轮廓36以外,还表现了相当于凹口11c的缘的异形状区域38a的轮廓40a。
58.另外,有时在晶片11的外周部存在除凹口11c以外的切口部。例如当利用安装于切削装置的切削刀具将晶片11沿着间隔道13(参照图1)切断时,有时晶片11的外周部发生碎片化而飞散,在晶片11的外周部产生缺损。另外,当利用安装于磨削装置的磨削磨轮对晶片11进行磨削时,有时由于从磨削磨轮赋予至晶片11的压力而在薄化的晶片11的外周部产生缺损。
59.如上所述,有时在晶片11的外周部由于各种原因而意外地形成有除凹口11c以外的切口部。在这些情况下,当利用照相机20连续地拍摄晶片11的外周部时,获取包含除凹口11c以外的切口部的图像。以下,作为一例,对在晶片11的外周部不仅形成有凹口11c还形成有半圆状的缺损、扇形状的缺损和矩形状的缺损的情况进行说明。
60.图4的(c)是示出表现了存在半圆状的缺损的区域的图像30c(第3图像)的图像图。在晶片11的外周部存在半圆状的缺损的情况下,通过照相机20获取包含相当于半圆状的缺损的异形状区域38b的图像30c。并且,在图像30c中,除了圆弧状的轮廓36以外,还表现了相当于半圆状的缺损的缘的异形状区域38b的轮廓40b。
61.图4的(d)是示出表现了存在扇形状的缺损的区域的图像30d(第4图像)的图像图。在晶片11的外周部存在扇形状的缺损的情况下,通过照相机20获取包含相当于扇形状的缺损的异形状区域38c的图像30d。并且,在图像30d中,除了圆弧状的轮廓36以外,还表现了相当于扇形状的缺损的缘的异形状区域38c的轮廓40c。
62.图4的(e)是示出表现了存在矩形状的缺损的区域的图像30e(第5图像)的图像图。在晶片11的外周部存在矩形状的缺损的情况下,通过照相机20获取包含相当于矩形状的缺损的异形状区域38d的图像30e。并且,在图像30e中,除了圆弧状的轮廓36以外,还表现了相当于矩形状的缺损的缘的异形状区域38d的轮廓40d。
63.如上所述,利用照相机20多次拍摄晶片11的外周部,由此生成晶片11的外周部的图像(图像30a~30e)。并且,将通过照相机20获取的图像输入至控制部24(参照图2),存储于存储部26(存储器)。
64.另外,当在将晶片11载置在旋转工作台4(参照图2)上的时刻明确凹口11c被定位于规定的区域内的情况下,可以通过照相机20仅拍摄该区域。在该情况下,无需拍摄晶片11的整个外周部,能削减拍摄工序的实施所需的作业量和时间。
65.接着,实施轮廓数据获取工序(步骤s3),根据图像30a~30e,获取包含晶片11的轮廓的坐标的轮廓数据。
66.在轮廓数据获取工序中,通过控制部24(参照图2)对图像30a~30e分别实施边缘检测等图像处理。由此,提取图像30a~30e所包含的轮廓36、40a~40d,确定轮廓36、40a~40d的坐标。另外,轮廓36、40a~40d的坐标相当于晶片11的轮廓(外周缘)的坐标。并且,将包含晶片11的轮廓的坐标的轮廓数据输入至控制部24,存储于存储部26。
67.接着,实施假想圆计算工序(步骤s4),根据晶片11的轮廓的坐标,计算近似于晶片11的轮廓的假想圆。在假想圆计算工序中,根据在轮廓数据获取工序中提取的轮廓36的坐标,用圆近似轮廓36。另外,对于近似方法没有限制,例如通过最小二乘法导出近似于轮廓36的近似式。该近似式所表示的圆相当于晶片11的轮廓的假想圆。
68.图5的(a)是示出显示有假想圆42的图像30a的图像图,图5的(b)是示出显示有假想圆42的图像30b的图像图。当将图像30a、30b与假想圆42重叠而显示时,假想圆42沿着轮廓36显示。另外,在图5的(a)和图5的(b)中,用虚线示出假想圆42。
69.分别对图像30a~30e(参照图4的(a)~图4的(e))计算假想圆42。并且,将在假想圆计算工序中计算的假想圆(近似式)存储于控制部24(参照图2)的存储部26。
70.接着,实施异形状区域判定工序(步骤s5),对是否在晶片11的外周部存在异形状区域进行判定。另外,异形状区域相当于晶片11的外周部中的、晶片11的轮廓从假想圆42偏移一定程度以上的异形的区域。
71.在异形状区域判定工序中,读出存储于控制部24的存储部26的晶片11的轮廓的坐标(轮廓36、40a~40d的坐标、参照图4的(a)~图4的(e))以及假想圆42。并且,控制部24对晶片11的轮廓与假想圆42之间的在晶片11的径向上的距离进行计算。该距离相当于近似于晶片11的轮廓的假想圆42与晶片11的实际的轮廓的偏移量。
72.轮廓的偏移量沿着轮廓36、40a~40d依次进行计算。并且,控制部24根据所计算的偏移量,对是否在晶片11的外周部存在异形状区域进行判定。
73.例如在控制部24的存储部26(参照图2)中存储有预先设定的偏移量的基准值,控制部24对所计算的偏移量与基准值依次进行比较。并且,控制部24在偏移量为基准值以上的情况下(或大于基准值的情况下),判定为存在异形状区域,在偏移量小于基准值的情况下(或为基准值以下的情况下),判定为不存在异形状区域。
74.具体而言,在晶片11的外周部中的未形成凹口11c或缺损的区域(参照图4的(a))中,晶片11的轮廓与假想圆42的位置大致一致,偏移量较小。其结果是,判定为在该区域内不存在异形状区域。另一方面,在晶片11的外周部中的形成有凹口11c或缺损的区域(参照图4的(b)~图4的(e))中,晶片11的轮廓40a~40d未沿着假想圆42,偏移量较大。其结果是,判定为在该区域内存在异形状区域。
75.另外,对于有无异形状区域的具体的判定方法没有限制。例如与晶片11的轮廓的偏移量进行比较的基准值也可以自动地设定。具体而言,可以在沿着轮廓36、40a~40d依次计算轮廓的偏移量之后,将所计算的偏移量的中央值的整数倍(2倍以上)的值设定为基准值。由此,能够按照每个晶片11分别设定考虑了晶片11的轮廓形状的偏差的基准值。
76.接着,实施第1凹口判定工序(步骤s6),根据假想圆42与异形状区域的前端在晶片11的径向上的距离,对异形状区域是否是凹口11c进行判定。
77.在第1凹口判定工序中,通过控制部24(参照图2)计算假想圆42与异形状区域的前端在晶片11的径向上的距离d。具体而言,在晶片11的外周部中的、在异形状区域判定工序
中判定为异形状区域的区域(异形状区域38a~38d、参照图4的(b)~图4的(e))中分别计算距离d。另外,异形状区域的前端相当于异形状区域的缘(轮廓40a~40d)中的、存在于在晶片11的径向上最远离假想圆42的位置的地点。
78.图6的(a)是示出图像30b的异形状区域38a中的距离d(距离d1)的图像图,图6的(b)是示出图像30c的异形状区域38b中的距离d(距离d2)的图像图。异形状区域38a的前端相当于轮廓40a中的最接近晶片11的中心的地点。另外,异形状区域38b的前端相当于轮廓40b中的最接近晶片11的中心的地点。
79.并且,控制部24根据所计算的距离d,对异形状区域是否是凹口11c进行判定。具体而言,在控制部24的存储部26(参照图2)中预先存储有与凹口11c(参照图1)的深度对应的距离d的基准值。另外,凹口11c的深度相当于凹口11c的晶片11的半径方向外侧的端部与晶片11的半径方向内侧的端部的距离。
80.例如将实际能够形成于晶片11的凹口11c的深度的下限值作为基准值而存储于存储部26。并且,控制部24对所计算的距离d与基准值进行比较,由此对异形状区域是否是凹口11c进行判定。
81.具体而言,图6的(a)所示的异形状区域38a与凹口11c对应,距离d1为凹口11c的深度的下限值以上。因此,通过控制部24判定为异形状区域38a是凹口11c。另一方面,图6的(b)所示的异形状区域38b与比凹口11c小的缺损对应,距离d2小于凹口11c的深度的下限值。因此,通过控制部24判定为异形状区域38b不是凹口11c。
82.另外,凹口11c的具体的判定方法不限于上述方法。例如也可以将实际能够形成于晶片11的凹口11c的深度的范围(上限值和下限值)作为基准值而存储于存储部26。另外,凹口11c的深度的基准值也可以与上述的异形状区域判定工序同样地自动地设定。在该情况下,不需要预先设定基准值并存储于存储部26的作业。
83.如上所述,在第1凹口判定工序中,根据形成于晶片11的外周部的异形状区域的尺寸,对异形状区域是否是凹口11c进行判定。因此,能够防止将尺寸与凹口11c不同的缺损误判定为凹口11c,能正确地检测凹口11c。
84.不过,在形成于晶片11的外周部的缺损的尺寸接近凹口11c的尺寸的情况下,有时即使实施第1凹口判定工序也无法确定凹口11c。例如如图4的(d)和图4的(e)所示,在晶片11的外周部存在尺寸与凹口11c同等的异形状区域38c、38d的情况下,会将异形状区域38c、38d也判定为凹口11c,无法确定凹口11c。
85.因此,在存在多个通过第1凹口判定工序判定为是凹口11c的异形状区域的情况下,使用其他判定方法,进一步对该异形状区域是否是凹口11c进行判定。具体而言,实施如下的工序:尖锐程度计算工序(步骤s7),对异形状区域的尖锐程度进行计算;以及第2凹口判定工序(步骤s8),根据异形状区域的尖锐程度而对异形状区域是否是凹口11c进行判定。
86.具体而言,首先控制部24对通过第1凹口判定工序判定为是凹口11c的异形状区域的图像(图像30b、30d、30e)实施图像处理,将各异形状区域的尖锐程度数值化。例如控制部24对异形状区域的图像实施使用了moravec角检测法等的角检测处理,计算与异形状区域的前端部的尖锐程度对应的数值(角似然度:corner likelihood)。
87.接着,控制部24根据异形状区域的尖锐程度,对异形状区域是否是凹口11c进行判定。具体而言,在控制部24的存储部26(参照图2)预先存储角似然度的基准值。例如将实际
能够形成于晶片11的凹口11c的角似然度的上限值作为基准值而存储于存储部26。并且,控制部24对所计算的角似然度与基准值进行比较,由此对异形状区域是否是凹口11c进行判定。
88.图7的(a)是示出图像30b的异形状区域38a的前端部44a的图像图,图7的(b)是示出图像30d的异形状区域38c的前端部44b的图像图。如图7的(a)和图7的(b)所示,异形状区域38a的前端部44a不包含角,异形状区域38c的前端部44b包含角。因此,在异形状区域38a和异形状区域38c中,角似然度不同。
89.图7的(a)所示的异形状区域38a与凹口11c对应,异形状区域38a的角似然度为凹口11c的角似然度的上限值以下。因此,通过控制部24判定为异形状区域38a是凹口11c。另一方面,图7的(b)所示的异形状区域38c与比凹口11c尖锐的缺损对应,异形状区域38c的角似然度大于凹口11c的角似然度的上限值。因此,通过控制部24判定为异形状区域38c不是凹口11c。
90.另外,对于凹口11c的具体的判定方法没有限制。例如也可以将实际能够形成于晶片11的凹口11c的角似然度的范围(上限值和下限值)作为基准值而存储于存储部26。另外,角似然度的基准值也可以自动地设定。例如可以在依次计算异形状区域所包含的各区域的角似然度之后,将所计算的角似然度的中央值的整数倍(2倍以上)的值设定为角似然度的基准值。
91.如上所述,在第2凹口判定工序中,根据形成于晶片11的外周部的异形状区域的尖锐程度,对异形状区域是否是凹口11c进行判定。因此,能够防止将尖锐程度与凹口11c不同的缺损误判定为凹口11c,能正确地检测凹口11c。
92.不过,在形成于晶片11的外周部的缺损的前端部不包含角的情况下,有时即使实施第2凹口判定工序也无法确定凹口11c。例如如图4的(e)所示,异形状区域38d的前端部平坦,不包含尖锐的角。因此,容易将异形状区域38d也判定为凹口11c,难以确定凹口11c。
93.因此,在存在多个在第2凹口判定工序中判定为凹口11c的异形状区域的情况下,使用其他判定方法,进一步对该异形状区域是否是凹口11c进行判定。具体而言,实施如下的工序:类似度计算工序(步骤s9),计算通过将包含异形状区域的图像分割而得到的第1图像与第2图像的类似度;第3凹口判定工序(步骤s10),根据第1图像与第2图像的翻转图像的类似度,对异形状区域是否是凹口11c进行判定;以及第4凹口判定工序(步骤s11),根据第1图像与第2图像的类似度,对异形状区域是否是凹口11c进行判定。
94.在类似度计算工序中,首先通过沿着晶片11的径向将异形状区域分成两部分的直线,将包含异形状区域的图像分割成第1图像和第2图像(分割工序)。以下,对将图像30b、30e分别分割成第1图像和第2图像的情况进行详细叙述。
95.图8的(a)是示出通过分割线46a分割成第1图像48a和第2图像50a的图像30b的图像图。图像30b被沿着晶片11的径向将异形状区域38a二等分的直线即分割线46a分割成第1图像48a和第2图像50a。其结果是,在第1图像48a中示出包含相当于被分割的异形状区域38a的一部分的异形状区域38a1的区域48aa。另外,在第2图像50a中示出包含相当于被分割的异形状区域38a的一部分的异形状区域38a2的区域50aa。
96.图8的(b)是示出通过分割线46b分割成第1图像48b和第2图像50b的图像30e的图像图。图像30e被沿着晶片11的径向将异形状区域38d二等分的直线即分割线46b分割成第1
图像48b和第2图像50b。其结果是,在第1图像48b中示出包含相当于被分割的异形状区域38d的一部分的异形状区域38d1的区域48ba。另外,在第2图像50b中示出包含相当于被分割的异形状区域38d的一部分的异形状区域38d2的区域50ba。
97.另外,关于将异形状区域分成两部分的直线(分割线)的确定方法没有限制。例如将沿着晶片11的径向将假想圆42(参照图5的(b)等)与异形状区域的缘连结的多条直线(候补线)中的一条候补线选择为分割线。
98.具体而言,将多条候补线中的长度最大的候补线或长度的移动平均值最大的候补线设定为分割线。另外,可以将多条候补线中的通过异形状区域的两端(异形状区域的一端与假想圆42的连结点以及异形状区域的另一端与假想圆42的连结点)的中点的候补线设定为分割线。
99.另外,分割线也可以根据候补线的位置和长度而进行设定。具体而言,首先将假想圆42中的与异形状区域相邻的区域所包含的多个点设定为基准点。接着,对各基准点计算表示基准点的位置的位置坐标x与通过该基准点的候补线的长度l的积xl。并且,用各基准点的值xl的总和除以多个候补线的长度l的总和。由此,计算利用候补线的长度进行了加权的基准点的位置坐标x
′
。并且,将通过由位置坐标x
′
所确定的基准点的候补线设定为分割线。
100.另外,基准点的位置也可以代替位置坐标x而利用以假想圆42为基准的角度θ来表示。在该情况下,计算利用候补线的长度进行了加权的基准点的角度θ
′
。并且,将通过由角度θ
′
所确定的基准点的候补线设定为分割线。
101.接着,使图像30b的第2图像50a和图像30e的第2图像50b翻转。具体而言,控制部24对图像30b实施图像处理,以分割线46a为轴而使第2图像50a翻转。同样地,控制部24对图像30e实施图像处理,以分割线46b为轴而使第2图像50b翻转。由此,生成第2图像50a的翻转图像和第2图像50b的翻转图像。
102.图9的(a)是示出包含第1图像48a和第2图像50a的翻转图像50a
′
的图像30b的图像图,图9的(b)是示出包含第1图像48b和第2图像50b的翻转图像50b
′
的图像30e的图像图。在翻转图像50a
′
中示出区域50aa
′
,区域50aa
′
包含与翻转前的异形状区域38a2(参照图8的(a))对应的异形状区域38a2′
。另外,在翻转图像50b
′
中示出区域50ba
′
,区域50ba
′
包含与翻转前的异形状区域38d2(参照图8的(b))对应的异形状区域38d2′
。
103.接着,控制部24计算对应于第1图像与第2图像的翻转图像的类似度的第1类似度(第1类似度计算工序)。具体而言,控制部24首先通过图像处理对图像30b的第1图像48a和翻转图像50a
′
进行比较,将两者的类似度数值化。
104.另外,对于用于比较第1图像48a和翻转图像50a
′
的图像处理的内容没有限制。例如第1图像48a所包含的区域48aa与翻转图像50a
′
所包含的区域50aa
′
的类似度使用模板匹配等中所利用的类似度的计算方法进行数值化。类似度的具体的计算方法可以自由地选择,例如使用ssd(sum of squared difference,平方差之和)、sad(sum of absolute difference,绝对差之和)、ncc(normalized cross correlation,归一化互相关)等。
105.同样地,控制部24通过图像处理对图像30e的第1图像48b和翻转图像50b
′
进行比较,将两者的类似度数值化。其结果是,得到表示图像30b所包含的第1图像48a与翻转图像50a
′
的类似度的数值以及表示图像30e所包含的第1图像48b与翻转图像50b
′
的类似度的数
值。表示该类似度的数值相当于第1类似度。
106.接着,控制部24计算对应于第1图像与第2图像的类似度的第2类似度(第2类似度计算工序)。具体而言,控制部24通过图像处理对图像30b的第1图像48a与第2图像50a(参照图8的(a))进行比较,将两者的类似度数值化。同样地,控制部24通过图像处理对图像30e的第1图像48b与第2图像50b(参照图8的(b))进行比较,将两者的类似度数值化。
107.其结果是,得到表示图像30b所包含的第1图像48a与第2图像50a的类似度的数值以及表示图像30e所包含的第1图像48b与第2图像50b的类似度的数值。表示该类似度的数值相当于第2类似度。
108.另外,对于第1图像与第2图像的比较方法没有限制,例如可通过与第1类似度计算工序同样的方法计算类似度。具体而言,在图像30b中,将第1图像48a所包含的区域48aa与第2图像50a所包含的区域50aa的类似度数值化。另外,在图像30d中,将第1图像48b所包含的区域48ba与第2图像50b所包含的区域50ba的类似度数值化。
109.接着,控制部24根据第1类似度,对异形状区域是否是凹口11c进行判定(第3凹口判定工序)。例如在控制部24的存储部26存储有预先设定的第1类似度的基准值,控制部24对所计算的第1类似度与基准值进行比较。并且,控制部24根据第1类似度与基准值的大小关系,对异形状区域是否是凹口11c进行判别。具体而言,在第1图像与翻转图像的类似度为基准值以上的情况下(或高于基准值的情况下),控制部24判别为异形状区域是凹口11c。
110.如图9的(a)所示,第1图像48a包含示出圆弧状的图案(异形状区域38a1)的区域48aa,翻转图像50a
′
包含示出圆弧状的图案(异形状区域38a2′
)的区域50aa
′
。另外,两图案的大小大致一致,是类似的。因此,在第1图像48b和翻转图像50b
′
中包含彼此类似的图案,第1图像48b与翻转图像50b
′
的类似度较高。
111.另外,如图9的(b)所示,第1图像48b包含示出矩形状的图案(异形状区域38d1)的区域48ba,翻转图像50b
′
包含示出矩形状的图案(异形状区域38d2′
)的区域50ba
′
。另外,两图案的宽度和高度大致一致,是类似的。因此,在第1图像48b和翻转图像50b
′
中包含彼此类似的图案,第1图像48b和翻转图像50b
′
的类似度较高。
112.因此,第1图像48a与翻转图像50a
′
的类似度以及第1图像48b与翻转图像50b
′
的类似度均大于基准值。其结果是,图像30b所包含的异形状区域38a和图像30e所包含的不同的异形状区域38d均被判定为凹口11c。
113.另外,控制部24根据第2类似度,对异形状区域是否是凹口11c进行判定(第4凹口判定工序)。例如在控制部24的存储部26存储有预先设定的第2类似度的基准值,控制部24对所计算的第2类似度与基准值进行比较。并且,控制部24根据第2类似度与基准值的大小关系,对异形状区域是否是凹口11c进行判别。具体而言,在第1图像与第2图像的类似度为基准值以下(或小于基准值)的情况下,控制部24判别为异形状区域是凹口11c。
114.如图8的(a)所示,第1图像48a包含示出圆弧状的图案(异形状区域38a1)的区域48aa,第2图像50a包含示出圆弧状的图案(异形状区域38a2)的区域50aa。但是,两图案的角度相差约90
°
,不类似。因此,在第1图像48a和第2图像50a中不包含彼此类似的图案,第1图像48a与第2图像50a的类似度较低。
115.另一方面,如图8的(b)所示,第1图像48b包含示出矩形状的图案(异形状区域38d1)的区域48ba,第2图像50b包含示出矩形状的图案(异形状区域38d2)的区域50ba。并且,
两图案的宽度和高度大致一致,是类似的。因此,在第1图像48b和第2图像50b中包含彼此类似的图案,第1图像48b与第2图像50b的类似度较高。
116.因此,第1图像48a与第2图像50a的类似度低于基准值。其结果是,判定为图像30b所包含的异形状区域38a是凹口11c。另一方面,第1图像48b与第2图像50b的类似度高于基准值。其结果是,判定为图像30e所包含的异形状区域38d不是凹口11c。
117.如上所述,通过第3凹口判定工序将左右非对称的异形状区域从凹口11c的候补中排除,并且通过第4凹口判定工序将矩形状的异形状区域从凹口11c的候补中排除。例如在本实施方式中,图像30e所包含的异形状区域38d是左右对称的,因此虽然在第3凹口判定工序中未从凹口11c的候补中排除,但在接下来的第4凹口判定工序中从凹口11c的候补中排除。其结果是,判明图像30b所包含的异形状区域38a(参照图4的(b))表示凹口11c,图像30c~30e所包含的异形状区域38b~38d(参照图4的(c)~图4的(e))表示凹口11c以外的切口部。
118.如上所述,在本实施方式的凹口检测方法中,根据形成于晶片11的外周部的异形状区域的尺寸或形状,对异形状区域是否是凹口11c进行判定。由此,即使在晶片11的外周部形成有凹口11c以外的切口部的情况下,也不容易将该切口部错误地判定为凹口11c,能够正确地检测凹口11c。
119.上述的凹口检测方法通过控制部24(参照图2)自动地实施。具体而言,在控制部24的存储部26存储有记述用于检测凹口11c的一系列的动作(参照图3的步骤s2~s11)的程序。并且,当将晶片11载置在旋转工作台4上时(步骤s1),控制部24从存储部26读出程序并执行,对凹口11c进行检测。由此,简易且迅速地实施凹口11c的检测。
120.另外,在本实施方式中,对依次实施四种凹口检测工序(第1~第4凹口检测工序)的例子进行了说明,但凹口检测工序的数量可以适当地变更。具体而言,也可以仅实施第1~第4凹口检测工序中的任意的一种、两种或三种凹口检测工序。另外,在实施多种凹口检测工序的情况下,凹口检测工序的顺序可以自由地设定。
121.除此之外,上述实施方式的构造、方法等只要不脱离本发明的目的的范围,则可以适当变更并实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1