基于伺服电机的多种端子精准插针装置的制作方法
1.本发明涉及接插件模具插针设备领域,尤其涉及一种基于伺服电机的多种端子精准插针装置。
背景技术:
2.接插件作为电气设备中常用的一种元件,主要用于连接两个有源器件的器件,传输电流或者信号,而接插件在生产过程中最复杂的生产步骤是通过插针装置对接插件模具进行插针加工,而现有的插针方式是通过凸轮插针机来实现插针的,这种纯机械的凸轮结构,每个凸轮的插针的运动曲率是固定的,因此,每个凸轮插针机通常只是针对一类产品,也就是说,每个凸轮只能完成其所对应的那类连接器的插针。而在实际生产中,连接器的种类很多,因此,如果需要生产不同种类的接插件就更换需要不同类型的凸轮机来完成生产。
技术实现要素:
3.本发明公开了一种基于伺服电机的多种端子精准插针装置,以解决上述背景技术中现有的凸轮插针机在生产不同种类的接插件就更换需要不同类型的凸轮机来完成生产的问题。
4.为解决上述问题,现提出以下技术方案:
5.一种基于伺服电机的多种端子精准插针装置,用于将料带中的端子插入接插件模具的端子孔中,包括箱体,还包括设置在所述箱体内的伺服插针模组、伺服端子送料模组和模具三向定位模组,所述模具三向定位模组用于接插件模具装载和定位,所述箱体的外侧壁还连接有端子放料盘,所述端子放料盘用于收纳料带,所述箱体的侧壁开设有开口,所述端子放料盘收纳的料带通过所述开口伸入所述箱体的内,并通过所述伺服端子送料模具将料带中的端子输送至所述伺服端子模插入所述模具三向定位模组上的接插件模具。
6.作为优选,所述模具三向定位模组包括x-y-z三向运动平台、三组伺服电机,三组所述伺服电机分别设置在所述x-y-z三向运动平台的x轴、y轴和z轴上,用于使所述x-y-z三向运动平台可以完成三向运动。
7.作为优选,所述x-y-z三向运动平台还设置有模具载具和载具装夹装置,所述载具装夹装置设置在所述x-y-z三向运动平台上用于装夹所述模具载具,使所述模具载具随所述x-y-z三向运动平台作三向运动。
8.作为优选,所述伺服端子送料模组包括支撑架、端子流道、流道盖板、送料棘轮和伺服电机,所述支撑架与所述箱体固定连接,所述端子流道固定连接在所述支撑架的侧壁上,所述流道盖板可拆卸连接在所述端子流道的上端面,所述流道盖板的下端面设置有用于料带穿过的凹槽,所述支撑架上还设有伺服电机,所述伺服电机可拆卸连接有用于输送料带前进的送料棘轮。
9.作为优选,所述支撑架上还设有用于检测料带是否缺料的检查装置。
10.作为优选,所述伺服插针模组包括固定架、端子夹持机构和端子剪切机构,所述固
定架固定连接在所述箱体内,所述端子夹持机构用于端子的运送剪切和插入接插件模具的工作,所述端子剪切机构用于剪切所述端子夹持机构夹持的端子,所述端子夹持机构与所述端子剪切机构对向连接在所述固定架上。
11.作为优选,所述伺服端子送料模组可以设置一组或者多组,所述端子放料盘与所述伺服端子送料模组数量相同。
12.作为优选,还包括控制装置,所述控制装置与所述箱体连接,所述控制装置用于控制所述伺服插针模组、伺服端子送料模组和模具三向定位模组。
13.作为优选,所述箱体还设有由于放置或更换接插件模具的产品放置窗口,所述产品放置窗口还设有防止误操作的安全光栅,所述安全光栅与所述控制装置电连接。
14.作为优选,所述箱体的外侧壁还设有双手设备启动按钮,所述双手设备启动按钮与所述控制装置电连接。
15.有益之处:本发明公开了一种基于伺服电机的多种端子精准插针装置,用于将料带中的端子插入接插件模具的端子孔中,包括箱体和设在箱体内的伺服插针模组、伺服端子送料模组和模具三向定位模组,箱体外还设有用于收纳料带的端子收纳盘,料带从端子收纳盘延伸至箱体内,通过伺服端子送料模组将端子输送至伺服插针模组,伺服插针模组将端子夹持、剪切并插入接插件模具中,伺服插针模组具有端子时序的灵活配置,可以不改变整体结构兼容不同端子方式的端子,同时端子速度快;而模具三向定位模组可以实现x-y-z轴三向移动,从而实现接插件包含有多排端子孔、多种端子深度的情况,而且本发明可以在更换少量部件的情况下实现生产不同种类的接插件,大大减少了生产成本。
附图说明
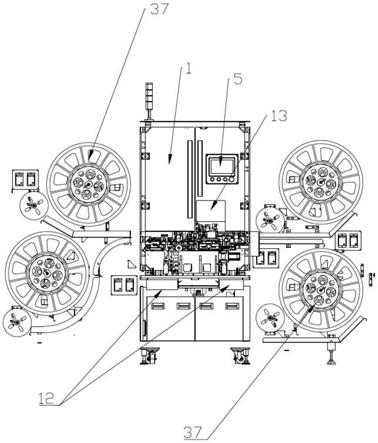
16.图1为本发明的结构图;
17.图2为本发明的箱体内部结构图;
18.图3为本发明伺服插针模组结构图;
19.图4为伺服插针模组剖视图;
20.图5为a部分局部放大图;
21.图6为本发明伺服端子送料结构图;
22.图7为本发明模具三向定位模组结构图。
23.主要元件符号说明:
24.1、箱体;11、安全光栅;12、双手设备启动按钮;13、窗口
25.2、伺服插针模组;21、固定架;22、端子夹持机构;23、端子剪切机构;24、推针装置;
26.3、伺服端子送料模组;31、支撑架;32、端子流道;33、流道盖板;34、送料棘轮;36、检查装置;37、端子放料盘;
27.4、模具三向定位模组;42、x-y-z三向运动平台;43、模具载具;44、载具装夹装置;
28.5、控制装置;6、伺服电机。
具体实施方式
29.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是
本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
30.以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.本发明为一种基于伺服电机的自动端子系统,用于将料带中的端子插入接插件模具的端子孔中,包括箱体1,还包括设置在箱体1内的伺服插针模组2、伺服端子送料模组3和模具三向定位模组4,模具三向定位模组4用于接插件模具装载和定位,通过将接插件模具装载在模具三向定位模组4,模具三向定位模组4带动接插件模具移动,使接插件模具运动到相应的位置,便于伺服插针模组2将端子插入接插件模组的端子孔内,箱体1的外侧壁还连接有端子放料盘,端子放料盘用于收纳料带,端子放置在料带中,箱体1的侧壁开设有开口,端子放料盘收纳的料带通过开口伸入箱体1的内,并通过伺服端子送料模具将料带中的端子输送至伺服端子模,伺服端子模首先夹持端子,然后将端子剪切至相应的长短,最后在将端子插入模具三向定位模组4上的接插件模具,同时模具三向定位模组4改变接插件模具的位置,从而实现多排、多深度的插入。
32.模具三向定位模组4包括x-y-z三向运动平台42、三组伺服电机6,伺服电机6与x-y-z三向运动平台42连接,三组伺服电机6分别设置在x-y-z三向运动平台42的x轴、y轴和z轴上,从而使x-y-z三向运动平台42可以完成上下、左右、前后三向的运动,并带动接插件模具运动,使伺服插针模组2可以多排、多深度的插入端子。
33.x-y-z三向运动平台42还设置有模具载具43和载具装夹装置44,载具装夹装置44设置在x-y-z三向运动平台42上用于装夹模具载具43,使模具载具43随x-y-z三向运动平台42作三向运动,同时在需要对生产的接插件的类型进行更换时,只需要更换模具载具43,然后将新的模具载具43通过载具装夹装置44夹持,然后在调整伺服电机6的程序参数就可以生产新的类别的接插件,如此只用更换少量的部件就可以完成多类别接插件的生产工作,大大减少了生产成本。
34.伺服端子送料模组3包括支撑架31、端子流道32、流道盖板33、送料棘轮34和伺服电机6,支撑架31与箱体1固定连接,端子流道32固定连接在支撑架31的侧壁上,流道盖板33可拆卸连接在端子流道32的上端面,流道盖板33的下端面设置有用于料带穿过的凹槽,同时可以使料带在穿过流道盖板33时可以将料带整直便于伺服插针模组2抓取料带中的端子时,抓取每一根端子的位置相同,支撑架31上还设有伺服电机6,伺服电机6可拆卸连接有用于输送料带前进的送料棘轮34,料带通过流道盖板33下端面设置的凹槽,通过送料棘轮34咬合料带,从而实现对料带的输送,同时送料棘轮34的齿隙与料带中的端子之间的距离相匹配,从而可以精确控制料带运送的速度,使伺服插针模组2可以平稳的抓取端子,在生产不同类别的接插件模具时,端子的型号也可能需要更换,而运送端子的料带也因此需要更换,因此是需要更换送料棘轮34和流道盖板33就可以实现多中类别型号的接插件的生产工作。
35.支撑架31上还设有用于检测料带是否缺料的检查装置36,检查装置36为红外光传感器,当料带在端子流道32中运输时,检查装置36检查料带上是否携带有端子,如果料带上缺少端子,被检查装置36检测出来后就会发出警报。
36.伺服插针模组2包括固定架21、端子夹持机构22和端子剪切机构23,固定架21固定连接在箱体1内,端子夹持机构22用于端子的运送剪切和插入接插件模具的工作,端子剪切机构23用于剪切端子夹持机构22夹持的端子,端子夹持机构22与端子剪切机构23对向连接在固定架21上,端子夹持机构22还设有四组伺服电机6,分别控制端子夹持机构22完成夹持端子、完成上下左右前后运动的工作,端子剪切机构23设有一组伺服电机6,控制端子剪切机构23完成当端子夹持机构22将端子运送至指定位置时剪切端子的工作,当伺服端子送料模组3将端子送至端子夹持机构22处时,端子夹持机构22将伺服端子送料模组3上的端子抓取,然后运送至端子剪切装置,端子剪切装置完成对端子的剪切,最后端子夹持机构22将端子插入接插件模具的端子孔中,之后重复上述动作,直至接插件制作完成。
37.更优的,伺服插针模组2还设有推针装置24,推针装置设置在端子夹持机构22和端子剪切机构23之间,与固定架21连接,推针装置24用于将端子夹持机构22夹持的已经剪切好的端子快速插入接插件模具中,大大增加生产效率。
38.伺服端子送料模组3可以设置一组或者多组,端子放料盘与伺服端子送料模组3数量相同,其伺服端子送料模组3可以设置一组、两组、三组或者四组,如果伺服端子送料模组3设置两组时,其伺服插针模组可以左右对称的设置在端子夹持机构22的两侧,一个端子放料盘中收纳一种料带,在加工需要插入多种不同型号端子的接插件时,就可以设置多组伺服端子送料模组3来运送不同型号的端子,以此可以一次工序就可以完成需要插入多种不同型号端子的接插件的加工,大大增加了加工效率,降低了加工成本。
39.还包括控制装置5,控制装置5与箱体1连接,控制装置5用于控制伺服插针模组2、伺服端子送料模组3和模具三向定位模组4,控制装置5通过控制控制伺服插针模组2、伺服端子送料模组3和模具三向定位模组4中的伺服电机6或者伺服旋转轴来完成对接插件模具的加工工作,控制装置5中设置有软件程序,在接插件模具的加工过程中,只需要对控制装置5中的软件程序中的参数进行修改,就可以完成对不同类型的接插件模具的加工,操作方便,灵活性高,大大降低了生产成本。
40.箱体1还设有由于放置或更换接插件模具的产品放置窗口,产品放置窗口还设有防止误操作的安全光栅11,安全光栅11与控制装置5电连接,当操作人员在对箱内的接插件模具进行更换时,操作人员需要将手通过箱体1上的产品放置窗口伸入到箱体1内进行更换接插件模具,而在产品放置窗口设置安全光栅11,当安全光栅11检测到操作人员未将手臂抽出产品放置窗口时,安全光栅11会向控制装置5发送禁止使用的指令,反之则向控制装置5发送允许使用的指令;箱体1的外侧壁还设有双手设备启动按钮12,双手设备启动按钮12与控制装置5电连接,双手设备启动按钮12是一种需要同时按住两个按钮时才能启动设备的开关组件,因此设置双手设备启动按钮12进一步降低了操作人员误操作的可能性,有效的降低了因误操作导致的人员伤亡和设备损坏的概率。
41.本发明公开了一种基于伺服电机6的自动端子系统,通过设置控制装置5中的软件程序的参数,来进行多种类型接插件模具的加工,在使用过程中,在端子放料盘中放置带有与所要加工的接插件模具相应的端子的料带,料带伸入箱体1内通过伺服端子送料模组3进行运送端子,操作人员首先将接插件模具通过箱体1上的产品放置窗口放置在模具载具43上,此时安全光栅11检测到产品放置窗口有异物,因此向控制装置5发送禁止使用的指令,当操作人员将手臂抽出后,安全光栅11发生允许使用的指令,操作人员双手同时按住双手
启动按钮,双手启动按钮向控制装置5发送启动指令,在控制装置5接收到启动指令后,控制装置5控制x-y-z三向运动平台42上设置的三组伺服电机6,使x-y-z三向运动平台42带动模具载具43运送到相应的加工位置,同时控制装置5还控制伺服端子送料模组3中的伺服电机6,伺服电机6控制送料棘轮34使料带可以在端子流道32上运输,料带通过端子流道32与流道盖板33之前的间隙向端子夹持机构22运送端子,当端子被送往端子流道32末端后,控制装置5控制端子夹持机构22上的四组伺服电机6和端子剪切机构23上的一组伺服电机6,使端子夹持机构22首先夹持端子流道32末端的端子,再将端子运送到指定位置,然后端子剪切机构23剪切端子,最后端子夹持机构22在将端子插入接插件模具的端子孔内,重复上述控制装置5控制端子夹持机构22和端子剪切机构23的步骤,直至接插件模具加工完成,然后控制装置5对伺服插针模组2、伺服端子送料模组3发出停止指令,对模具三向定位模组4发出复位指令,此时伺服插针模组2、伺服端子送料模组3停止运行,模具三向定位模组4回到原来的位置,操作人员通过产品放置窗口将加工完成的接插件模具拿出,换上新的接插件模具,并重复上述所以的步骤继续加工新的接插件模具。
42.有益效果:
43.1、本发明可以通过更换送料棘轮、流道盖板和模具载具就可以实现不同类型的接插件模具的加工工作,大大降低了生产成本。
44.2、本发明使用安全光栅和双手设备启动按钮双重安全方案,大大降低因为操作人员误操作而导致人员伤亡和设备损坏的可能性。
45.3、本发明使用伺服电机来做为各个模组的驱动组件并有控制装置来控制这些伺服电机,如此仅需调整控制装置中的软件程序中的参数就可以完成多类型接插件模具的加工。
46.4、本发明同时使用多组伺服电机,可以实现在一次工序中完成多种不同端子型号插入接插件模具的加工。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1