一种自动化晶圆载台及其使用方法与流程
1.本技术涉及半导体设备技术领域,尤其涉及一种自动化晶圆载台。
背景技术:
2.硅晶圆片的夹持与输送是半导体生产工艺中的一个重要环节,较大程度地影响着硅晶圆片的质量和可靠性。
3.现有技术中,主要采用接触式真空吸盘技术进行硅晶圆片的夹持与输送。即通过真空吸附将硅晶圆片下表面紧贴,然而与吸盘的直接接触易导致硅片受力不均,容易造成硅片翘曲、变形等问题,另外,存在漏气吸不紧,载台高速运动时还有飞片(产品飞出载台)安全隐患。有些产品激光加工时容易产生高温或产品微量变形,在高温较高产品易变形的情况下,吸盘高温下使用容易老化,对具有纳米级精度的芯片制造过程而言,接触式真空吸附技术更容易导致废品率的进一步增加。
技术实现要素:
4.为了解决现有技术的不足,本技术的主要目的在于提供一种自动化晶圆载台及其使用方法,提供一种吸附效果稳定、适用范围广泛、具有散热功能以及产品升降功能的载台。
5.为了达到上述目的,本技术提供了一种自动化晶圆载台,包括:
6.吸盘,吸盘中部开设有顶升滑孔;
7.基座,基座上部安装有所述吸盘,基座和所述吸盘接触面中部开设有凹槽形成安装位;
8.顶升机构,顶升机构设置于所述安装位中,所述顶升机构被配置为对硅晶圆片进行顶升,所述顶升机构包括安装板、固定板以及顶升轴,其中,
9.安装板用于将顶升机构安装于所述安装位,
10.固定板通过气缸的伸缩杆连接于安装板上方,
11.顶升轴设于所述固定板上端面,所述顶升轴升降于所述吸盘的工作面,所述顶升滑孔被配置为顶升轴进行升降时的通道。
12.优选地,所述顶升机构还包括:
13.导向孔,导向孔开设于所述固定板;
14.导向轴,所述导向轴设置于安装板,导向轴与导向孔同轴设置,导向孔被配置为导向轴的限位轨道。
15.优选地,所述安装位包括阶梯孔,所述顶升机构通过安装板连接于所述阶梯孔。
16.优选地,所述吸盘包括:
17.喷气口,开设于所述吸盘的工作面;
18.气管,气管连接于外部气源。
19.优选地,所述喷气口设置为环形,用于在所述硅晶圆片底部均匀喷射高压空气。
20.优选地,所述硅晶圆片和所述吸盘之间通过高压空气产生气旋从而形成负压区域,硅晶圆片通过气面悬空吸附于所述吸盘。
21.优选地,载台还包括:
22.驱动机,所述驱动机通过连接部连接所述基座;
23.连接部,用于连接驱动机和所述基座,连接部为环状结构,所述连接部被所述驱动机带动同轴转动。
24.优选地,载台还包括:
25.传感组件,设置于所述自动化晶圆载台侧部,所述传感组件包括感应片、光电开关,感应片沿连接部径向方向固定于连接部外侧,
26.所述光电开关与驱动机设置于同一工作台,所述驱动机转动时,所述感应片通过连接部带动同步转动,光电开关对转动的感应片进行探测;
27.所述感应部末端折弯预设角度形成接触部,接触部被配置为所述光电开关对感应片的探测目标;
28.所述光电开关设置有两个,两个光电开关间隔设置于所述感应片的旋转路径上,且感应片的接触部的运动轨迹位于光电开关的信号接收区域。
29.优选地,载台还包括:
30.限位块,通过感应片设置于连接部一侧;
31.限位柱,限位柱数量为两个,分别设置于两个光电开关的外侧,限位柱被配置为载台转动时对通过限位块和限位柱对载台转动范围进行限定。
32.一种自动化晶圆载台的使用方法,包括以下步骤:
33.控制顶升轴伸出吸盘工作面,通过上料操作将硅晶圆片移载于顶升轴上,
34.喷气口喷射高压空气,高压空气在硅晶圆片底部形成低压区,在硅晶圆片顶部形成高压区,调节喷气口喷出的高压空气的流速,使得硅晶圆片被稳定吸附于吸盘,顶升轴下降于吸盘工作面,硅晶圆片被气流悬浮约束于低压区和高压区之间;
35.驱动机带动硅晶圆片转动,进行加工;
36.加工完成后,硅晶圆片通过顶升轴顶升远离吸盘工作面,控制喷气口停止喷射高压空气,通过下料操作对硅晶圆片进行下料。
37.本技术实现的有益效果为:
38.本技术公开了一种自动化晶圆载台及其使用方法,硅晶圆片通过吸盘产生的负压吸附于吸盘,由于吸盘在吸附时,吸盘和硅晶圆片之间在形成有气面,硅晶圆片悬空地被约束到吸盘上,因此当硅晶圆片为翘曲较大的形态时,普通真空吸盘吸取不牢靠,本技术通过负压吸附,大大提高了稳定性。
39.进一步地,由于吸盘是通过喷气口产生负压来实现吸附效果的,所以吸盘在对硅晶圆片吸附的同时,还起到一定的散热效果。
40.本技术公开了一种自动化晶圆载台及其使用方法,通过在吸盘工作面设置顶升机构,实现载台上在竖直方向对硅晶圆片的升降移载,对于设备而言,节省一个取料z轴模组的成本和空间。
41.本技术公开了一种自动化晶圆载台及其使用方法,在载台侧部设置传感组件,包括感应片和光电开关,通过光电开关检测感应片,从而通过接通或分断控制电路,通过控制
所述电路从而实现对晶圆载台工作状态的控制。
42.同时,在载台一侧设置跟随载台同步转动的限位块,以及固定在限位块转动轨迹上的两个限位柱,对载台转动范围进行硬限位。
附图说明
43.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
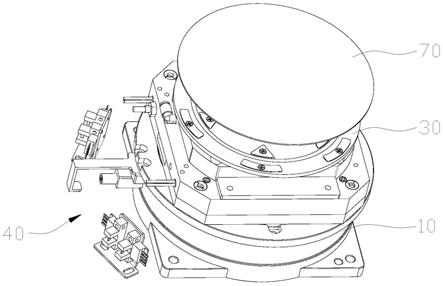
44.图1是本技术一种自动化晶圆载台的示意图;
45.图2是本技术一种自动化晶圆载台的示意图;
46.图3是本技术一种自动化晶圆载台的示意图;
47.图4是图3中a-a向的剖视图;
48.图5是本技术一种自动化晶圆载台的爆炸图;
49.图6是本技术顶升机构的示意图;
50.图7是本技术一种自动化晶圆载台顶料状态的示意图;
51.图8是本技术一种自动化晶圆载台加工状态的示意图;
52.图9是本技术传感组件和连接部的结构示意图;
53.图10是本技术一种自动化晶圆载台的示意图;
54.图中:
55.10-驱动机;
56.20-基座;
57.201-安装位;
58.30-吸盘;
59.301-顶升滑孔;302-喷气口;303-气管;
60.40-传感组件;
61.401-感应片;4012-接触部;402-光电开关;403-限位块;404-连接板;405-限位柱;
62.50-顶升机构;
63.501-顶升轴;502-固定板;503-伸缩杆;504-安装板;505-气缸;506-导向孔;507-导向轴;
64.60-连接部;
65.70-硅晶圆片。
具体实施方式
66.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
67.如背景技术中所述,现有大部分载台对翘曲(平面度较大)较大的产品,采用普通
吸附平台配合真空发生器使用时存在漏气吸不紧,载台高速运动时还有飞片(产品飞出载台)的安全隐患;有些产品激光加工时容易产生高温或产品微量变形,在高温较高产品易变形的情况下,吸盘高温下使用容易老化,普通打孔平台容易出现漏气,使用的局限性较大。为解决上述问题,本技术提供一种自动化晶圆载台,提供一种吸附效果稳定、适用范围广泛、具有散热功能以及产品升降功能的载台。
68.为实现上述技术效果,需要在工作台上固定安装驱动机10,驱动机10转轴上通过连接部60安装有基座20,基座20上部安装有吸盘30,吸盘30包括喷气口302和气管303,通过喷气口302开设于所述吸盘30的工作面;气管303一端连接于外部气源,一端连接于吸盘30给喷气口302提供高压空气,进一步地,喷气口302设置为环形,用于对所述硅晶圆片70底部均匀喷射高压空气,避免硅晶圆片70底部受力不均匀。
69.吸盘30采用伯努利原理,当喷气口302中喷出的气体遇到硅晶圆片70后,使自硅晶圆片70中心沿硅晶圆片70径向方向向外迅速扩散从而使得硅晶圆片70上部的气流速度低于硅晶圆片70下部的气流速度,此时硅晶圆片70底部气压小于其上部的气压,因而硅晶圆片70通过所述吸盘30形成的负压吸附。进一步地,所述硅晶圆片70和吸盘30之间的高压空气在流动时会形成气面,从而使得硅晶圆片70被吸附时,硅晶圆片70悬浮于吸盘30,当硅晶圆片70为翘曲较大的形态时,硅晶圆片70通过不接触的方式被吸盘30吸附,这样设置比普通真空吸盘吸取更加牢靠。
70.吸盘30吸附硅晶圆片70时,当需要取料时,在垂直方向上无法将硅晶圆片70进行托起,只能通过断开高压空气的输入或者从硅晶圆片70侧部提供较大的侧向力才能将产品移动,为了解决这一技术问题,本实施例中,给吸盘30设置顶升机构50,顶升机构50设置于吸盘30下方,顶升机构50被配置为对硅晶圆片70进行顶升。
71.本实施例中,为了防止顶升机构50干扰吸盘30吸附硅晶圆片70,将顶升机构50设置于吸盘30工作面之下,且在吸盘30安装的基座20中开设有安装位201,安装位201包括设置在基座20内部的阶梯孔,所述顶升机构50安装于所述阶梯孔内,所述顶升机构50安装于所述安装位201,所述顶升机构50还包括顶升轴501、安装板504、气缸505、固定板502、导向孔506以及导向轴507,其中,安装板504用于将顶升机构50安装于阶梯孔内;气缸505设于安装板504中部;固定板502通过气缸505的伸缩杆503升降连接于安装板504上方,固定板502上设有所述顶升轴501,吸盘30的工作面开设有顶升滑孔301,所述顶升轴501在所述顶升滑孔301中升降移动,从而顶升轴501对硅晶圆片70进行顶升。具体来讲,通过设置升降的顶升轴501,在不需要对硅晶圆片70进行顶升时,顶升轴501下降至吸盘30的工作面之下,避免顶升轴的存在对吸盘30吸附性能的干扰;当需要取料时,气缸505驱动顶升轴在垂直方向上将硅晶圆片70进行托起。
72.本实施例中,所述导向孔506开设于所述固定板502;导向轴507设置于安装板504,其中导向轴507与导向孔506同轴设置,导向孔506被配置为导向轴507的限位轨道。当顶升机构50运行时,导向轴507通过在导向孔506滑动,可以对固定板502进行约束,防止固定板502被气缸505推动时产生转动,避免顶升轴501与顶升滑孔301发生错位。
73.本实施例中,为了便于控制电路,需要对载台状态进行监测,本实施例通过设置传感组件40对载台的运动状态进行监控,其中传感组件40设置于载台侧部,所述传感组件40包括感应片401和光电开关402,感应片401沿连接部径向方向固定于连接部60外侧,所述光
电开关402对所述感应片401进行探测,具体地,光电开关402与所述驱动机10设置于同一工作台,所述驱动机10转动时,所述感应片401同步转动,固定在机台的光电开关402上对转动的感应片401进行检测,当感应片401转动到光电开关402的感应区域时,将载台的位置信息反馈给软件来控制驱动机需要纠偏的角度。
74.进一步地,连接部60为环状结构,所述连接部60与所述驱动机10的转动部同轴连接,在载台运行时,感应片401和限位块403跟随载台同轴转动,也就是说,载台运行时,感应片401和限位块403之间相对静止地跟随载台同步运转。
75.本实施例中,载台还包括限位块403和限位柱405,限位块通过感应片设置于连接部60一侧,限位柱405数量为两个,分别设置于两个光电开关402的外侧,限位柱405被配置为载台转动时对通过限位块403和限位柱405对载台转动范围进行限定。具体来讲,限位块403通过连接部60被载台带动同步转动,限位柱405固定于限位块403的转动轨迹上使得载台只能在两个限位柱405之间的限制范围进行转动,优选地,限位柱405为优力胶材质的圆柱,所述限位块403撞击到两根限位柱405上时没有过大的异响并起到一定缓冲作用。感应片401还包括接触部4012,所述感应片401末端折弯预设角度形成接触部4012,本事实例中,优选折弯角度为90
°
,接触部4012被折弯至水平位置,且在跟随载台转动时,接触部4012的转动轨迹位于光电开关402的感应区域,接触部4012被配置为所述光电开关402对感应片401的探测目标,从而通过反馈数据实现对载台运动状态的检测,从而在对所述硅晶圆片70进行加工时,根据载台运动状态对加工设备进行控制。当载台转动到一定角度时限位柱405通过限位块403对载台进行限位,使载台停转,此时感应片401转动于光电开关402的感应区域,读取驱动机编码器程序反馈到软件上记录,通过编码记录的位置,来控制驱动机需要纠偏的角度。
76.在一个实施方案中,进行激光剥离操作时,载台上方设置的加工设备为激光源,对硅晶圆片70照射激光剥离时,激光源需要根据工艺对照射硅晶圆片70的激光进行调节,也就是说,在载台带动硅晶圆片70旋转时,通过传感组件检测载台运动状态,如载台启停和载台转速,激光对硅晶圆片70进行照射剥离时,当载台被限位块和限位柱限位时,感应片401位于光电开关402的感应区域,读取驱动机编码器程序反馈到软件上记录,通过编码记录的位置,来控制驱动机需要纠偏的角度或者回零复位,相应地激光源的控制程序能根据预设加工工艺对激光源的输出功率进行控制,从而在载台的不同转速时通过激光源输出不同功率的激光而对硅晶圆片70进行加工。
77.进一步地,为了控制电路接通或分断,所述光电开关402被配置为探测所述感应片401的运动,优选地,本事实例采用限位光电开关,所述接触部4012设于感应片401的末端,所述感应片401被基座20带动的旋转路径上设置限位光电开关,限位光电开关的感应区域为所述接触部4012的运动路径,也就是说,当感应片401转动时,接触部4012在限位光电开关的感应区域内运动。
78.本实施例中,所述限位光电开关通过连接板404安装于机台,且安装于连接板404远离所述载台的一侧面,便于在感应片401转动时,限位光电开关对所述感应片401的接触部4012进行探测。本实施例中,光电开关402设置有两个,两个光电开关402间隔设置于所述感应片401旋转路径上。通过限位光电开关对接触部4012检测,从而通过预设程序控制电路,最终实现生产制造中,其他工序和自动化晶圆载台的协同控制。
79.本实施例在具体操作时,一种自动化晶圆载台的使用方法,包括以下步骤:
80.控制顶升轴501伸出吸盘30工作面,通过上料操作将硅晶圆片70移载于顶升轴501上;
81.喷气口302喷射高压空气,高压空气自圆盘中心沿硅晶圆片70径向外迅速扩散从而使得硅晶圆片70上部的气流速度在低于其下部,根据伯努利原理可知,此时硅晶圆片70底部气压小于其上部的气压,从而硅晶圆片70底部形成低压区,在硅晶圆片70顶部形成高压区,调节喷气口302喷出的高压空气的流速,使得硅晶圆片70被稳定吸附于吸盘30,顶升轴501下降于吸盘30工作面,硅晶圆片70被气流悬浮约束于低压区和高压区之间;
82.驱动机10带动硅晶圆片70转动,同时,加工设备对硅晶圆片70进行加工;
83.加工完成后,硅晶圆片70通过顶升轴501顶升远离吸盘30工作面,同时控制喷气口302停止喷射高压空气,通过下料操作对硅晶圆片70进行下料,硅晶圆片70从顶升轴501上移载离开,并将下料的硅晶圆片70放置于指定位置。
84.以上所述仅为本技术的较佳实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1