晶圆键合方法及晶圆键合设备与流程
1.本发明属于半导体领域,具体涉及一种晶圆键合方法及晶圆键合设 备。
背景技术:
2.半导体键合技术是指将两片同质或异质半导体材料经过表面清洗和活 化处理后,在一定的条件下直接结合,通过范德华力、分子力甚至原子力 使晶片键合成为一体的技术。晶圆与晶圆的键合是实现3d集成电路的关键 技术,晶圆键合技术中,晶圆键合对准精度是重要的表征参数。晶圆键合 的对准精度缺陷会严重影响工艺的后段制程,更进一步会影响电路的连接 功能性,会降低晶圆的良率。
3.目前键合设备的对准系统存在机械运动误差,影响着最终的对准精度; 上、下两组镜头在校准过程中还会形成位置差异,造成对准误差,进一步 影响对准精度。在晶圆键合工艺过程中,镜头识别不到对准标记,无法实 时对准,因此晶圆键合对准精度还有待提高。
技术实现要素:
4.本发明提供一种晶圆键合方法及晶圆键合设备,目的在于提高晶圆键 合对准精度。
5.为了实现上述目的,本发明提供了一种晶圆键合方法,包括:
6.将第一固定装置带动第一晶圆移动到位于上读取器和下读取器之间的 对准位置;所述第一固定装置具有第一通孔,所述第一晶圆沿厚度方向的 键合面一侧和远离键合面一侧均设置有对准标记;所述下读取器通过所述 第一通孔读取所述第一晶圆远离键合面一侧的所述对准标记,所述上读取 器读取所述第一晶圆的键合面一侧的所述对准标记;关联所述上读取器和 所述下读取器读取的所述第一晶圆厚度方向的两侧的所述对准标记的相对 位置;
7.将所述第一固定装置带动所述第一晶圆移动到传送位置;将第二固定 装置带动第二晶圆移动到所述对准位置;所述第二固定装置具有第二通孔, 所述第二晶圆沿厚度方向的键合面一侧和远离键合面一侧均设置有对准标 记,所述上读取器通过所述第二通孔读取所述第二晶圆远离键合面一侧的 所述对准标记,所述下读取器读取所述第二晶圆的键合面一侧的对准标记; 关联所述上读取器和所述下读取器读取的所述第二晶圆厚度方向的两侧的 所述对准标记的相对位置;
8.将所述第一固定装置带动所述第一晶圆从所述传送位置移动到所述对 准位置;所述上读取器读取所述第二晶圆远离键合面一侧的所述对准标记, 所述下读取器读取所述第一晶圆远离键合面一侧的对准标记,结合关联的 所述第二晶圆厚度方向的两侧的所述对准标记的相对位置,以及关联的所 述第一晶圆厚度方向的两侧的所述对准标记的相对位置,得到所述第二晶 圆和所述第一晶圆各自键合面一侧的对准标记的相对位置,据此实时调整 所述第一固定装置以使所述第一晶圆与所述第二晶圆对准。
9.进一步的,还包括:将所述第一固定装置带动所述第一晶圆在垂直于 所述第二固定装置的方向上移动到键合位置,所述上读取器和所述下读取 器再次识别所述第二晶圆和所述第一晶圆各自远离键合面一侧的对准标 记,进一步调整所述第一固定装置,直至对准精度在设置范围内进行键合。
10.进一步的,所述第一晶圆厚度方向的两侧的对准标记在平行于所述第 一晶圆的平面上的投影不重合;所述第二晶圆厚度方向的两侧的对准标记 在平行于所述第二晶圆的平面上的投影不重合。
11.进一步的,所述第一晶圆的键合面一侧的对准标记与所述第二晶圆的 键合面一侧的对准标记匹配设置。
12.进一步的,所述上读取器和所述下读取器在垂直于所述第二固定装置 的方向上对齐。
13.进一步的,所述第一晶圆厚度方向的两侧的对准标记设置区域范围小 于所述上读取器和所述下读取器的视野范围;所述第二晶圆厚度方向的两 侧的对准标记设置区域范围小于所述上读取器和所述下读取器的视野范 围。
14.本发明还提供一种晶圆键合设备,包括:
15.可移动且相对平行设置的第一固定装置和第二固定装置,其中,所述 第一固定装置具有第一通孔,所述第二固定装置具有第二通孔;所述第一 固定装置用于固定第一晶圆,所述第一晶圆沿厚度方向的键合面一侧和远 离键合面一侧均设置有对准标记;所述第二固定装置用于固定第二晶圆, 所述第二晶圆沿厚度方向的键合面一侧和远离键合面一侧均设置有对准标 记;
16.上读取器和下读取器,所述上读取器用于读取所述第一晶圆的键合面 一侧的所述对准标记,或者通过所述第二通孔读取所述第二晶圆沿所述厚 度方向远离键合面一侧的所述对准标记;所述下读取器用于通过所述第一 通孔读取所述第一晶圆远离键合面一侧的所述对准标记,或者读取所述第 二晶圆的键合面一侧的所述对准标记;
17.处理器,其分别与所述上读取器、所述下读取器、所述第一固定装置 和第二固定装置耦接,用于对所述上读取器和下读取器读取的所述第一晶 圆厚度方向的两侧的所述对准标记的相对位置进行关联,以及对所述第二 晶圆厚度方向的两侧的所述对准标记的相对位置进行关联,并结合相应的 关联信息,控制实时调整所述第一固定装置以使所述第一晶圆与所述第二 晶圆对准。
18.进一步的,所述上读取器和所述下读取器在平行于所述第二固定装置 的平面内锁定,只能在垂直于所述第二固定装置的方向移动。
19.进一步的,所述上读取器包括上镜头,所述下读取器包括下镜头,所 述上镜头和所述下镜头在垂直于所述第二固定装置的方向对齐。
20.进一步的,所述第一固定装置包括:第一基座、位置可调的第一调整 台以及与所述第一调整台固定连接且用于固定所述第一晶圆的第一卡盘, 所述第一通孔贯穿所述第一基座、所述第一调整台和所述第一卡盘;
21.所述第二固定装置包括:第二基座、位置可调的第二调整台以及与所 述第二调整台固定连接且用于固定所述第二晶圆的第二卡盘,所述第二通 孔贯穿所述第二基座、所述第二调整台和所述第二卡盘。
22.与现有技术相比,本发明具有如下有益效果:
23.本发明提供一种晶圆键合方法以及晶圆键合设备,在第一固定装置中 设置第一通孔,以及在第二固定装置中设置第二通孔;第一晶圆和第二晶 圆沿厚度方向的键合面一侧和远离键合面一侧均设置对准标记;处理器分 别关联所述第一晶圆厚度方向的两侧的对准标记的相对位置和所述第二晶 圆厚度方向的两侧的对准标记的相对位置;上、下读取器通过对应的通孔 能分别读取第二晶圆和第一晶圆各自远离键合面一侧的对准标记,结合关 联的所述第一晶圆厚度方向的两侧的对准标记的相对位置以及关联的所述 第二晶圆厚度方向的两侧的对准标记的相对位置,如此可精确得知第二晶 圆和第一晶圆各自键合面一侧对准标记的相对位置(偏差),据此可实时调 整所述第一固定装置以使所述第一晶圆与所述第二晶圆对准,可根据对准 情况进行实时校正。能够精确测得第二晶圆和第一晶圆实际偏差(即第二 晶圆和第一晶圆各自键合面一侧对准标记的相对位置偏差),该实际偏差包 含移动时的机械运动误差,精确测得后进一步调整所述第一固定装置补偿, 提高了对准精度,从而提升晶圆键合质量。
24.进一步的,所述上读取器和所述下读取器在平行于所述第二固定装置 的平面内锁定,只能在垂直于所述第二固定装置的方向(z方向)移动, 以减少运动误差。
附图说明
25.图1为本发明实施例的晶圆键合方法流程示意图。
26.图2为本发明实施例的第一晶圆和第二晶圆对准标记示意图。
27.图3为本发明实施例的识别第一晶圆两侧的对准标记示意图。
28.图4为本发明实施例的识别第二晶圆两侧的对准标记示意图。
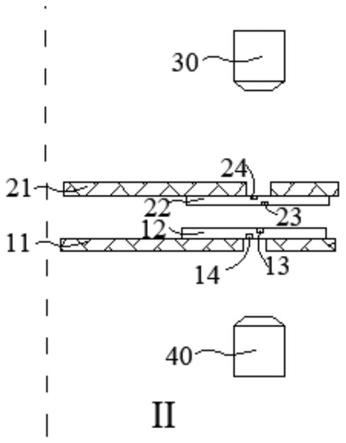
29.图5为本发明实施例的识别第二晶圆和第一晶圆各自远离键合面一侧 的对准标记的示意图。
30.图6为本发明实施例的第二晶圆和第一晶圆对准键合示意图。
31.其中,附图标记如下:
32.11-第一固定装置;12-第一晶圆;13-第一标记;14-第三标记;v
1-第一 通孔;21-第二固定装置;22-第二晶圆;23-第二标记;24-第四标记;v2‑ꢀ
第二通孔;i-传送位置;ii-对准位置;30-上读取器;40-下读取器。
具体实施方式
33.如背景技术所述,晶圆键合对准精度还有待提高。
34.具体的,一种晶圆键合对准系统中,设置有上、下两组镜头组件以分 别识别键合的上、下晶圆的对准标记。下平台上设置有下卡盘,下卡盘吸 附固定下晶圆。上平台上设置有上卡盘,上卡盘吸附固定上晶圆。主要对 准过程包括:下平台带动下晶圆运动到对准位置,上读取器识别并读取下 晶圆对准标记,接着下平台带动下晶圆离开对准位置并移动到传送位置; 接着上平台带动上晶圆移动到对准位置,下读取器识别并读取上晶圆对准 标记;接着上平台锁定,下平台运动到对准位置,通过上、下读取器读取 的对准标记计算上、下晶圆的对准标记误差,补偿下平台位置误差,使下 平台带动下晶圆通过位置调整实现与上晶圆的对准。
35.在晶圆键合工艺中,上、下晶圆对准需要移动上、下卡盘以及上、下 平台,在移动过程中,会造成移动误差。上、下平台移动时的机械运动误 差无法通过反馈系统补偿,造成产品精度损失。晶圆在键合时,由于上晶 圆正面(正面有对准标记)面向下晶圆正面(正面有对准标记)键合,上 读取器朝向上平台和上晶圆背面(背面无对准标记),上读取器被上平台遮 挡无法识别上晶圆;下读取器朝向下平台和下晶圆背面(背面无对准标记), 下读取器被下平台遮挡无法识别下晶圆;因此上、下两晶圆面对面键合时, 上、下读取器无法识别晶圆上的对准标记,无法对对准情况进行实时校正。
36.以下结合附图和具体实施例对本发明的晶圆键合方法及晶圆键合设备 进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需要说 明的是,附图均采用非常简化的形式且使用非精准的比例,仅用以方便、 明晰地辅助说明本发明实施例的目的。
37.图1为本发明实施例的晶圆键合方法流程示意图,如图1所示,一种 晶圆键合方法,包括:
38.步骤s1、将第一固定装置带动第一晶圆移动到位于上读取器和下读取 器之间的对准位置;所述第一固定装置具有第一通孔,所述第一晶圆沿厚 度方向的键合面一侧和远离键合面一侧均设置有对准标记;所述下读取器 通过所述第一通孔读取所述第一晶圆远离键合面一侧的所述对准标记,所 述上读取器读取所述第一晶圆的键合面一侧的所述对准标记;关联所述上 读取器和所述下读取器读取的所述第一晶圆厚度方向的两侧的所述对准标 记的相对位置;
39.步骤s2、将所述第一固定装置带动所述第一晶圆移动到传送位置;将 第二固定装置带动第二晶圆移动到所述对准位置;所述第二固定装置具有 第二通孔,所述第二晶圆沿厚度方向的键合面一侧和远离键合面一侧均设 置有对准标记,所述上读取器通过所述第二通孔读取所述第二晶圆远离键 合面一侧的所述对准标记,所述下读取器读取所述第二晶圆的键合面一侧 的所述对准标记;关联所述上读取器和所述下读取器读取的所述第二晶圆 厚度方向的两侧的所述对准标记的相对位置;
40.步骤s3、将所述第一固定装置带动所述第一晶圆从所述传送位置移动 到所述对准位置;所述上读取器读取所述第二晶圆远离键合面一侧的所述 对准标记,所述下读取器读取所述第一晶圆远离键合面一侧的对准标记, 结合关联的所述第二晶圆厚度方向的两侧的所述对准标记的相对位置,以 及关联的所述第一晶圆厚度方向的两侧的所述对准标记的相对位置,得到 所述第二晶圆和所述第一晶圆各自键合面一侧的对准标记的相对位置,据 此实时调整所述第一固定装置以使所述第一晶圆与所述第二晶圆对准。
41.应当理解,步骤s1和步骤s2分别关联所述第一晶圆厚度方向的两侧 的对准标记的相对位置,以及关联所述第二晶圆厚度方向的两侧的对准标 记的相对位置;先关联第一晶圆还是第二晶圆厚度方向的两侧的对准标记 的相对位置均可以,所以步骤s1和步骤s2的先后顺序不做限定,先执行 步骤s1再执行步骤s2或者先执行步骤s2再执行步骤s1均是可以的。
42.以下结合图2至图6,详细介绍本发明实施例的晶圆键合方法及晶圆 键合设备。
43.如图2所示,第一晶圆12沿厚度方向的键合面一侧和远离键合面一侧 均分布对准标记,且两侧的对准标记在垂直于第一晶圆12的方向(第一晶 圆12厚度方向)错开,即所述第一晶圆12厚度方向的两侧的对准标记(例 如第一标记13和第三标记14)在平行于所述第
一晶圆12的平面上的投影 不重合,以使后续上、下读取器分别读取时互相不干涉。示例性的,第一 晶圆12的厚度方向的两侧分别设置有第一标记13和第三标记14,第一标 记13的上表面和第三标记14的下表面均处于露出未被遮挡状态,以便于 后续镜头识别。第一标记13和第三标记14可嵌设在第一晶圆12中,也可 设置在第一晶圆12厚度方向的两侧表面。
44.第二晶圆22沿厚度方向的键合面一侧和远离键合面一侧均设置有对 准标记,且两侧的对准标记在垂直于第二晶圆22的方向(第二晶圆22厚 度方向)错开,即所述第二晶圆22厚度方向的两侧的对准标记(例如第二 标记23和第四标记24)在平行于所述第二晶圆22的平面上的投影不重合, 以使后续上、下读取器分别读取时互相不干涉。示例性的,第二晶圆22的 厚度方向的两侧分别设置有第二标记23和第四标记24,第二标记23的下 表面和第四标记24的上表面均处于露出未被遮挡状态,以便于后续镜头识 别。第二标记23和第四标记24均可嵌设在第二晶圆22中,也可设置在第 二晶圆22厚度方向的两侧表面。
45.示例性的,第二晶圆22的第二标记23所在的面为键合面,第二晶圆 22的第四标记24所在的面为远离键合面(与键合面相对的面)。第一晶圆 12的第一标记13所在的面为键合面,第一晶圆12的第三标记14所在的 面为远离键合面(与键合面相对的面)。例如第二晶圆22的第二标记23所 在的面与第一晶圆12的第一标记13所在的面键合。第二晶圆22的第二标 记23与第一晶圆12的第一标记13匹配设置;第一标记13、第二标记23、 第三标记14和第四标记24为金属图案或介质层图案。金属图案中的金属 材料为铝、铜和钨中的任意一种。介质层图案中的介质层材料例如为氧化 硅和/或氮化硅。第一标记13、第二标记23、第三标记14和第四标记24 的图案可包括三角形图案、不交叉的条形图案以及相互交叉的条形图案等。 第一标记13、第二标记23、第三标记14和第四标记24的数量不做限制, 根据实际需要设置。
46.第一晶圆12与第二晶圆22均可由适合于半导体装置的任何半导体材 料(诸如si、sic、sige等)制成,可以为绝缘体上硅(soi)、绝缘体上锗硅 等各种半导体。第一晶圆12与第二晶圆22中均可以形成有各种装置(不限 于半导体装置)构件,例如:栅极结构、接触孔、介质层、金属连线和通孔 等等。
47.如图3所示,提供键合设备,所述键合设备包括可移动且相对平行设 置的第一固定装置11、第二固定装置21、上读取器30和下读取器40、以 及处理器(未示出),所述处理器分别与所述上读取器30、所述下读取器 40、所述第一固定装置11和第二固定装置21耦接,其中,所述第一固定 装置11具有第一通孔v1,所述第二固定装置21具有第二通孔v2,使第一 晶圆12和第二晶圆22各自远离键合面的一侧的标记(例如第三标记14和 第四标记24)可以分别被下读取器40和上读取器30识别。
48.将第一晶圆12固定在所述第一固定装置11上,以及将所述第二晶圆 22固定在所述第二固定装置21上;所述第一晶圆的厚度方向的两侧分别 设置有第一标记13和第三标记14;第二晶圆22的厚度方向的两侧分别设 置有第二标记23和第四标记24。第一通孔v1暴露出第三标记14,以使第 三标记14能被下读取器40读取。第二通孔v2暴露出第四标记24,以使第 四标记24能被上读取器30读取。
49.在一实施例中,上读取器30和下读取器40在平行于第二固定装置21 的平面内锁定(例如水平面内x方向和y方向均不能移动),只能在垂直 于第二固定装置21(例如竖直方向)z方向移动,减少运动误差。
50.晶圆键合设备还可包括镜头校准标志,所述镜头校准标志可设置在第 一固定装置11或第二固定装置21上,用于校准上读取器30和所述下读取 器40的位置,测得上读取器30和所述下读取器40的相对位置,通过调整 使上读取器30和所述下读取器40在垂直于所述第二固定装置21的方向(z 方向)上对齐。
51.将第一固定装置11带动第一晶圆12移动到位于上读取器30和下读取 器40之间的对准位置ii;所述第一晶圆12厚度方向的两侧的对准标记(例 如第一标记13和第三标记14)设置区域范围小于所述上读取器30和所述 下读取器40的视野范围,以使第一晶圆12厚度方向的两侧的对准标记可 分别被上读取器30和所述下读取器40读取。所述第一固定装置11具有第 一通孔v1,所述第一晶圆12沿厚度方向的两侧均设置有对准标记;调整 上读取器30在z方向位置,直至上读取器30能清晰的读取第一晶圆12 键合面一侧的第一标记13,调整下读取器40在z方向位置,直至下读取 器40能清晰的读取第一晶圆12远离键合面一侧的第三标记14。下读取器 40通过所述第一通孔v1读取所述第一晶圆12远离键合面一侧的对准标记 (例如第三标记14),上读取器30读取所述第一晶圆12键合面一侧的对 准标记(例如第一标记13);处理器关联所述第一晶圆12厚度方向的两侧 的对准标记(例如第一标记13和第三标记14)的相对位置。具体的,上 读取器30读取的第一标记13的图像和下读取器40读取的第三标记14的 图像均发送给处理器,处理器通过图像处理计算出第一标记13和第三标记 14的相对位置信息,即完成处理器关联所述第一晶圆12厚度方向的两侧 的对准标记(例如第一标记13和第三标记14)的相对位置。应当理解第 一标记13和第三标记14位于第一晶圆12的厚度方向的两侧,第一标记 13和第三标记14的相对位置不受机械运动的影响。第一晶圆12沿厚度方 向的任一表面均可以作为键合面与第二晶圆22键合,同理,第二晶圆22 沿厚度方向的任一表面均可以作为键合面与第一晶圆12键合。
52.如图4所示,将所述第一固定装置11带动第一晶圆12移动到传送位 置i;将所述第二固定装置21带动第二晶圆22移动到对准位置ii,所述第 二固定装置21具有第二通孔,所述第二晶圆22沿厚度方向的两侧均设置 有对准标记(例如第二标记23和第四标记24),所述上读取器30通过所 述第二通孔读取所述第二晶圆22远离键合面一侧的对准标记(例如第四标 记24),所述下读取器40读取所述第二晶圆22键合面一侧的对准标记(例 如第二标记23);所述第二晶圆22沿厚度方向的两侧的对准标记(例如第 二标记23和第四标记24)设置区域范围小于所述上读取器30和所述下读 取器40的视野范围;以使第二晶圆22的厚度方向的两侧的对准标记可分 别被上读取器30和所述下读取器40读取。具体的,调整上读取器30在z 方向位置,直至上读取器30能清晰的读取第二晶圆22远离键合面一侧的 第四标记24,调整下读取器40在z方向位置,直至下读取器40能清晰的 读取第二晶圆22键合面一侧的第二标记23,处理器关联所述第二晶圆22 沿厚度方向的两侧的对准标记(例如第二标记23和第四标记24)的相对 位置。具体的,上读取器30读取的第四标记24的图像和下读取器40读取 的第二标记23的图像均发送给处理器,处理器通过图像处理计算出第二标 记23和第四标记24的相对位置信息,即完成处理器关联所述第二晶圆22 沿厚度方向的两侧的对准标记(例如第二标记23和第四标记24)的相对 位置。应当理解第二标记23和第四标记24位于第二晶圆22的厚度方向的 两侧,第二标记23和第四标记24的相对位置不受机械运动的影响。
53.如图5所示,具体的,将所述第一固定装置11带动第一晶圆12从传 送位置i移动到
对准位置ii。上、下读取器z向移动,分别识别第二晶圆 和第一晶圆各自远离键合面一侧的对准标记,根据关联的第二晶圆22两侧 的对准标记的相对位置,以及关联的第一晶圆12两侧的对准标记的相对位 置,得到第二晶圆和第一晶圆各自键合面一侧的对准标记相对位置,据此 实时调整第一固定装置以使第一晶圆与第二晶圆对准。具体的,调整上读 取器30在z方向位置,直至上读取器30能清晰的读取第二晶圆22远离 键合面一侧的第四标记24;调整下读取器40在z方向位置,直至下读取 器40能清晰的读取第一晶圆12远离键合面一侧的第三标记14。上读取器 30读取的第四标记24的图像和下读取器40读取的第三标记14的图像均 发送给处理器,处理器结合之前关联的第一标记13和第三标记14的相对 位置,以及关联的第二标记23和第四标记24的相对位置,计算出此时位 于第一晶圆12和第二晶圆22各自键合面的第一标记13与第二标记23的 相对位置,从而知道第一晶圆12和第二晶圆22是否对准。若没对准,根 据第一标记13与第二标记23的相对位置,计算出所述第一固定装置的调 整值,控制实时调整第一固定装置11,使第一晶圆12与第二晶圆22对准。 上读取器30和下读取器40读取的标记可拍摄成图片传输给处理器,处理 器进行图像处理,计算出第一晶圆要移动的精确距离,控制第一固定装置 11,将第一晶圆移动到与第二晶圆精确对准的位置,实现所述第二晶圆和 第一晶圆的对准。
54.如图6所示,接着,将所述第一固定装置11带动所述第一晶圆12在 垂直于所述第二固定装置21的方向(z方向)上移动到键合位置,具体使 第一晶圆12沿z方向靠近第二晶圆22,使第一晶圆12与第二晶圆22的 距离在键合距离范围。上读取器30和下读取器40再次识别第二晶圆22和 第一晶圆12各自远离键合面一侧的对准标记(第四标记24和第三标记14), 进一步调整所述第一固定装置11对准,直至对准精度在设置范围内进行键 合。
55.本实施例还提供一种晶圆键合设备,如图3至图6所示,包括:
56.可移动且相对平行设置的第一固定装置11和第二固定装置21,其中, 所述第一固定装置11具有第一通孔v1,所述第二固定装置21具有第二通 孔v2,所述第一固定装置11用于固定第一晶圆12,所述第一晶圆12沿厚 度方向的键合面一侧和远离键合面一侧均设置有对准标记;所述第二固定 装置21用于固定第二晶圆22,所述第二晶圆22沿厚度方向的键合面一侧 和远离键合面一侧均设置有对准标记;
57.上读取器30和下读取器40,所述上读取器30用于读取所述第一晶圆 11键合面一侧的对准标记,或者通过所述第二通孔v2读取所述第二晶圆 22沿所述厚度方向远离键合面一侧的对准标记;所述下读取器40用于通 过所述第一通孔v1读取所述第一晶圆12远离键合面一侧的对准标记,或 者读取所述第二晶圆22键合面一侧的对准标记;
58.处理器(未示出),其分别与所述上读取器30、所述下读取器40、所 述第一固定装置11和第二固定装置21耦接,且用于对所述上读取器30和 所述下读取器40读取的所述第一晶圆12厚度方向的两侧的对准标记的相 对位置进行关联,以及对所述第二晶圆22厚度方向的两侧的对准标记的相 对位置进行关联;并结合相应的关联信息,控制实时调整所述第一固定装 置11以使所述第一晶圆12与所述第二晶圆22对准。
59.示例性的,如图3所示,仅所述第一固定装置11移动到对准位置ii 时,所述下读取器40用于通过所述第一通孔读取所述第一晶圆12厚度方 向远离键合面一侧的对准标记,所述上读取器30用于读取所述第一晶圆 12键合面一侧的对准标记;处理器关联所述第一晶圆12的厚度方向的两 侧的对准标记的相对位置;具体的,上读取器30读取的第一标记13
的图 像和下读取器40读取的第三标记14的图像均发送给处理器,处理器通过 图像处理计算出第一标记13和第三标记14的相对位置信息,即完成处理 器关联所述第一晶圆12厚度方向的两侧的对准标记(例如第一标记13和 第三标记14)的相对位置。
60.如图4所示,仅所述第二固定装置21移动到所述对准位置ii时,所述 上读取器30用于通过所述第二通孔读取所述第二晶圆22沿厚度方向远离 键合面一侧的对准标记,所述下读取器40用于读取所述第二晶圆22键合 面一侧的对准标记;处理器关联所述第二晶圆22的厚度方向的两侧的对准 标记的相对位置;具体的,上读取器30读取的第四标记24的图像和下读 取器40读取的第二标记23的图像均发送给处理器,处理器通过图像处理 计算出第二标记23和第四标记24的相对位置信息,即完成处理器关联所 述第二晶圆22沿厚度方向的两侧的对准标记(例如第二标记23和第四标 记24)的相对位置。
61.如图5所示,所述第一固定装置11和所述第二固定装置21均移动到 所述对准位置ii时,所述上读取器30用于读取所述第二晶圆22远离键合 面一侧的对准标记,所述下读取器40用于读取所述第一晶圆12远离键合 面一侧的对准标记。所述处理器接收所述上读取器30和所述下读取器40 分别发送的图像,并结合之前关联的所述第一标记13和第三标记14的相 对位置,以及关联的所述第二标记23和第四标记24的相对位置,计算出 此时位于第一晶圆12和第二晶圆22各自键合面一侧的第一标记13与第二 标记23的相对位置,从而计算出所述第一固定装置11的调整值,实时调 整第一固定装置11,使第一晶圆12与第二晶圆22对准。
62.在一实施例中,所述上读取器30和所述下读取器40在平行于所述第 二固定装置21的平面内锁定,只能在垂直于所述第二固定装置21的方向 移动,以减少运动误差。
63.所述上读取器30包括上镜头,所述下读取器40包括下镜头,所述上 镜头和所述下镜头在垂直于所述第二固定装置21的方向对齐。上读取器 30和下读取器40均可包括用于读取(识别)晶圆上的对准标记并且检测 对准标记的位置的光学设备。读取器包括光源、相机和相机上的光学镜头。 例如,读取器可以包括一个或多个红外(ir)电荷耦合器件(ccd)观察镜。在 一些实施例中,读取器还可以包括用于定位键合对准标记的任何合适的光 学设备,例如线性可变差动转换器(lvdt)、激光干涉仪或光学线性编码器 和解码器等。相机可以是单色或彩色的,不限是cdd或cmos的,不限 分辨率,也不限是模拟或数字的。相机前端可以装有决定视场大小的镜头 (可以有多个可切换)。
64.示例性,所述第一固定装置11包括:第一基座、位置可调的第一调整 台以及与所述第一调整台固定连接且用于固定所述第一晶圆的第一卡盘 (未示出),所述第一通孔贯穿所述第一基座、所述第一调整台和所述第一 卡盘。
65.所述第二固定装置21包括:第二基座、位置可调的第二调整台以及与 所述第二调整台固定连接且用于固定所述第二晶圆的第二卡盘(未示出), 所述第二通孔贯穿所述第二基座、所述第二调整台和所述第二卡盘。
66.示例性的,所述晶圆键合设备还包括气浮装置,所述气浮装置用于使 所述第一固定装置11气悬浮,以调整所述第一固定装置11的位置。所述 第一固定装置11中设有至少一个马达(未示出),较佳的,所述马达为4 个,4个所述马达位于所述第一固定装置11的四角。第一固定装置11中设 有气流通道(未示出)。当所述第一固定装置11移动到对准位置ii时,对所 述第一固定装置11的位置进行调整。具体的,所述气浮装置向所述气流通 道内通气
以使所述第一固定装置11气悬浮,然后启动马达,所述马达带动 所述第一固定装置11在平行于第二固定装置21的平面内移动;待所述第 一固定装置11调整到预定位置时关闭所述马达和所述气浮装置,使所述第 一固定装置11解除气悬浮状态。
67.综上所述,本发明提供一种晶圆键合方法以及晶圆键合设备,在第一 固定装置中设置第一通孔,以及在第二固定装置中设置第二通孔;第一晶 圆和第二晶圆沿厚度方向的键合面一侧和远离键合面一侧均设置对准标 记;处理器分别关联所述第一晶圆厚度方向的两侧的对准标记的相对位置 和第二晶圆厚度方向的两侧的对准标记的相对位置;上、下读取器通过对 应的通孔能分别读取第二晶圆和第一晶圆各自远离键合面一侧的对准标 记,结合关联的所述第一晶圆的厚度方向的两侧的对准标记的相对位置以 及关联的第二晶圆的厚度方向的两侧的对准标记的相对位置,如此可精确 得知第二晶圆和第一晶圆各自键合面一侧对准标记的相对位置(偏差),据 此可实时调整所述第一固定装置以使所述第一晶圆与所述第二晶圆对准, 可根据对准情况进行实时校正。能够精确得知第二晶圆和第一晶圆各自键 合面一侧对准标记的相对位置偏差,该相对位置偏差包含移动时的机械运 动误差,精确测得后进一步调整所述第一固定装置补偿,提高了对准精度, 从而提升晶圆键合质量。
68.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的 都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即 可。对于实施例公开的器件而言,由于与实施例公开的方法相对应,所以 描述的比较简单,相关之处参见方法部分说明即可。
69.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何 限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修 饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1