应力传感器及其操作方法与流程
1.本公开的领域总体上涉及应力传感器,并且更具体地,涉及包括被配置用于应力监测的桥接电路的应力传感器及其操作方法。
背景技术:
2.许多电气系统在制造在半导体晶片(包括但不限于例如硅晶片)上的电子电路中实现或包括制造在半导体晶片上的电子电路。半导体晶片的加工和封装有时会在从晶片本身切下的晶粒上引入机械应力,这是由于锯切操作本身或随后的用于将晶粒封在封装内的模制工艺造成的。这种应力可能会影响电气系统、其电路及其结构的性能。例如,封装后应力对模数转换器、数模转换器和电压基准电路的精度有显着影响。这种应力可能进一步影响在晶片上实现的晶体管中的载流子迁移率。因此,应力传感器通常被集成到电子电路中,以表征作用于较大电路或片上系统(soc)的机械应力。
3.需要有如下这样的简单的应力传感器:(1)准确且易于读取,并且(2)提供高灵敏度、高分辨率和改进的稳定性。
技术实现要素:
4.根据本公开的一个方面,提供一种应力传感器电路。该应力传感器电路包括被配置为承受机械应力的基底,以及设置在基底上并联接在输出节点与接地节点之间的桥接电路。该桥接电路包括具有值为r1的第一电阻器的第一支路,其中,该第一电阻器在第一中间节点处联接到值为r的可调电阻器。该桥接电路还包括具有值为r2的第二电阻器的第二支路,其中,该第二电阻器在第二中间节点处联接到值为rref的可变基准电阻器,其中,该可变基准电阻器被配置为扫过多个离散值rref。该桥接电路还包括放大器,该放大器具有联接到第一中间节点的正输入端和联接到第二中间节点的负输入端。该放大器被配置为根据施加到基底的机械应力和值rref在输出节点处产生数字电压输出。
5.根据本公开的另一方面,提供一种测量基底上的机械应力的方法。该方法包括向联接在输出节点与地之间的桥接电路提供电压源。该桥接电路包括具有值为r1的第一电阻器的第一支路以及具有值为r2的第二电阻器的第二支路,其中,该第一电阻器联接到值为r的可调电阻器,其中,该第二电阻器联接到值为rref的可变基准电阻器。该方法还包括通过将可变基准电阻器扫过多个离散值rref并读取输出节点处根据机械应力和值rref而变化的数字电压输出来改变值rref。
6.根据本公开的还一方面,提供一种应力传感器系统。该系统包括被配置为承受机械应力的基底和设置在基底上并联接在输出节点与接地节点之间的桥接电路。该桥接电路包括具有值为r1的第一电阻器的第一支路以及具有值为r2的第二电阻器的第二支路,其中,该第一电阻器在第一中间节点处联接到值为r的可调电阻器,并且其中,该第二电阻器在第二中间节点处联接到值为rref的可变基准电阻器。该桥接电路还包括放大器,该放大器具有联接到第一中间节点的正输入端和联接到第二中间节点的负输入端。该放大器被配
置为根据施加到基底的机械应力和值rref在输出节点处产生数字电压输出。该系统还包括联接到可变基准电阻器和输出节点的微处理器。该微处理器被配置为控制可变基准电阻器扫过多个离散值rref,并读取输出节点处的数字输出。
7.已经讨论的特征、功能和优点可以在各种实施方式中独立实现或者可以在其他实施方式中相互组合,其进一步的细节可以参考以下描述和附图看到。
附图说明
8.图1是应力传感器电路的一个实施方式的示意图;
9.图2是对图1所示的应力传感器电路内的电阻值偏移的示例性数字电压输出响应的曲线图;
10.图3是对图1所示的应力传感器电路内的基准电阻值的受控变化的示例性数字电压输出响应的曲线图;
11.图4是测量基底上的机械应力的方法的一个实施方式的流程图;以及
12.图5是测量基底上的机械应力的方法的另一个实施方式的流程图。
具体实施方式
13.如本文所使用的,以单数形式叙述且前面有量词“一”或“一个”的元件或步骤应被理解为不排除复数个元件或步骤,除非明确叙述了这种排除。此外,对本发明的“一个实施方式”或“示例性实施方式”的引用并不意在被解释为排除也包含所述特征的额外实施方式的存在。
14.本文描述的应力传感器的实施方式提供了结构上类似于某些精密电压基准(pvr)电路的桥接电路,例如被转让给伊利诺伊州芝加哥的波音公司的、标题为“precision voltage reference circuit with tunable resistance”的美国专利号9,405,305中描述的pvr电路(其全部内容通过引用并入本文),或转让给伊利诺伊州芝加哥的波音公司的标题为“stress sensor”的美国专利号10,704,969中描述的应力传感器电路(其全部内容通过引用并入本文)。这种pvr电路通常被设计为在不同老化、温度变化和辐射事件下提供稳定的电压输出。这种精度至关重要,因为即使电压基准的微小变化也会转变为加速度、位置和旋转的误差。例如,一些运载工具(例如远程制导运载工具,包括洲际导弹和航天器)使用基于惯性摆的导航系统、基于陀螺仪的导航系统或两者的某种组合来满足其对精度和准确性误差的低容忍度。
15.本公开的系统和方法提高了应力传感器的稳定性和分辨率,使得其输出对温度、电源、频率和其他环境变量的不期望变化特别有弹性。应力传感器的一个电阻元件在触发阈值之间被数字地驱动,在所述阈值处,应力传感器的电压输出在高输出与低输出(例如,记为“1”的高输出和记为“0”低输出)之间切换或触发。所公开的系统和方法利用这些应力传感器的滞后性质和平均的优点以促进以高分辨率对这些触发阈值的数字表示的识别。无需在应力传感器内使用adc即可实现这些优势。本公开的系统和方法还依赖于如本文进一步描述的应力传感器的电压输出特性,其有效地模拟数字输出使得该输出可以直接提供给数字设备(例如,微控制器、微处理器、现场可编程门阵列(fpga)等)。
16.本文所描述的应力传感器还可以实现在集成到较大机械结构中的半导体晶片上,
其中较大机械结构的机械应变与半导体晶片本身的机械应变紧密关联。这样的实施方式能够对较大机械结构上的局部应力进行微尺度监测。本文所描述的应力传感器的实施方式提供更高的灵敏度、更简单的实施和更容易的操作,例如更简单且更准确的数字读数。
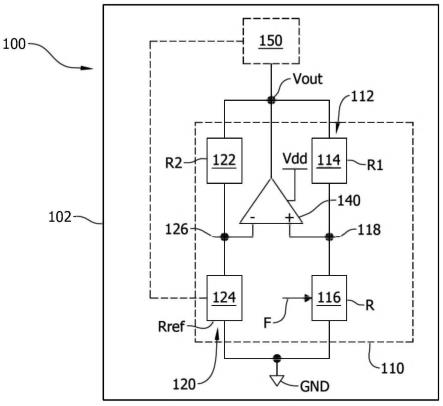
17.图1是设置在基底102上的应力传感器电路100的一个实施方式的示意图。应力传感器电路100包括联接在输出节点vout与接地节点gnd之间的桥接电路110。输出节点和存在于输出节点上的输出电压在本文中可互换地称为vout。桥接电路110包括第一支路112,有时称为调谐支路,其具有值为r1的电阻器114和值为r的另一个电阻器116。在第一支路112内,在电阻器114与电阻器116之间,是第一中间节点118。桥接电路110还包括第二支路120,有时称为可变支路,其具有值为r2的电阻器122和值为rref的可变基准电阻器124。在第二支路120内,在电阻器122与电阻器124之间,是第二中间节点126。在某些实施方式中,分别在第一支路112和第二支路120中的电阻器114和电阻器122以及电阻器124是精密电阻器,使它们温度稳定且辐射稳定。在某些实施方式中,电阻器114和电阻器122具有相同的值,而在其他实施方式中,电阻器114和电阻器122具有不同的值。此外,虽然电阻器114和电阻器122被示为具有相同的取向,但在一些实施方式中,电阻器122的取向与电阻器114基本正交。
18.桥接电路110还包括作为第一中间节点118与第二中间节点126之间的桥联接的放大器140。放大器140被提供电压vdd。放大器140包括联接到第一中间节点118的正输入端和联接到第二中间节点126的负输入端。放大器140还包括联接到vout的输出端。在某些实施方式中,放大器140包括多个金属氧化物半导体场效应晶体管(mosfet),使得放大器140温度稳定且辐射稳定。
19.在操作期间,分别基于值r1和r以及值r2和rref通过第一支路112和第二支路120对vout进行分压。电压vb出现在第一中间节点118处并且电压va出现在第二中间节点126处。由第二支路120形成的分压器是相对线性的,即,va相对于vout是线性的。在某些实施方式中,例如在pvr电路中,由第一支路112形成的分压器优选地是基于电阻器116的实现及其值r基本上非线性的,即,vb相对于vout基本上是非线性的。这种布置使得pvr电路输出对电阻值r1、r2和rref的变化不太敏感。在本文描述的桥接电路的其他实施方式中,基于电阻器116的实现,由第一支路112形成的分压器优选地更加线性(例如,仅略微非线性)以在相对电阻值r1、r2和rref例如由于机械应力而相对于彼此偏移时产生vout的更大和更突然的灵敏度。
20.放大器140作为线性高增益误差放大器操作并产生vout,其被反馈到支路,用作桥接电路110的自参考。使用放大器140的桥接电路110的自参考基本上消除了电源依赖性并且一旦经由启动电路(未示出)施加启动电压就提供闭环收敛。该启动电路例如通过在通电时升高第二中间节点126处的电压va来激活回路。放大器140由很大程度上未调节的电压源供电并且可以实现至少100db的电源抑制(psr)。此外,放大器140在闭环的前向路径中操作,这降低和/或最小化其自身的偏移的影响,例如,相对于温度和辐射对桥的稳定性的影响。
21.在应力传感器电路的一个实施方式中,电阻器116的值r(r=1/cf)保持准常数。这是通过将频率f调谐到一个恒定值、电容c调谐到一个恒定值并依赖于寄生元件(例如形成开关电容器等效电阻器116的半导体开关的结电容器,如在美国专利号10,704,969号中示
出的)来实现的,以提供桥的中间节点的平衡,随后是整个电路(包括其输出(vout))的平衡。以此方式,应力传感器电路100对r1、r2或它们之间的差值的变化相对更敏感。当这些值中的任何一个发生变化时,vout会经历从高输出到低输出的相对突然变化(例如,从设置为“1”的高输出到设置为“0”的低输出)。在某些情况下,可能难以将电阻器r调谐到所需的初始状态,从而使应力传感器电路100具有最佳灵敏度。此外,各种环境因素(例如温度、老化、电源和频率)在应力传感器电路100的初始化时间与从中读出的时间之间也会发生变化。在这种情况下,可能会发生传感器输出的错误触发或错过触发。
22.根据本公开,认识到第一支路112通过放大器140表现出至少一定程度的正反馈。具体地,当vout是高输出时,由于电阻器114与电阻器116之间的分压,该电压输出导致放大器140的正端子处相应更高的电压,反之亦然。在示例性实施方式中,放大器140响应于值r1或r2(或它们之间的差值)的变化而表现出从高输出到低输出的陡峭的电压输出偏移。在图2中利用电压输出曲线200以图形方式描绘出了该电压输出偏移。因此进一步认识到,通过改变桥接电路110的电阻元件之一的电阻值(具体地,电阻器124的值rref),vout可以被驱动以在高输出与低输出之间以及低输出与高输出之间进行触发或切换。正反馈行为的结果也是传感器环路的滞后性质(例如,环绕放大器140的第一支路112在功能上等效于可调滞后比较器或可调施密特触发器),其表现出相反的输出触发阈值(在向上和向下电阻值扫掠期间),它们不是同时发生的,而是在电阻元件的两个不同值变化时发生:特别是电阻器124的值rref。图2用两个不同的触发阈值重复:一次用于向上摆动的电阻斜坡刺激,一次用于向下摆动的电阻斜坡刺激(也参见图3,如本文进一步描述的)。
23.如本文进一步描述的,通过在包括桥接电路110的触发阈值的一个值范围之间改变rref,同时所有其他元件保持不变并且环境状况保持与实际一样均匀,可以引发电压输出的触发,并且因此可以很容易地识别这些触发阈值。通过在递增和递减扫掠中迭代地驱动rref通过这个值范围,可以获得rref的值(或其驱动参数)的统计分布,在该值处发生vout的输出电平触发(从高输出到低输出,以及从低输出到高输出)。从该统计分布,可以执行平均,使得系统具有平均技术已知的读出稳定性和噪声过滤的优点。特别是,可以重复导致vout切换的离散rref值的向上和向下数字“扫掠”,以积累更多关于传感器转换点精确位置的统计置信度,即使存在随机噪声也是如此。
24.rref迭代地(i)从rref的最小值增大到rref的最大值,通过高触发阈值,在该阈值下,电压vout从高输出切换到低输出,以及rref迭代地(ii)从rref的最大值减小到最小值,通过低触发阈值,在该阈值下,电压vout从低输出切换到高输出。如本文进一步描述的,图3所示的曲线图300中示出了vout对rref变化的滞后差分电压响应。横轴为电阻(例如rref的值),纵轴为电压(例如电压输出vout)。具体地,通过改变rref,vout在高输出(vref+,例如“1”)与低输出(vref-,例如“0”)之间选择性地切换。当rref从最小值驱动到最大值时,vout穿过(traverse)输出曲线302,并且滞后比较器差分输入按比例从β
·
vref-变化到β
·
vref+。当rref达到高触发阈值时(例如,在306处),输出曲线302反映vout从vref+到vref-的转变。同样,当rref从最大值驱动到最小值时,vout穿过输出曲线304,并且滞后比较器差分输入按比例从β
·
vref+变回β
·
vref-。当rref达到低触发阈值时(例如,在308处),输出曲线304反映vout从vref-到vref+的转变。在该实施方式中,系数β=r(vref)/[r1+r(vref)],其中,如上所述,r由时钟频率f和固定电容c确定。此外,rref的最大值和最小值是预先确定
的,并且分别选择在高低触发阈值和低触发阈值之上和之下(例如,相差能够区分实际阈值和噪声的一些预定义余量)。
[0025]
在示例性实施方式中,电阻器124被实现为数控电位器或r-dac,并且在本文中可以被称为“r-dac 124”。r-dac 124使用数字代码(也称为数字“字”)来改变值rref,每个数字代码代表唯一的电阻值(例如,串联应用的内部电阻器的组合)。在示例性实施方式中,r-dac 124容纳至少8位长的数字字。在一个特定实施方式中,r-dac 124包括具有8位接口的2.5kω的数字电位器,其提供2.5kω/256=9.8ω每lsb(最低有效位)的分辨率,这转变为桥接电路110的等效感测分辨率。根据该数据,可以计算等效的最小可检测应力量(例如,表示为以kpa为单位的压力)。
[0026]
在一些实施方式中,r-dac 124可由诸如微控制器、微处理器、dsp、fpga等的数字设备150经由接口控制。数字设备150以能够在数字设备140与r-dac 124之间进行通信的方式联接到r-dac 124。数字设备150包括适于控制r-dac 124(例如,用于存储r-dac 124用来改变值rref的数字字)的数字存储寄存器。附加地或替代地,数字设备150从r-dac 124读取并记录控制rref的每个数字字。此外,数字设备150在放大器140的输出节点处读取vout。因此,数字设备150被配置为读取并记录数字字,其被提供给控制rref(相当于rref的值)的r-dac 124,在该值处vout从高输出(例如,1)切换到低输出(例如,0),以及从低输出切换到高输出。当传感器的数字输出电压被触发时,数字设备150将这些rref的值识别为提供给r-dac 124的相应数字字,并且将这些rref值分别记录为高触发阈值和低触发阈值。
[0027]
值得注意的是,如曲线图300所示,从高输出到低输出以及从低输出到高输出的vout的特征响应是模拟状态,但它们足够突然以致于可被数字设备150直接区分开和读取。因此,如上所述,vout可以被认为在功能上等同于数字输出。该数字输出是使用桥接电路110直接获得的,无需任何信号预处理,也无需任何额外的比较器。因此,本公开的所得桥接电路110可以表征为包括数字输入(例如,r-dac 124所使用的数字字)和数字输出(例如,由数字设备150直接读取的vout电平)。
[0028]
应该容易理解,高电压值和低电压值(虽然通常称为高或“1”输出和低或“0”输出)取决于桥接电路110的特定结构和其中的各种电阻元件的值以及放大器140的特性。例如,在一个特定实施方式中,高输出在1.0v到1.2v之间,而低输出在0.2v到0.4v之间。然而,本公开被适当的概括为提供高分辨率的vout,使得高输出与低输出之间的差异由于它们之间(例如,在rref的触发阈值处)偏移的突然性而易于区分。此外,考虑到其基本数字特性,桥接电路110表现出相对高的抗噪性。
[0029]
当在数字设备150处检测到vout的转变时,值rref(其可以由发送到r-dac 124以控制值rref的数字字表示)受热噪声和其他效应的影响,这些效应在本质上是随机的,可以被解释为固有的“抖动(dither)”。这种抖动可以有利地用于增加应力传感器电路100的分辨率。在一些实施方式中,在应力传感器电路100的操作期间故意引入人工(例如,数字)抖动。在一些这样的实施方式中,该数字抖动以经由prng(伪随机数发生器)电路(未示出)生成的随机二进制噪声的形式引入。因为vout的过渡值每个都是dc常数值,并且观察变量自然是缓慢的,因此可以对这种人工噪声进行简单的低通滤波(例如,使用非常长的平均),从而拒绝大部分噪声并隔离出感兴趣的值。在一个特定实施方式中,以与电阻器rref并联或串联的数字电位器的形式引入了精细抖动。这个额外的数字电位器由一个随机数字字调
制,该字将触发阈值的范围扩大到r-dac 124原始数字分辨率的1lsb以上。结合平均技术,该方法有助于识别精确的触发阈值rref(由提供给r-dac 124的唯一数字字表示)。
[0030]
认识到,这种用于有效数字化应力传感器电路100的方法与先前的应力传感器一样,有些易受电路老化和环境状况(例如,温度)变化的影响。这些变化可能会随机或系统地影响触发阈值rref。在一些实施方式中,例如,由于时钟频率f、施加的电压vdd和/或温度的变化,触发阈值rref偏移多达4至6lsb。这些偏移可能导致应力传感器电路100的假阳性触发,或者,可能显著到足以掩盖意在由应力传感器电路100检测的机械应力的变化。
[0031]
根据本公开的有利实现是,rref的高触发阈值和低触发阈值都类似地受到这些状况的影响。因此,通过记录rref的高触发阈值和低触发阈值的数字字表示,数字设备150被配置为计算它们之间的差值。即,数字设备150在向上rref扫掠期间记录高触发阈值,因为当数字设备150检测到vout从高输出到低输出的转变时,rref在从最小值到最大值的向上计数中增大。同样,数字设备150在随后的向下rref扫掠期间记录低触发阈值,因为当数字设备150检测到vout从低输出到高输出的转变时,rref在从最大值到最小值的向下计数中减小。数字设备150计算高触发阈值与低触发阈值之间的差值,称为差分读数。在一个示例性实施方式中,与上述绝对触发阈值的较大偏移相反,差分读数响应于时钟频率f、施加的电压vdd和/或温度的大范围变化仅偏移达2lsb。
[0032]
因此,差分读数在绝对触发阈值上表现出更高的稳定性和可靠性。进而,促进了应力传感器电路100的更精确操作,同时降低了对环境/老化状况的敏感性。上文关于rref的绝对触发阈值所描述的平均的相同好处同样可以应用于差分读数。尤其是,向上和向下扫掠可以迭代任意次数,同时引入噪声和/或其他参数变化或利用系统中自然发生的噪声/变化,以增加传感器的差分读数的分辨率。
[0033]
因此,应力传感器电路100是高灵敏度“电阻数字转换器(rdc)”电路,能够以大得多的分辨率测量电阻器114和122的运动(或它们之间的差值)。
[0034]
图4是测量基底102上的机械应力的方法400的一个实施方式的流程图,在基底102上设置有桥接电路110。向联接在输出节点vout与接地节点gnd之间的桥接电路110提供410电压源。该桥接电路110包括电阻器114(具有值r1)、可调电阻器116(具有值r)、电阻器122(具有值r2)和可变基准电阻器124(具有可变值rref)。桥接电路的平衡点和输出节点电压根据基底102所承受的机械应力而变化。
[0035]
通过使可变基准电阻器扫过多个离散rref值来改变420值rref,并且读取430输出节点处的数字电压输出,其中,该数字输出根据基底102上的机械应力和rref的值而变化。
[0036]
方法400可以包括附加的、更少的和/或替代的步骤。例如,图5描绘了测量基底102上的机械应力的另一方法500的另一实施方式的流程图,包括如上所述的步骤410、420和430以及附加步骤。尤其是,通过在从第一值到第二值的向上扫掠中增大510值rref(例如,通过r-dac 124)来改变(420)值rref。各个值可以包括多位数字字(例如,8位或更大的数字字)。通过检测520(例如,通过数字设备150)在向上扫掠期间数字电压输出从高电平到低电平的第一转变,读取(430)输出节点处的数字电压。将与检测到的第一转变相对应的值rref的多位数字字表示(例如,由数字设备150)记录530为高触发阈值。
[0037]
此后,通过在从第二值到第一值的向下扫掠中减小540值rref(例如,通过r-dac124)来改变(420)值rref。通过检测550(例如,通过数字设备150)在向下扫掠期间数字
电压输出从低电平到高电平的第二转变,读取(430)输出节点处的数字电压。将与检测到的第二转变相对应的值rref的多位数字字表示(例如,由数字设备150)记录560为低触发阈值。
[0038]
将高触发阈值与低触发阈值之间的差值(例如,由数字设备150)记录570为差分读数。如本文所述,该方法500可以重复多次。
[0039]
在一个实施方式中,方法400或方法500包括在应力传感器电路的任一或所有步骤期间向应力传感器电路引入人工噪声,并记录该人工噪声对差分读数的影响(例如,在适当滤波之后)。
[0040]
本文描述的方法、系统和设备的示例性技术效果包括以下中的至少一个:(a)相对于已知的感测电路提高了应力传感器电路的灵敏度和稳定性;(b)应用平均的益处来提高传感器数字读数的分辨率;(c)在不需要adc的情况下实现这些益处。
[0041]
本文描述的系统和方法不限于本文描述的特定实施方式,而是,系统的组件和/或方法的步骤可以相对于本文描述的其他组件和/或步骤独立地或单独地使用。
[0042]
尽管本公开的各种实施方式的具体特征可能是在一些附图中而不是在其他附图中被示出,但这仅仅是为了方便起见。根据本公开的原理,可以结合任何其他附图的任何特征来引用和/或要求保护附图的任何特征。
[0043]
此外,本公开还包括根据以下条款的示例:
[0044]
条款1.一种能够工作以产生数字电压输出的应力传感器电路,该应力传感器电路包括:
[0045]
被配置为承受机械应力的基底;以及
[0046]
设置在基底上并联接在输出节点与接地节点之间的桥接电路,该桥接电路包括:
[0047]
第一支路,所述第一支路具有值为r1的第一电阻器,其中,第一电阻器在第一中间节点处联接到值为r的可调电阻器;
[0048]
第二支路,所述第二支路具有值为r2的第二电阻器,其中,第二电阻器在第二中间节点处联接到值为rref的可变基准电阻器,并且其中,该可变基准电阻器被配置为扫过多个离散值rref;以及
[0049]
放大器,该放大器具有联接到第一中间节点的正输入端和联接到第二中间节点的负输入端,其中,该放大器被配置为根据施加到基底的机械应力和值rref在输出节点处产生数字电压输出。
[0050]
条款2.根据条款1所述的应力传感器电路,其中,所述可变基准电阻器是数字电位器或r-dac,并且被配置为数字地控制值rref。
[0051]
条款3.根据条款2所述的应力传感器电路,其中,所述可变基准电阻器具有至少8位的分辨率。
[0052]
条款4.根据条款1所述的应力传感器电路,所述应力传感器电路还包括数字设备,该数字设备联接到所述输出节点并被配置为读取该输出节点处的数字电压输出。
[0053]
条款5.根据条款4所述的应力传感器电路,其中,所述可变基准电阻器是r-dac,该r-dac被配置为按从第一值到第二值的向上扫掠和随后从第二值到第一值的向下扫掠来数字地控制值rref。
[0054]
条款6.根据条款5所述的应力传感器电路,其中,所述数字设备还被配置为检测在
向上扫掠期间数字电压输出从高电平到低电平的第一转变以及在向下扫掠期间数字电压输出从低电平到高电平的第二转变。
[0055]
条款7.根据条款6所述的应力传感器电路,其中,所述数字设备还被配置为将与检测到的第一转变相对应的值rref的数字字表示记录为高触发阈值,并且将与检测到的第二转变相对应的值rref的数字字表示记录为低触发阈值。
[0056]
条款8.根据条款7所述的应力传感器电路,其中,所述数字设备还被配置为将所述高触发阈值与所述低触发阈值之间的差值记录为差分读数。
[0057]
条款9.根据条款8所述的应力传感器电路,其中,所述r-dac还被配置为按多次迭代的向上扫掠和向下扫掠来数字地控制值rref,并且其中,所述数字设备还被配置为记录多个迭代的向上扫掠和向下扫掠中的每对向上扫掠和向下扫掠的相应差分读数。
[0058]
条款10.根据条款7所述的应力传感器电路,其中,第一值rref大于或等于高触发阈值并且第二值rref小于或等于低触发阈值。
[0059]
条款11.根据条款5所述的应力传感器电路,其中,所述数字设备包括被配置为控制所述r-dac以确定rref的每个值的数字存储寄存器。
[0060]
条款12.根据条款5所述的应力传感器电路,其中,所述数字设备包括微控制器、微处理器或fpga。
[0061]
条款13.一种测量基底上的机械应力的方法,该方法包括以下步骤:
[0062]
向联接在输出节点与地之间的桥接电路提供电压源,该桥接电路包括:
[0063]
第一支路,所述第一支路具有值为r1的第一电阻器,其中,所述第一电阻器联接到值为r的可调电阻器;以及
[0064]
具有值为r2的第二电阻器的第二支路,其中,所述第二电阻器联接到值为rref的可变基准电阻器;
[0065]
通过使所述可变基准电阻器扫过多个离散值rref来改变值rref;以及
[0066]
读取所述输出节点处的数字电压输出,该数字电压输出根据机械应力和值rref而变化。
[0067]
条款14.根据条款13所述的方法,其中,改变值rref的步骤包括:
[0068]
在从第一值到第二值的向上扫掠中增大值rref;以及
[0069]
在随后的从第二值到第一值的向下扫掠中减小值rref。
[0070]
条款15.根据条款14所述的方法,其中,读取数字电压输出的步骤包括:
[0071]
检测在向上扫掠期间数字电压输出从高电平到低电平的第一转变;以及
[0072]
检测在向下扫掠期间数字电压输出从低电平到高电平的第二转变。
[0073]
条款16.根据条款15所述的方法,该方法还包括以下步骤:
[0074]
将与检测到的第一转变相对应的值rref的数字字表示记录为高触发阈值;以及
[0075]
将与检测到的第二转变相对应的值rref的数字字表示记录为低触发阈值。
[0076]
条款17.根据条款16所述的方法,该方法还包括将高触发阈值与低触发阈值之间的差值记录为差分读数。
[0077]
条款18.根据条款17所述的方法,该方法还包括以下步骤:
[0078]
将人工噪声引入桥接电路;以及
[0079]
记录该人工噪声对所述差分读数的影响。
[0080]
条款19.根据条款17所述的方法,该方法还包括以下步骤:
[0081]
在多个迭代的向上扫掠和向下扫掠中增大和减小值rref;以及
[0082]
记录多个迭代的向上扫掠和向下扫掠中的每对向上扫掠和向下扫掠的相应差分读数。
[0083]
条款20.根据条款13所述的方法,该方法还包括以下步骤:在可变基准电阻器与输出节点之间联接数字设备,其中,该数字设备被配置为执行所述改变的步骤和所述读取的步骤。
[0084]
条款21.一种应力传感器系统,所述应力传感器系统包括:
[0085]
基底,所述基底被配置为承受机械应力;
[0086]
桥接电路,所述桥接电路设置在基底上并联接在输出节点与接地节点之间,该桥接电路包括:
[0087]
第一支路,所述第一支路具有值为r1的第一电阻器,其中,该第一电阻器在第一中间节点处联接到值为r的可调电阻器;
[0088]
第二支路,所述第二支路具有值为r2的第二电阻器,其中,该第二电阻器在第二中间节点处联接到值为rref的可变基准电阻器;以及
[0089]
放大器,所述放大器具有联接到第一中间节点的正输入端和联接到第二中间节点的负输入端,其中,该放大器被配置为根据施加到基底的机械应力和值rref在输出节点处产生数字电压输出;以及
[0090]
微处理器,该微处理器联接到可变基准电阻器和输出节点,其中,该微处理器被配置为:
[0091]
控制可变基准电阻扫过多个离散值rref;并且
[0092]
读取输出节点处的数字电压输出。
[0093]
条款22.根据条款21所述的应力传感器系统,其中,所述微处理器还被配置为:
[0094]
按从第一值到第二值的向上扫掠和随后从第二值到第一值的向下扫掠来数字地控制值rref;并且
[0095]
检测在向上扫掠期间数字电压输出从高电平到低电平的第一转变,以及在向下扫掠期间数字电压输出从低电平到高电平的第二转变。
[0096]
条款23.根据条款22所述的应力传感器系统,其中,所述微处理器还被配置为:
[0097]
将与检测到的第一转变相对应的值rref的数字字表示记录为高触发阈值,并将与检测到的第二转变相对应的值rref的数字字表示记录为低触发阈值;并且
[0098]
将高触发阈值与低触发阈值之间的差值记录为差分读数。
[0099]
该书面描述使用示例来公开包括最佳模式的各种实施方式,以使本领域技术人员能够实践那些实施方式,包括制造和使用任何设备或系统以及执行任何合并的方法。可专利范围由权利要求限定,并且可以包括本领域技术人员能想到的其他示例。如果这些其他示例具有与权利要求的字面语言没有区别的结构要素,或者如果它们包括与权利要求的字面语言没有实质区别的等效结构要素,则这些其他示例旨在落入权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1