一种人工汗液驱动的自收缩智能装置和制动器的制作方法
本技术涉及高分子材料,尤其涉及人工汗液驱动的自收缩智能装置和制动器。
背景技术:
1、运动、手术以及战争等均可导致不同程度的肌肉损伤,可分为拉伤、挫伤和撕裂伤三种类型,一般采用保守治疗或手术治疗。保守治疗即price(保护、休息、冰敷、加压、抬高),作为肌肉损伤的初期治疗。手术治疗是肌腱和韧带相关损伤的主要治疗方法,但是术后并发症高发,包括再次断裂、肌肉萎缩、功能下降和肌腱-骨界面重建不良等。新的基因和细胞疗法,如干细胞疗法正在出现,但在真正用于临床还需要更多的研究。另外,恢复期的并发症(粘连形成、肌肉萎缩等)也是肌肉损伤修复失败的主要原因。肌肉损伤约15~60天的周期内活动受限或需长期卧床疗养,会引起肌肉废用性萎缩,并伴随整体新陈代谢的下降。肌肉萎缩不仅仅是肌肉的损失,而且伴随着肌纤维大小和数量的丧失,会对行动能力、独立性和生活质量产生严重影响。在预防和治疗肌肉萎缩的治疗手段中,主要有电疗、按摩和锻炼等方法。但这些方法都存在着不可控的因素,按摩和锻炼具有不可控性并且易造成二次损伤,电刺激也可引起不同程度的炎症反应。所以,受损肌肉的修复过程中迫切需要重视肌肉废用后减缓肌肉萎缩的程度或预防肌肉萎缩。
2、在肌肉修复过程中,适量的运动可以促进肌肉再生并预防肌肉萎缩。当智能响应软材料应用于生物体内时,不同响应的软材料的作用下对生物体会有不同影响。例如,光响应智能材料一般需要紫外光激发,那将对人体产生一定程度的伤害;软材料通过化学试剂产生收缩效应时,有机溶剂可以对身体产生永久的伤害;如果是压力响应智能软材料,那么人体施加压力的程度将不可控;如果是热响应智能软材料,那么在人体中的温度将会很难控制。但电响应软材料将有诸多优势:电源易获取、电压/电流大小可控、弯曲程度可控、弯曲时间可控以及可重复弯曲。
3、作为电响应的智能软材料,在低电压条件下,采用更清洁得能源持续驱动的技术被广泛关注。而在生物系统中可用的能量来源主要是肌肉的缓慢拉伸、生物流体和血液的缓慢流动,以及可能穿透深层组织的红外光和声波。采用一定得技术手段收集生物能源,并将其转化为可使用电源已经引起了很多关注;如摩擦电纳米发电机、压电纳米发电机、太阳能采集器、热能采集器和生物燃料电池,目前正在临床前研究中进行评估。因此,这些战略将人体或其周围环境的能量转化为电能,以提供可持续的能源,可被定义为自供电技术。这些技术有可能被用来设计下一代的工程变更单。
技术实现思路
1、本实用新型解决的技术问题在于提供一种低电压响应的人工汗液驱动的自收缩智能装置,该自收缩智能装置可将汗液转化为电能,且具有低电压响应性。
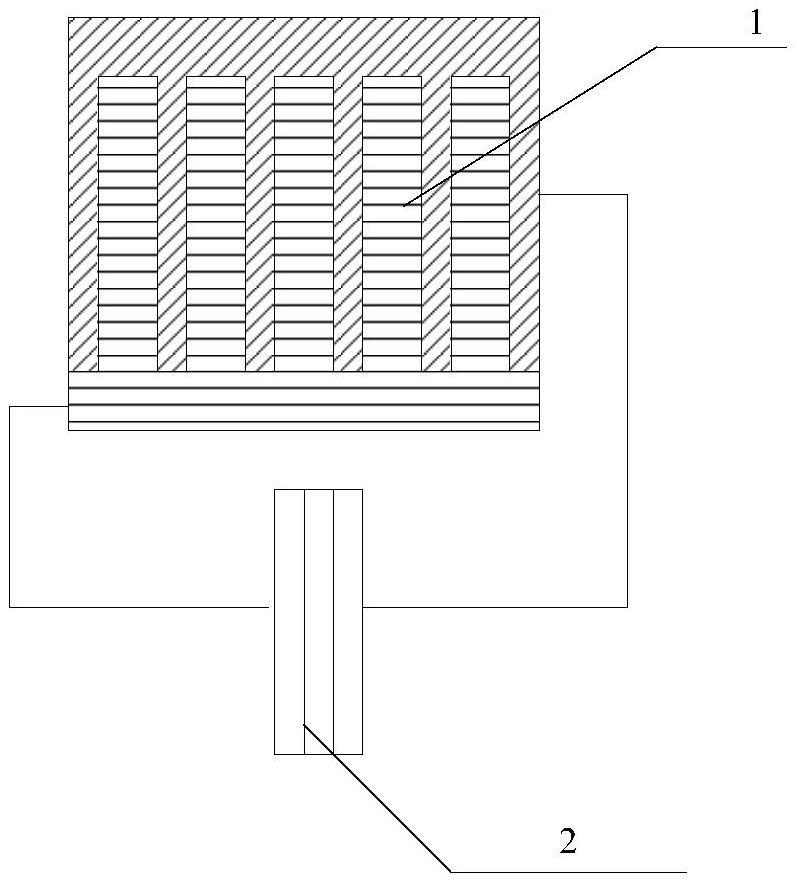
2、有鉴于此,本申请提供了一种人工汗液驱动的自收缩智能装置,包括制动器和与制动器连接的汗液集能装置;
3、所述制动器包括依次叠加设置的第一pedot:pss导电膜、可收缩薄膜和第二pedot:pss导电膜;
4、所述汗液集能装置由叠加设置的叉指电极和具有吸水性能材料组成;所述叉指电极由正极和负极复合而成。
5、优选的,所述正极为第一金属层,所述负极为第二金属层,所述第二金属层的活泼性高于第一金属层。
6、优选的,所述第一金属层的厚度为0.01~0.1mm,所述第二金属层的厚度为0.01~0.1mm。
7、优选的,所述正极的表面复合有1~10wt%的碳材料,所述碳材料选自单壁碳纳米管和多壁碳纳米管中的一种或两种。
8、优选的,所述连接的方式为导线连接。
9、优选的,第一pedot:pss导电膜和所述第二pedot:pss导电膜的厚度分别为10~20μm。
10、优选的,所述具有吸水性能材料的厚度为0.3~0.5mm。
11、本申请还提供了一种制动器,包括依次叠加设置的第一pedot:pss导电膜、可收缩薄膜和第二pedot:pss导电膜。
12、本申请提供了一种具有低电压响应人工汗液驱动的自收缩智能装置,其包括制动器和汗液集能装置,采用汗液集能装置收集生物能源-汗液,并将其转化为电能,为电响应智能软材料提供能量使其产生一定的自收缩能力,摆脱了传统电源供电的方法,并且汗液集能装置具有设计为可穿戴等便携式的潜力。本实用新型从能源收集到智能软材料自收缩,具有趋于一体化和结构小型化的发展前景,最终可运用到组织修复的方向。
技术特征:
1.一种人工汗液驱动的自收缩智能装置,其特征在于,包括制动器和与制动器连接的汗液集能装置;
2.根据权利要求1所述的装置,其特征在于,所述正极为第一金属层,所述负极为第二金属层,所述第二金属层的活泼性高于第一金属层。
3.根据权利要求2所述的装置,其特征在于,所述第一金属层的厚度为0.01~0.1mm,所述第二金属层的厚度为0.01~0.1mm。
4.根据权利要求1所述的装置,其特征在于,所述连接的方式为导线连接。
5.根据权利要求1所述的装置,其特征在于,第一pedot:pss导电膜和所述第二pedot:pss导电膜的厚度分别为10~20μm。
6.根据权利要求1所述的装置,其特征在于,所述具有吸水性能材料的厚度为0.3~0.5mm。
7.一种制动器,其特征在于,包括依次叠加设置的第一pedot:pss导电膜、可收缩薄膜和第二pedot:pss导电膜。
技术总结
本技术提供了一种人工汗液驱动的自收缩智能装置,包括制动器和与制动器连接的汗液集能装置;所述制动器包括依次叠加设置的第一PEDOT:PSS导电膜、可收缩薄膜和第二PEDOT:PSS导电膜;所述汗液集能装置叉指电极和具有吸水性能材料组成;所述叉指电极由正极和负极复合而成。本技术还提供了一种制动器。本技术采用汗液集能装置收集生物能源‑汗液,并将其转化为电能,为电响应智能软材料提供能量使其产生一定的自收缩能力,摆脱了传统电源供电的方法,并且汗液集能装置具有设计为可穿戴等便携式的潜力。
技术研发人员:刘颖,陈延东,陈春英,赵宇亮
受保护的技术使用者:广东粤港澳大湾区国家纳米科技创新研究院
技术研发日:20211029
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!