一种机器人用充电装置的制作方法
1.本实用新型涉及一种机器人用的充电装置。
背景技术:
2.随着科技的进步,机器人变的逐渐智能化,可通过获取光学图像信息或者通过声波进行探测,规避障碍物和规划出合理的移动路线;亦可在需要充电时,自动返航到供电设施处进行充电,在电量充满时,自动脱离供电设施而结束充电。
3.机器人实现上述功能均有成熟的设计方案,针对机器人返航充电过程中,机器人上的公头和充电设施上的母头之间需要进行反复校正对位的问题,目前,大多数的解决方案都是从导航和定位精度上着手进行改进,而很少从公头和母头本身机械结构上提出新的解决方案;此外,公头和母头之间的反复拔插,容易导致插孔与公头上的触头之间反复磨损,降低连接的可靠性。
技术实现要素:
4.本实用新型的目的在于克服背景技术的缺点,提供一种机器人用充电装置。
5.本实用新型的实施例通过以下技术方案实现:
6.一种机器人用充电装置,包括设于机器人上的公头及设于供电设施上的母头,所述公头上设有圆台状或圆锥状的触头;
7.所述母头包括弹性件及对立设置的两组用于插接所述触头的插接体;
8.至少一组插接体被配置为可相对于另一组插接体在任意一组插接体的对立面的法线方向上滑动;
9.孔径与所述触头的轮廓匹配的插孔被一分为二地设置在两组所述插接体上;所述弹性件被配置为驱动该组可移动的插接体进行移动,使两组插接体之间的间隙缩小,插孔夹紧所述触头。
10.可选地,所述两组插接体中,第一组插接体上设置有沿插接体的对立面的法向方向设置的导向件,第二组插接体可滑动地设置在所述导向件上;
11.所述弹性件连接在两组所述插接体之间。
12.可选地,所述母头还包括用于固定任意一组插接体的基底,基底上设有沿被固定的插接体的对立面的法线方向设置的导向件,另一组插接体可滑动地设置在所述导向件上。
13.可选地,所述弹性件连接在两组插接体之间。
14.可选地,所述弹性件连接在基底与可在导轨上滑动的插接体之间。
15.在另一个方案中,所述机器人用充电装置包括设于供电设施上的公头及设于机器人上的母头,所述公头上设有圆台状或圆锥状的触头;
16.所述母头包括弹性件及对立设置的两组用于插接所述触头的插接体;
17.至少一组插接体被配置为可相对于另一组插接体在任意一组插接体的对立面的
法线方向上滑动;
18.孔径与所述触头的轮廓匹配的插孔被一分为二地设置在两组所述插接体上;所述弹性件被配置为驱动该组可移动的插接体进行移动,使两组插接体之间的间隙缩小,插孔夹紧所述触头。
19.可选地,所述两组插接体中,第一组插接体上设置有沿插接体的对立面的法向方向设置的导向件,第二组插接体可滑动地设置在所述导向件上;
20.所述弹性件连接在两组所述插接体之间。
21.可选地,所述母头还包括用于固定任意一组插接体的基底,基底上设有沿被固定的插接体的对立面的法线方向设置的导向件,另一组插接体可滑动地设置在所述导向件上。
22.可选地,所述弹性件连接在两组插接体之间。
23.可选地,所述弹性件连接在基底与可在导轨上滑动的插接体之间。
24.本实用新型实施例的技术方案至少具有如下优点和有益效果:
25.本实用新型的机器人用充电装置中,公头上的触头呈圆台或圆锥状,母头上的插孔与之匹配,在机器人充电对位过程中,触头以及插孔的锥形结构可起到修正对位精度的作用,显著提高公头和母头的对位精度;此外,插孔一分为二地设置在两组插接体上,两组插接体之间的间隙可变,触头插入插孔后,弹性件驱动两组插接体靠近使插孔收缩而压紧触头,可提高对触头的夹紧程度,且可对插孔及触头的磨损进行补偿,提高充电的稳定性。
附图说明
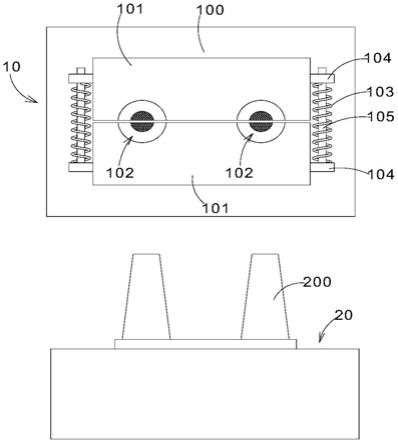
26.图1为本实用新型的机器人用充电装置的结构示意图;
27.图标:10-母头,100-基底,102-插接体,102-插孔,103-弹性件,104-连接座,105-导向柱,20-公头,200-触头。
具体实施方式
28.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
29.参照图1,本实用新型提供一种机器人用充电装置,包括设于机器人上的公头20及设于供电设施上的母头10,其中,供电设施包括但不限于充电桩、工业及家用充电座插座等。
30.其中,所述公头20上设有圆台状或圆锥状的触头200,即触头200呈绕一轴线旋转而成的回转体结构,且触头200上相对的两端中,端面轮廓一大一小。
31.所述母头10包括弹性件103及对立设置的两组用于插接所述触头200的插接体101,弹性件103可为弹性绳、弹性带、金属弹片或者弹簧。
32.本实用新型的机器人用充电装置中,至少一组插接体101被配置为可相对于另一组插接体101在任意一组插接体101的对立面的法线方向上滑动;孔径与所述触头200的轮廓匹配的插孔102被一分为二地设置在两组所述插接体101上;所述弹性件103被配置为驱
动该组可移动的插接体101进行移动,使两组插接体101之间的间隙缩小以夹紧所述触头200。
33.通常,公头20上设置有两组触头200,母头10上设有两组插孔102,以具体一组触头200和一组插孔102为例,其包括但不限于如下几种具体实施例:
34.实施例一:
35.所述母头10内的两组插接体101中,第一组插接体101上设置有沿任意一组插接体101的对立面的法向方向设置的导向件(由于两组插接体101的对立面平行,实质上两组插接体101的对立面的法线方向相同),第二组插接体101可滑动地设置在所述导向件上,只需将任意一组插接体101固定到充电设施上即可,所述弹性件103连接在两组所述插接体101之间,以通过弹性件103带动两组插接体之间的收缩靠近。
36.导向件可选择导轨、导向轴或者导向槽等结构。
37.实施例二:
38.所述母头10还包括用于固定任意一组插接体101的基底100,基底100固定到充电设施上,一组插接体101在基底100上的位置固定不动,所述基底100上设有沿被固定的插接体101的对立面的法线方向设置的导向件,另一组插接体101可滑动地设置在所述导向件上。
39.此时,所述弹性件103可连接在两组插接体101之间,或所述弹性件103连接在基底100与可在导轨上滑动的插接体101之间。
40.实施例三:
41.参照图1,所述母头10还包括用于固定任意一组插接体101的基底100,其中一组插接体101固定在基底100上,每组插接体101的两侧均设有连接座104,两组插接体101同侧的两组连接座104之间通过弹簧连接,且弹簧套设在导向柱105上。
42.实施例四:
43.所述母头10还包括基底100,两组插接体101均可相对滑动地设置在基底100上,每组插接体101与基底100之间均连接有弹性件103,通过基底100与插接体101之间的弹性件103分别驱动两组连机体101相向滑动靠拢。
44.实施例五:
45.与实施例一至四的差别在于,将母头10设置在机器人上,将公头20设置在充电设施上,母头10和公头20的具体结构与实施例一至四相同,该结构可用于一些可将充电设施上的公头20的触头200暴露在外的特定环境中。
46.此外,在一些实施例中,上述机器人用充电装置,设置在机器人上的公头10或者母头20内可内置现有的充电路径规功能模块以及充电完成自动脱离功能模块,增加充电装置功能的丰富性。
47.上述实施例中的机器人用充电装置可应用在各种机器人领域,如扫地机器人、巡检机器人以及公厕清扫机器人等,减少充电过程中人为干预和接触的频率,提高安全性和卫生程度。
48.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1