半导体工艺方法和半导体工艺腔室与流程
1.本发明涉及半导体工艺领域,具体地,涉及一种半导体工艺方法和一种用于实现该半导体工艺方法的半导体工艺腔室。
背景技术:
2.随着集成电路制造工艺特征尺寸的不断缩小以及工艺复杂程度的急剧增加,更先进的技术节点对工艺的准确性提出了更加严格的要求。干法刻蚀(dry clean)与传统的湿法清洗(wet clean)相比,采用气体代替化学试剂与晶圆表面薄膜发生化学反应,通过工艺集成控制达到精确、高效孔洞底部去除、无衬底损伤(无等离子体)、无再氧化的效果,成为广泛应用在半导体工艺领域的刻蚀技术。
3.在干法刻蚀工艺过程中,工艺气体通常通过真空管路从半导体工艺腔室的顶部进入到腔体内部,经过匀流装置(showerhead)后均匀地与基座上的晶圆(wafer)表面接触并与之发生化学反应,从而达到刻蚀目的。在刻蚀工艺结束后,由顶针(pin)将晶圆顶升至最高工位,通过加热的匀流装置对晶圆进行退火,以通过高温促使反应产物充分挥发并被干泵抽走。
4.在整个刻蚀工艺过程中,匀流装置喷出的气体到晶圆之间的距离,决定着气体滞留在腔室的体积大小,从而直接影响着气体与薄膜之间的反应程度,对工艺结果有着至关重要的影响;并且顶针顶起晶圆进行退火时,晶圆与加热的匀流装置之间的距离同样决定着退火程度的不同。
5.然而,现有技术中常通过人工检测和计算的方式来确定晶圆进行工艺和退火的位置,导致晶圆高度的精确性较低,晶圆刻蚀效果及退火工艺效果的可控性较差。
技术实现要素:
6.本发明旨在提供一种半导体工艺方法和一种用于实现该半导体工艺方法的半导体工艺腔室,该半导体工艺方法能够保证半导体工艺过程中晶圆位置的精确性,提高半导体工艺效果。
7.为实现上述目的,作为本发明的一个方面,提供一种半导体工艺腔室,包括腔体和设置在所述腔体中的工艺组件、承载盘、升降组件,所述工艺组件位于所述承载盘的上方,用于在半导体工艺中对所述承载盘上的晶圆进行加热和/或向所述腔体中提供工艺气体,所述升降组件用于抬起或放下所述承载盘上的晶圆,所述半导体工艺腔室还包括控制装置和设置在所述腔体底部的至少一个测距组件,所述承载盘上形成有位置与所述测距组件一一对应的至少一个测距通孔,所述测距组件用于通过对应的所述测距通孔对所述承载盘上方的物体进行测距,所述控制装置用于控制所述测距组件对所述工艺组件进行测距,并在所述腔体中传入晶圆后,再控制所述测距组件对所述承载盘上方的所述晶圆进行测距,根据前后两次测距结果控制所述升降组件对所述晶圆进行升降,以使所述晶圆的顶面与所述工艺组件之间间隔预定距离。
8.可选地,所述测距组件固定设置在所述腔体底壁外侧的底面上,所述腔体的底壁上设置有位置与所述测距组件一一对应的至少一个观测窗,所述测距组件用于透过对应的所述观测窗并通过对应的所述测距通孔对所述承载盘上方的物体进行测距。
9.可选地,所述观测窗的材质包括石英。
10.可选地,所述腔体的底壁上设置有三个所述观测窗,各所述观测窗环绕所述腔体的轴线周向等间隔分布。
11.可选地,所述测距组件包括激光测距传感器。
12.可选地,所述控制装置包括控制模块、通讯模块、放大器和处理模块;其中,
13.所述放大器与所述激光测距传感器电连接,用于在所述控制模块的控制下开关所述激光测距传感器;
14.所述通讯模块与所述放大器电连接,用于将所述激光测距传感器检测的信号发送给所述处理模块;
15.所述处理模块用于对所述激光测距传感器检测的信号进行数据处理,并将数据处理结果发送给所述控制模块;
16.所述控制模块用于根据所述数据处理结果控制所述升降组件对所述晶圆进行升降操作。
17.作为本发明的第二个方面,提供一种半导体工艺方法,应用于前面所述的半导体工艺腔室,所述半导体工艺方法包括:
18.控制所述测距组件对所述工艺组件进行测距;
19.向所述腔体中传入晶圆,并控制所述测距组件对所述承载盘上方的所述晶圆进行测距;
20.根据前后两次测距结果控制所述升降组件对所述晶圆进行升降,以使所述晶圆的顶面与所述工艺组件之间间隔预定距离;
21.进行所述半导体工艺。
22.可选地,所述升降组件包括升降驱动部和多根顶针,所述承载盘上形成有位置与多根所述顶针一一对应的多个顶针孔,所述升降驱动部用于驱动多根所述顶针沿对应的所述顶针孔进行升降;
23.所述半导体工艺方法还包括:在向所述腔体中传入所述晶圆前,控制所述升降组件进行升降,使多根所述顶针的顶端高于所述承载盘的承载面,并将所述升降驱动部当前的进给量记录为第一进给量;
24.所述根据前后两次测距结果控制所述升降组件对所述晶圆进行升降,包括:
25.根据前后两次测距结果和所述第一进给量,将所述升降驱动部调节至第二进给量,以使所述晶圆的顶面与所述工艺组件之间间隔预定距离。
26.可选地,所述根据前后两次测距结果和所述第一进给量,将所述升降驱动部调节至第二进给量,包括:
27.确定前后两次测距结果之间的测距差值;
28.将所述第一进给量与所述测距差值相加,并减去所述预定距离以及所述晶圆的厚度,得到所述第二进给量;
29.将所述升降驱动部调节至所述第二进给量。
30.可选地,所述半导体工艺腔室包括多个所述测距组件,所述控制所述测距组件对所述工艺组件进行测距,包括:获取多个所述测距组件的多个第一测距值;
31.所述控制所述测距组件对所述承载盘上方的所述晶圆进行测距,包括:获取多个所述测距组件的多个第二测距值;
32.所述确定前后两次测距结果之间的测距差值,包括:
33.确定每个所述测距组件的所述第一测距值与所述第二测距值的差值;
34.若多个所述差值中存在两者之间的差大于预设差值,则停止所述半导体工艺;
35.若多个所述差值中任意两者之间的差均小于或等于所述预设差值,则将多个所述差值的平均值确定为所述测距差值。
36.可选地,所述半导体工艺腔室包括多个所述测距组件,所述半导体工艺方法还包括:
37.在向所述腔体中传入晶圆后,获取每个所述测距组件的测距结果;
38.若存在任一所述测距组件的测距结果超出预设范围,则停止所述半导体工艺。
39.在本发明提供的半导体工艺方法和半导体工艺腔室中,控制装置能够在向腔体中传入晶圆前控制测距组件对工艺组件进行一次测距,在向腔体中传入晶圆后再控制测距组件对晶圆进行一次测距,从而可以确定晶圆与工艺组件之间的距离,进而根据该距离确定升降组件升降晶圆的高度,使晶圆的顶面与工艺组件之间的间隔在半导体工艺中精确保持在所需的预定距离,且在该过程中,两次测距任务均由测距组件自动实现,无需通过人工操作检测距离或者引入额外标准平面进行间接测距,降低了测距误差,从而提高了确定升降组件调节量所需数据的精度,进而保证了半导体工艺过程中晶圆的顶面与工艺组件之间间隔距离的精确性,提高了半导体工艺效果。
附图说明
40.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
41.图1是利用一种现有的半导体工艺腔室进行半导体工艺时,晶圆与匀流装置之间的距离对刻蚀工艺的影响效果的示意图;
42.图2是一种现有的半导体工艺腔室的结构示意图;
43.图3是现有技术中测量调整晶圆位置的原理示意图;
44.图4是现有技术中晶圆在半导体工艺中的位置示意图;
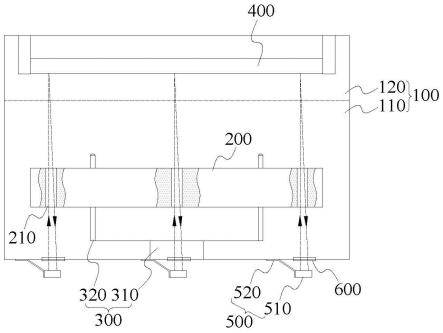
45.图5是本发明实施例提供的半导体工艺腔室的结构示意图;
46.图6是本发明实施例提供的半导体工艺腔室的一种状态的示意图;
47.图7是本发明实施例提供的半导体工艺腔室的另一种状态的示意图;
48.图8是本发明实施例提供的半导体工艺腔室中腔体底壁的结构示意图;
49.图9是本发明实施例提供的半导体工艺腔室中控制装置与测距组件之间的连接关系示意图;
50.图10是本发明实施例提供的半导体工艺腔室中控制装置与测距组件之间的连接关系示意图。
51.附图标记说明:
52.100:腔体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200:承载盘
53.210:测距通孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300:升降组件
54.310:升降驱动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320:顶针
55.400:工艺组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
500:测距组件
56.510:激光测距传感器
ꢀꢀꢀꢀꢀꢀ
520:固定支架
57.530:可编程逻辑控制器
ꢀꢀꢀꢀ
541:第一放大器
58.542:第二放大器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
543:第三放大器
59.550:通讯模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
560:工控机
60.600:观测窗
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10:晶圆
具体实施方式
61.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
62.如图1所示为利用一种现有的半导体工艺腔室进行半导体工艺时,晶圆与匀流装置之间的距离c对刻蚀工艺的影响效果的示意图,由图1可知,在晶圆与匀流装置之间的距离c为4.0mm时,刻蚀量的平均值为(埃),刻蚀均匀度(即晶圆厚度的最大值与最小值之前的差值与晶圆平均厚度之间的比值)为12.75%;而在晶圆与匀流装置之间的距离c为3.5mm时,刻蚀量的平均值为刻蚀均匀度为4.50%,可见晶圆与匀流装置之间的距离c对刻蚀效果具有重要影响。
63.然而,在现有技术中,需通过人工检测及计算的方式来确定顶针顶升晶圆的高度,使晶圆高度的精确性较低,晶圆刻蚀效果及退火工艺效果的可控性较差。如图2所示为一种现有的半导体工艺腔室的结构示意图,该半导体工艺腔室包括腔体100、和设置在腔体100中的工艺组件400、承载盘200、升降装置。承载盘200用于承载晶圆10,升降装置包括升降驱动部310和多根顶针320,升降驱动部310用于驱动多根顶针320的顶端穿过承载盘200上的顶针孔并顶起承载盘200承载面上的晶圆10。工艺组件400可以为匀流装置(showerhead),用于在刻蚀工艺中向腔体100中提供工艺气体,还用于在晶圆退火工艺中对晶圆10进行加热。
64.腔体100包括腔室本体110和腔室上盖120,腔室上盖120用于密封腔室本体110顶部的开口,工艺组件400设置在腔室上盖120上。在进行半导体工艺前,需通过人工操作确定顶针320的顶端与工艺组件400之间的距离,以便在半导体工艺中对升降驱动部310进行调节,实现将顶针320升起后晶圆10与工艺组件400之间的距离控制在工艺所需的预定距离c,具体地:
65.如图2所示,在进行半导体工艺前,先通过机械三维图测量得出工艺组件400的下表面与腔室对接面(即腔室本体110与腔室上盖120之间的对接面)之间的高度差a。然后,如图3所示,由操作人员打开腔室上盖120,将加工的标准铝件20放到腔室本体110开口处的腔室对接面上,对升降驱动部310进行调节,并使用游标卡尺通过人工手动测量的方式测量标准铝件20的下表面与晶圆10上表面在多个位置的高度差,直至多处高度差均达到某一标准值e(例如,可以是10mm),并记录此时升降驱动部310的进给量为b。
66.然后根据工艺要求的间距(预定距离c),可以确定晶圆10理论上运动到该位置时
升降驱动部310的进给量d=a+e+b-c,从而可根据该确定的进给量d,对升降驱动部310进行调节,如图4所示,实现将晶圆10升降至对应位置。
67.然而,在该过程中,高度差a是通过机械三维图模拟得到的,与实际值之间可能存在偏差,并且标准值e通过人工测量方式确定,测量过程中也不可避免地存在一定误差,导致最终确定的进给量d与实际所需的数值之间存在偏差,影响半导体工艺中晶圆10的上表面与工艺组件400的下表面之间实际工艺间距的精确性。
68.为解决上述技术问题,作为本发明的一个方面,提供一种半导体工艺腔室,包括腔体100和设置在腔体100中的工艺组件400、承载盘200、升降组件300,工艺组件400位于承载盘200的上方,用于在半导体工艺中对承载盘200上的晶圆10进行加热和/或向腔体100中提供工艺气体,升降组件300用于抬起或放下承载盘200上的晶圆10。
69.该半导体工艺腔室还包括控制装置和设置在腔体100底部的至少一个测距组件500,承载盘200上形成有位置与测距组件500一一对应的至少一个测距通孔210,测距组件500用于通过对应的测距通孔210对承载盘200上方的物体进行测距,控制装置用于控制测距组件500对工艺组件400进行测距(如图5所示),并在腔体100中传入晶圆10后,控制测距组件500对承载盘200上方的晶圆10进行测距(如图6所示),根据前后两次测距结果控制升降组件300对晶圆10进行升降,以使晶圆10的顶面与工艺组件400之间间隔预定距离c(如图7所示)。
70.在本发明提供的半导体工艺腔室中,控制装置能够在向腔体100中传入晶圆10前控制测距组件500对工艺组件400进行一次测距,在向腔体100中传入晶圆10后再控制测距组件500对晶圆10进行一次测距,从而可以确定晶圆10与工艺组件400之间的距离,进而根据该距离确定升降组件300升降晶圆10的高度,使晶圆10的顶面与工艺组件400之间的间隔在半导体工艺中精确保持在所需的预定距离c,且在该过程中,两次测距任务均由测距组件500自动实现,无需通过人工操作检测距离或者引入额外标准平面(现有技术中标准铝件20的下表面)进行间接测距,降低了测距误差,从而提高了确定升降组件300调节量所需数据的精度,进而保证了半导体工艺过程中晶圆10的顶面与工艺组件400之间间隔距离的精确性,提高了半导体工艺效果。
71.为延长测距组件500中精密器件的使用寿命,以降低半导体工艺腔室的维护成本,作为本发明的一种优选实施方式,如图5至图8所示,测距组件500固定设置在腔体100底壁的底面上,腔体100的底壁上设置有位置与测距组件500一一对应的至少一个观测窗600,测距组件500用于透过对应的观测窗600并通过对应的测距通孔210对承载盘200上方的物体进行测距。
72.在本发明实施例中,测距组件500固定设置在腔体100的外部,从而避免了测距组件500与腔体100中的工艺气体、等离子体或尾气直接接触,延长了测距组件500中精密器件的使用寿命,降低了半导体工艺腔室的维护成本。可选地,观测窗600的材质包括石英。
73.作为本发明的一种可选实施方式,如图5至图7所示,腔体100包括腔室本体110和腔室上盖120,腔室上盖120用于密封腔室本体110顶部的开口,工艺组件400设置在腔室上盖120上。
74.作为本发明的一种可选实施方式,如图5至图8所示,该半导体工艺腔室包括三个测距组件500,腔体100的底壁上对应设置有三个观测窗600,三个观测窗600可以环绕腔体
100的轴线周向等间隔分布,即,每两个观测窗600与腔体100底壁中心的连线之间的夹角为120
°
。
75.作为本发明的一种可选实施方式,如图5至图7所示,测距组件500包括激光测距传感器510和固定支架520,激光测距传感器510通过固定支架520固定设置在腔体100的底壁上,激光测距传感器510用于实现测距功能。
76.可选地,控制装置还用于控制半导体工艺腔室进行半导体工艺。
77.本发明实施例对半导体工艺腔室中进行的半导体工艺不做具体限定,例如,作为本发明的一种可选实施方式,工艺组件400具有加热功能,控制装置还用于在控制测距组件500对承载盘200上方的晶圆10进行测距后、与控制升降组件300对晶圆10进行升降的步骤之前进行晶圆刻蚀工艺,并在控制升降组件300对晶圆10进行升降的步骤后进行晶圆退火工艺。即,在结束晶圆刻蚀工艺后,将晶圆10抬升至其顶面与工艺组件400之间间隔退火工艺所需的预定距离c,再控制工艺组件400对晶圆10进行加热,以实现晶圆退火工艺。
78.或者,工艺组件400可以为匀流装置(showerhead),控制装置还用于在控制升降组件300对晶圆10进行升降后控制半导体工艺腔室进行晶圆刻蚀工艺。即,控制装置用于在两次测距后控制升降组件300将晶圆10抬升至其顶面与工艺组件400之间间隔刻蚀工艺所需的预定距离c,再控制工艺组件400向腔体100中提供工艺气体,并控制相应组件电离该工艺气体产生等离子体,以对晶圆10进行刻蚀。
79.又或者,工艺组件400可以为具有加热功能的匀流装置,控制装置还用于控制升降组件300对晶圆10进行多次升降并进行多次半导体工艺。即,两次测距结束后,先将晶圆10抬升至其顶面与工艺组件400之间间隔刻蚀工艺所需的预定距离,控制工艺组件400向腔体100中提供工艺气体,并控制相应组件电离该工艺气体产生等离子体,以对晶圆10进行刻蚀;再将晶圆10抬升至其顶面与工艺组件400之间间隔退火工艺所需的预定距离,控制工艺组件400对晶圆10进行加热,以实现晶圆退火工艺。
80.为提高控制晶圆10高度的精确性,作为本发明的一种优选实施方式,如图6所示,升降组件300包括升降驱动部310和多根顶针320,承载盘200上形成有位置与多根顶针320一一对应的多个顶针孔,升降驱动部310用于驱动多根顶针320的顶端穿过对应的顶针孔并伸出至承载盘200的承载面上方。
81.控制装置还用于在向腔体100中传入晶圆10前,控制升降组件300进行升降,使多根顶针320的顶端高于承载盘200的承载面(如图5所示),并将升降驱动部310当前的进给量记录为第一进给量e。
82.控制装置根据前后两次测距结果控制升降组件300对晶圆10进行升降的步骤具体包括:
83.根据前后两次测距结果和第一进给量e,将升降驱动部310调节至第二进给量d,以使晶圆10的顶面与工艺组件400之间间隔预定距离c。
84.在本发明实施例中,升降驱动部310在传片并对晶圆10进行测距前,将顶针320抬升至高于承载盘200的承载面,从而使晶圆10在测距时仅与顶针320的顶端接触,此时对升降驱动部310的进给量进行记录(记录为第一进给量e),即可作为步骤s3中调节晶圆10高度的依据,第二进给量d与第一进给量e之间的差值即为晶圆10待上升的高度,从而在根据前后两次测距结果确定晶圆10的高度调节量后,将升降驱动部310的进给量调节至第二进给
量d,即可确保晶圆10位于所需的位置,提高了控制晶圆10高度的精确性。
85.作为本发明的一种可选实施方式,控制装置还用于在完成半导体工艺后,控制升降组件300返回传片位(即,将升降组件300调节至第一进给量e,使顶针320升降至传入晶圆10时的高度),并将晶圆10由腔体100中传出。
86.为进一步提高控制晶圆10高度的精确性,作为本发明的一种优选实施方式,确定第二进给量d时还需考虑到晶圆10的厚度。具体地,控制装置根据前后两次测距结果和第一进给量e,将升降驱动部310调节至第二进给量d的步骤具体包括:
87.确定前后两次测距结果之间的测距差值z;
88.将第一进给量e与测距差值z相加,并减去预定距离c以及晶圆10的厚度m,得到第二进给量d;
89.将升降驱动部310调节至第二进给量d。
90.即,第二进给量d=第一进给量e+测距差值z-预定距离c-晶圆厚度m。可以理解的是,晶圆10的厚度m可根据当前批次晶圆的规格、尺寸信息得到,或者对该批次晶圆进行测量得到。
91.作为本发明的一种可选实施方式,半导体工艺腔室仅包括一个测距组件500,承载盘200上也仅对应形成有一个测距通孔210,前后两次测距结果即为该测距组件500两次进行测距得到的两个测距值,测距差值z即为前后两个测距值之间的差值。
92.为提高半导体工艺的安全性,作为本发明的一种优选实施方式,该半导体工艺腔室包括多个测距组件500,从而可以通过多个测距组件500的测距值之间是否一致,来判断承载盘200上方的晶圆10是否正常。
93.具体地,如图5至图7所示,半导体工艺腔室包括多个测距组件500,控制装置控制测距组件500对工艺组件400进行测距的步骤具体包括:获取多个测距组件500的多个第一测距值yi(y1、y2、
……
yn);
94.控制装置控制测距组件500对承载盘200上方的晶圆10进行测距的步骤具体包括:获取多个测距组件500的多个第二测距值xi(x1、x2、
……
xn);
95.控制装置确定前后两次测距结果之间的测距差值z的具体具体包括:
96.步骤s311、确定每个测距组件500的第一测距值y与第二测距值x的差值zi(即通过yi-xi=zi,求出z1、z2、
……
zn);
97.步骤s312、若多个差值zi中存在两者之间的差大于预设差值,则停止半导体工艺;
98.步骤s313、若多个差值zi中任意两者之间的差均小于或等于预设差值,则将多个差值zi的平均值确定为测距差值z。
99.在本发明实施例中,控制装置对每个测距组件500的前后两个测距值进行求差运算得到多个差值zi,并在对多个差值zi求平均值前,先对这些差值zi两两之间进行比较,当存在两者之间的差大于预设差值,则说明工艺组件400或者晶圆10水平度出现较大偏差或者晶圆10出现破损(部分测距组件500在第二次测距中未检测到晶圆10),需停止半导体工艺并对工艺组件400或者升降组件300进行检修(例如,调整升降组件300中顶针的高度),从而在半导体工艺前识别晶圆10或者半导体工艺腔室的异常情况,提高了半导体工艺的安全性。
100.作为本发明的一种可选实施方式,该预设差值为0.2mm(毫米)。
101.作为本发明的一种可选实施方式,如图5至图8所示,该半导体工艺腔室包括三个测距组件500,腔体100的底壁上对应设置有三个观测窗600,三个观测窗600环绕腔体100的轴线周向等间隔分布,即,每两个观测窗600与腔体100底壁中心的连线之间的夹角为120
°
。
102.对应地,控制装置可根据三个测距组件500的三个第一测距值y1、y2、y3,和三个第二测距值x1、x2、x3,得到三个差值z1、z2、z3。即,y1-x1=z1,y2-x2=z2,y3-x3=z3。步骤s31中对三个差值z1、z2、z3进行求平均值运算得到测距差值z。
103.为进一步提高半导体工艺的安全性,作为本发明的一种优选实施方式,控制装置还用于在向腔体100中传入晶圆10后,获取每个测距组件500的测距结果,若存在测距组件500的测距结果超出预设范围,则停止半导体工艺。
104.需要说明的是,该预设范围为晶圆10正常落在多根顶针320上后,测距组件500的正常测距结果上下浮动一定误差的范围,该误差范围大小可根据实际情况进行选取。在本发明实施例中,控制装置对传片后每个测距组件500的测距结果进行读取,当某一测距组件500的测距结果超出预设范围(即与正常测距值之间的偏差过大)时,则说明晶圆10在该位置(周向位置)的高度过高/高度过低或者出现残缺,从而及时识别晶圆10的异常情况(如,碎片)并停止半导体工艺,保证了半导体工艺的安全性。
105.作为本发明的一种可选实施方式,如图9所示,控制装置可以包括处理模块,例如工控机560。为提高测距精度,优选地,如图9所示,该半导体工艺腔室可以包括通讯模块550和与激光测距传感器510一一对应的至少一个放大器(如,第一放大器541、第二放大器542、第三放大器543),每个测距组件500的激光测距传感器510(如,第一激光测距传感器511、第二激光测距传感器512、第三激光测距传感器513)均通过对应的放大器以及通讯模块550与控制装置通信连接。放大器用于放大激光测距传感器510的测距信号,并通过通讯模块550将放大后的测距信号发送至控制装置,从而可以放大每个激光测距传感器510的测距信号,提高最终得到的测距值的精度。
106.作为本发明的一种可选实施方式,如图9、图10所示,控制装置还包括控制模块,例如可编程逻辑控制器(programmable logic controller,plc)530,可编程逻辑控制器530在工控机560的控制下通过输入/输出信号(i/o信号)控制每个放大器,实现设置放大器的功率模式等参数,重置(reset)放大器,或对放大器进行0漂校准等功能,并间接控制对应的每个激光测距传感器510,实现打开或关闭对应的激光测距传感器510(激光on/off)。同时还可以获取放大器反馈的信号,实现监控每个放大器的状态,如,报警(alm)状态、一些逻辑判定结果,等等。
107.可选地,如图10所示,控制装置通过可编程逻辑控制器530控制升降组件300中升降驱动部310的进给量。
108.作为本发明的第二个方面,提供一种半导体工艺方法,应用于本发明实施例提供的半导体工艺腔室,该半导体工艺方法包括:
109.步骤s1、控制测距组件500对工艺组件400进行测距(如图5所示);
110.步骤s2、向腔体100中传入晶圆10,并控制测距组件500对承载盘200上方的晶圆10进行测距(如图6所示);
111.步骤s3、根据前后两次测距结果控制升降组件300对晶圆10进行升降,以使晶圆10的顶面与工艺组件400之间间隔预定距离c(如图7所示);
112.步骤s4、进行半导体工艺。
113.本发明提供的半导体工艺方法在向腔体100中传入晶圆10前控制测距组件500对工艺组件400进行一次测距,在向腔体100中传入晶圆10后再控制测距组件500对晶圆10进行一次测距,从而可以确定晶圆10与工艺组件400之间的距离,进而根据该距离确定升降组件300升降晶圆10的高度,使晶圆10的顶面与工艺组件400之间的间隔在半导体工艺中精确保持在所需的预定距离c,且在该过程中,两次测距任务均由测距组件500自动实现,无需通过人工操作检测距离或者引入额外标准平面(现有技术中标准铝件20的下表面)进行间接测距,降低了测距误差,从而提高了确定升降组件300调节量所需数据的精度,进而保证了半导体工艺过程中晶圆10的顶面与工艺组件400之间间隔距离的精确性,提高了半导体工艺效果。
114.本发明实施例对步骤s4中进行的半导体工艺不做具体限定,例如,作为本发明的一种可选实施方式,工艺组件400具有加热功能,该半导体工艺方法还包括在步骤s2与步骤s3之间进行晶圆刻蚀工艺,s4中进行晶圆退火工艺。即,在结束晶圆刻蚀工艺后,将晶圆10抬升至其顶面与工艺组件400之间间隔退火工艺所需的预定距离c(即执行步骤s3),再控制工艺组件400对晶圆10进行加热,以实现晶圆退火工艺(即执行步骤s4)。
115.或者,工艺组件400可以为匀流装置(showerhead),步骤s4中进行晶圆刻蚀工艺。即,在步骤s3中,将晶圆10抬升至其顶面与工艺组件400之间间隔刻蚀工艺所需的预定距离c,在步骤s4中,控制工艺组件400向腔体100中提供工艺气体,并电离该工艺气体产生等离子体,以对晶圆10进行刻蚀。
116.又或者,工艺组件400可以为具有加热功能的匀流装置,步骤s3与步骤s4重复多次执行。即,在步骤s2结束后,先将晶圆10抬升至其顶面与工艺组件400之间间隔刻蚀工艺所需的预定距离c,控制工艺组件400向腔体100中提供工艺气体,并电离该工艺气体产生等离子体,以对晶圆10进行刻蚀(执行第一轮步骤s3和步骤s4);再将晶圆10抬升至其顶面与工艺组件400之间间隔退火工艺所需的预定距离c,控制工艺组件400对晶圆10进行加热,以实现晶圆退火工艺(执行第二轮步骤s3和步骤s4)。
117.为提高控制晶圆10高度的精确性,作为本发明的一种优选实施方式,如图6所示,升降组件300包括升降驱动部310和多根顶针320,承载盘200上形成有位置与多根顶针320一一对应的多个顶针孔,升降驱动部310用于驱动多根顶针320的顶端穿过对应的顶针孔并伸出至承载盘200的承载面上方;
118.半导体工艺方法还包括:在向腔体100中传入晶圆10前,控制升降组件300进行升降,使多根顶针320的顶端高于承载盘200的承载面(如图5所示),并将升降驱动部310当前的进给量记录为第一进给量e;
119.步骤s3中根据前后两次测距结果控制升降组件300对晶圆10进行升降,具体包括:
120.根据前后两次测距结果和第一进给量e,将升降驱动部310调节至第二进给量d,以使晶圆10的顶面与工艺组件400之间间隔预定距离c。
121.在本发明实施例中,升降驱动部310在传片并对晶圆10进行测距前,将顶针320抬升至高于承载盘200的承载面,从而使晶圆10在测距时仅与顶针320的顶端接触,此时对升降驱动部310的进给量进行记录(记录为第一进给量e),即可作为步骤s3中调节晶圆10高度的依据,第二进给量d与第一进给量e之间的差值即为晶圆10待上升的高度,从而在根据前
后两次测距结果确定晶圆10的高度调节量后,将升降驱动部310的进给量调节至第二进给量d,即可确保晶圆10位于所需的位置,提高了控制晶圆10高度的精确性。
122.作为本发明的一种可选实施方式,该半导体工艺方法,还包括在完成半导体工艺后,控制升降组件300返回传片位(即,将升降组件300调节至第一进给量e,使顶针320升降至传入晶圆10时的高度),并将晶圆10由腔体100中传出。
123.为进一步提高控制晶圆10高度的精确性,作为本发明的一种优选实施方式,确定第二进给量d时还需考虑到晶圆10的厚度。具体地,步骤s3中根据前后两次测距结果和第一进给量e,将升降驱动部310调节至第二进给量d的步骤具体包括:
124.步骤s31、确定前后两次测距结果之间的测距差值z;
125.步骤s32、将第一进给量e与测距差值z相加,并减去预定距离c以及晶圆10的厚度m,得到第二进给量d;
126.步骤s33、将升降驱动部310调节至第二进给量d。
127.即,第二进给量d=第一进给量e+测距差值z-预定距离c-晶圆厚度m。可以理解的是,晶圆10的厚度m可根据当前批次晶圆的规格、尺寸信息得到,或者对该批次晶圆进行测量得到。
128.作为本发明的一种可选实施方式,半导体工艺腔室仅包括一个测距组件500,承载盘200上也仅对应形成有一个测距通孔210,前后两次测距结果即为该测距组件500两次进行测距得到的两个测距值,测距差值z即为前后两个测距值之间的差值。
129.为提高半导体工艺的安全性,作为本发明的一种优选实施方式,该半导体工艺腔室包括多个测距组件500,从而可以通过多个测距组件500的测距值之间是否一致,来判断承载盘200上方的晶圆10是否正常。
130.具体地,如图5至图7所示,半导体工艺腔室包括多个测距组件500,步骤s1中控制测距组件500对工艺组件400进行测距的步骤具体包括:获取多个测距组件500的多个第一测距值yi(y1、y2、
……
yn);
131.步骤s2中控制测距组件500对承载盘200上方的晶圆10进行测距的步骤具体包括:获取多个测距组件500的多个第二测距值xi(x1、x2、
……
xn);
132.步骤s31具体包括:
133.步骤s311、确定每个测距组件500的第一测距值y与第二测距值x的差值zi(即通过yi-xi=zi,求出z1、z2、
……
zn);
134.步骤s312、若多个差值zi中存在两者之间的差大于预设差值,则停止半导体工艺;
135.步骤s313、若多个差值zi中任意两者之间的差均小于或等于预设差值,则将多个差值zi的平均值确定为测距差值z。
136.在本发明实施例中,对每个测距组件500的前后两个测距值进行求差运算得到多个差值zi,并在对多个差值zi求平均值前,先对这些差值zi两两之间进行比较,当存在两者之间的差大于预设差值,则说明工艺组件400或者晶圆10水平度出现较大偏差或者晶圆10出现破损(部分测距组件500在第二次测距中未检测到晶圆10),需停止半导体工艺并对工艺组件400或者升降组件300进行检修(例如,调整升降组件300中顶针的高度),从而在半导体工艺前识别晶圆10或者半导体工艺腔室的异常情况,提高了半导体工艺的安全性。
137.作为本发明的一种可选实施方式,该预设差值为0.2mm(毫米)。
138.作为本发明的一种可选实施方式,如图5至图8所示,该半导体工艺腔室包括三个测距组件500,腔体100的底壁上对应设置有三个观测窗600,三个观测窗600环绕腔体100的轴线周向等间隔分布,即,每两个观测窗600与腔体100底壁中心的连线之间的夹角为120
°
。
139.对应地,步骤s311中可根据三个测距组件500的三个第一测距值y1、y2、y3,和三个第二测距值x1、x2、x3,得到三个差值z1、z2、z3。即,y1-x1=z1,y2-x2=z2,y3-x3=z3。步骤s31中对三个差值z1、z2、z3进行求平均值运算得到测距差值z。
140.为进一步提高半导体工艺的安全性,作为本发明的一种优选实施方式,该半导体工艺方法还包括:
141.在向腔体100中传入晶圆10后,获取每个测距组件500的测距结果;
142.若存在测距组件500的测距结果超出预设范围,则停止半导体工艺。
143.需要说明的是,该预设范围为步骤s2中晶圆10正常落在多根顶针320上后,测距组件500的正常测距结果上下浮动一定误差的范围,该误差范围大小可根据实际情况进行选取。在本发明实施例中,对传片后每个测距组件500的测距结果进行读取,当某一测距组件500的测距结果超出预设范围(即与正常测距值之间的偏差过大)时,则说明晶圆10在该位置(周向位置)的高度过高/高度过低或者出现残缺,从而及时识别晶圆10的异常情况(如,碎片)并停止半导体工艺,保证了半导体工艺的安全性。
144.为进一步提高半导体工艺的安全性并保证机台生产节奏,作为本发明的一种优选实施方式,该半导体工艺方法还包括:在控制半导体工艺腔室停止半导体工艺后,发出报警(例如,控制报警灯发光或闪烁、控制蜂鸣器响铃或者控制操作界面弹出报警窗口,等等)。
145.可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1