供存储库与OHT交换晶圆盒的运输装置、天车窗口及存储库的制作方法
供存储库与oht交换晶圆盒的运输装置、天车窗口及存储库
技术领域
1.本发明涉及半导体制造设备技术领域,具体涉及一种供存储库与空中运输车(oht)交换晶圆盒的运输装置、天车窗口及存储库。
背景技术:
2.随着集成电路在日常生活中的普遍应用,半导体在产品中的地位日益重要,其市场需求相对也得到了大幅提升,全球半导体市场已获得蓬勃发展。为了满足半导体集成电路的大量需求,半导体制造企业都以提高产能及合格率为优先目标。在半导体制造企业中,用于生产集成电路的晶片通常是采用批量化搬运方式,即多个晶片放于硅片存储盒(也可称晶圆盒,front open unified pod,foup)进行搬运。鉴于人力搬运不仅效率低,也容易发生危险,且搬运过程中存在芯片污染、芯片碰撞破碎等不确定因素,自动物料搬运系统(amhs,automatic material handling system)应运而生,并且已经广泛应用在半导体制造行业中。
3.在amhs中存储库(也可称存储系统,stk,stocker)是一种面向半导体行业的洁净式立体仓库,用于批量存储晶片(或者说foup);空中运输车(oht,overheadhoisttransportation)是一种可以运行在空中轨道上的用于自动搬运foup的运输设备,因具有较大的空间自由度而广泛应用在自动物料搬运系统中,空中运输车在晶片厂(fabrication,fab)中的各个存储系统之间自动搬运foup,辅助完成fab中各个工序之间衔接。
4.目前,现有可供储存库与空中运输车之间交换晶圆盒的自动运输装置,是在fab厂原先较低产能需求时布设的设备,但在面对fab厂新产能需求时,运输装置存在的诸多不足之处逐渐显现出来,比如整体布局落后,占用存储库较大空间,部署位置不灵活,自动化搬运方式不够灵活等等,这些不足之处已经严重地制约了fab厂产能提升,比如将晶圆盒从存储库传送给空中运输车的效率偏低,比如将晶圆盒从空中运输车传送给存储库的效率不高,比如晶圆盒交换中平稳性不高等等。
5.因此,在fab厂的新产能需求下,需要一种新的可供存储库与空中运输车之间交换晶圆盒的自动运输方案。
技术实现要素:
6.有鉴于此,本发明提供一种存储库和供存储库与空中运输车交换晶圆盒的运输装置,可在存储库与空中运输车之间交换晶圆盒时对晶圆盒高效地自动运输,进行暂存、运输,保障晶圆盒交换能够平稳、高效地进行,以满足半导体工厂对新产能需求。
7.本发明提供以下技术方案:本发明提供一种供存储库与空中运输车交换晶圆盒的运输装置,所述运输装置设置于天车窗口的交换运输通道内,所述交换运输通道包括第一暂存舱段、运输舱段和第二暂存舱段,所述第一暂存舱段和所述运输舱段悬空于存储库的外侧,所述第二暂存舱段为
存储库内的目标阁位,所述第一暂存舱段和所述第二暂存舱段均设置有晶圆盒托架;所述运输装置包括:安装于所述交换运输通道的底部上的第一移动机构;连接于所述第一移动机构上的第二移动机构;连接于所述第二移动机构上的托盘;用于控制所述第一移动机构和所述第二移动机构的控制机构;其中,在所述控制机构的控制下,所述第一移动机构用于在水平方向上移动所述第二移动机构;所述第二移动机构用于在竖直方向上移动所述托盘;所述托盘用于在所述第二移动机构沿竖直方向上移动时,从所述晶圆盒托架的下方取放目标晶圆盒。
8.本发明还提供一种供存储库与空中运输车交换晶圆盒的天车窗口,所述天车窗口设置有若干交换运输通道,所述交换运输通道包括运动机构、第一暂存舱段、运输舱段和第二暂存舱段,所述第一暂存舱段和所述运输舱段悬空于存储库的外侧,所述第二暂存舱段为存储库内的目标阁位,所述第一暂存舱段和所述第二暂存舱段均设置有晶圆盒托架,所述运动机构设置于所述交换运输通道内,其中所述运动机构为本说明书中任意一项实施例所述的运输装置。
9.本发明还提供一种存储库,所述存储库包括如本说明书中任意一项所述的天车窗口,其中所述天车窗口用于供存储库与空中运输车交换晶圆盒;或者,所述存储库包括如本说明书中任意一项实施例所述的运输装置,所述运输装置用于供存储库与空中运输车交换晶圆盒。
10.与现有技术相比,本发明采用的上述至少一个技术方案能够达到的有益效果至少包括:对运输装置进行优化改进后,形成小型化的运输装置,在将该运输装置部署于存储库的天车窗口(或者说天车窗口中的运输通道)中时,可充分利用存储库的空间,使得天车窗口实际上无需占用存储库内部空间,还有该运输装置可灵活在天车窗口中的暂存位置往返运动,提高交换效率;以及运输装置作直线式位移运动时,平稳性高、速度快,保证了晶圆盒搬运的平稳性、安全性和效率。
附图说明
11.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
12.图1是本发明提供的配套有新型小型化运输装置后的天车窗口改造后位于存储库外侧的一侧视图示意图;图2是本发明提供的配套有新型小型化运输装置后的天车窗口改造后位于存储库外侧的俯视图示意图;图3是本发明提供的一种供存储库与空中运输车交换晶圆盒的运输装置的结构示意图;图4是本发明提供的一种供存储库与空中运输车交换晶圆盒的运输装置的结构示意图;图5是本发明提供的一种供存储库与空中运输车交换晶圆盒的运输装置的主要结
构俯视图示意图;图6是本发明提供的一种供存储库与空中运输车交换晶圆盒的天车窗口中交换运输通道的示意图;图7是本发明提供的一种供存储库与空中运输车交换晶圆盒的天车窗口未放置晶圆盒时的俯视示意图;图8是本发明提供的一种供存储库与空中运输车交换晶圆盒的天车窗口放置有晶圆盒时的一侧视图示意图;图9是本发明提供的一种供存储库与空中运输车交换晶圆盒的天车窗口放置有晶圆盒时的正面视图示意图;图10是本发明提供的一种供存储库与空中运输车交换晶圆盒的天车窗口放置有晶圆盒时的俯视图示意图;图11是本发明提供的一种供存储库与空中运输车交换晶圆盒的天车窗口中悬挂支架的结构示意图;图12是本发明提供的悬挂支架中提起支架力托的结构示意图;图13是本发明提供的悬挂支架中提起支架杆的结构示意图;图14是本发明提供的供存储库与空中运输车交换晶圆盒的天车窗口的侧面视图示意图;图15是本发明提供的一种存储库的正面视图示意图;图16是本发明提供的一种存储库的背面视图示意图;图17是本发明提供的一种存储库的左侧视图示意图;图18是本发明提供的一种存储库的立体侧视图示意图;图19是本发明提供的一种存储库的立体侧视图示意图;图20是本发明提供的一种存储库的立体俯视图示意图;图21是本发明提供的一种存储库中天车窗口的通道自定义功能的示意图。
具体实施方式
13.下面结合附图对本技术实施例进行详细描述。
14.以下通过特定的具体实例说明本技术的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本技术的其他优点与功效。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。本技术还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本技术的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
15.要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本技术,所属领域的技术人员应了解,本文中所描述的一个方面可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目和方面来实施设备及/或实践方法。另外,可使用除
了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
16.还需要说明的是,以下实施例中所提供的图示仅以示意方式说明本技术的基本构想,图式中仅显示与本技术中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
17.另外,在以下描述中,提供具体细节是为了便于透彻理解实例。然而,所属领域的技术人员将理解,可在没有这些特定细节的情况下实践所述方面。术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等描述的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
18.目前,fab厂中存放晶圆盒的存储库中,设置有若干阁位,鉴于晶圆对所处环境有净化要求,通常储存库与外部交换晶圆盒时,可以通过特定窗口进行,比如在存储库设置天车窗口,存储库中的堆垛机将晶圆盒放于天车窗口内侧,天车窗口的运输机构将该晶圆盒运输到天车窗口外侧,空中运输车从天车窗口外侧取走晶圆盒,又比如在存储库外部运行的空中运输车将晶圆盒放于天车窗口外侧,天车窗口中的运输机构将该晶圆盒传送到天车窗口内侧,储存库的堆垛机从天车窗口内侧取走晶圆盒。因此,天车窗口是供存储库与空中运输车之间交换晶圆盒的一个自动化搬运窗口。
19.但是,由于原有天车窗口是在fab厂较低产能需求的应用下部署设计,不仅运输机构的传动结构、传动方式相较陈旧,而且运输机构设置于天车窗口时需要设置在特定区域以及占用存储库较多空间,因而在fab厂当前新产能需求下,天车窗口的自动运输性能已成为fab厂新产能任务实施的瓶颈。
20.有鉴于此,通过对fab厂中存储、运输晶圆盒相关的存库储、天车窗口、运输机构等进行深入研究及改进探索后,提出了一种可以快速部署应用在空中运输车与存储库之间暂存、交换晶圆盒的自动化运输新方案:如图1和图2所示,鉴于存储库中,堆垛机取放阁位上的晶圆盒时,是通过托举晶圆盒底部进行取放操作,因而每个阁位的下方均有一定操作空间,因而可通过充分利用该操作空间作为天车窗口中运输装置的运动空间来构建新的运输通道,因而可将存库储中个别阁位(图中以存储库一侧的两个并排阁位为示意说明)所在位置改造为天车窗口在存储库中的对应位置。
21.其中,从天车窗口外端向存储库传送晶圆盒的方向观察,窗口中的每个交换运输通道可划分为3个位置舱段:晶圆盒暂存位置、晶圆盒运动段、晶圆盒存放位置,其中晶圆盒暂存位置用于空中运输车取放晶圆盒时晶圆盒的暂存位置,晶圆盒运动段为天车窗口中运输装置在晶圆盒存放位置和晶圆盒暂存位置之间往返移动的主要运动空间,晶圆盒存放位置可为存储库内部的阁位空间,即利用存储库的阁位位置空间作为运输通道中的晶圆盒存放位置,晶圆盒运动段与晶圆盒暂存位置为天车窗口的运输通道外突于存储库外面且悬于空中的部分。
22.因此,改进后的天车窗口(或者说天车窗口中的运输通道),非常便于在fab厂进行部署应用:一方面,天车窗口实际上并未占用存储库内部空间,仅是将存储库的个别阁位空
间改造为用于存储库与空中运输车交换晶圆盒时堆垛机临时取放的晶圆盒暂存位置,即天车窗口中位于存储库内部的舱段(亦即如前述3个舱段中的晶圆盒放置位置)仍可用作阁位空间;二方面,存储库与空中运输车交换晶圆盒时,无需空中运输车进入到存储库内部,可以保证储存库内部不受空中运输车的影响(比如环境净化要求、自动化操作的干扰、碰撞等),以及空中运输车可以将晶圆盒暂存于天车窗口外侧,有利于提高交换效率;三方面,可灵活地在存储库中改造出天车窗口(或者说供存储库与空中运输车之间交换晶圆盒的运输操作空间),即通过将该阁位原下方操控空间改造为可以适用于天车窗口中运输装置往返运动的操作空间,而且天车窗口中悬空于存储库外部的舱段(亦即如前述3个舱段中的晶圆盒暂存位置、晶圆盒运动段)用作空中运输车与存储库交换的晶圆盒暂存位置和运输装置往返运动的操作空间。
23.需要说明的是,存储库向空中运输车交换的晶圆盒,被堆垛机暂放于前述晶圆盒放置位置后,运输装置可以将晶圆盒运输至前述晶圆盒暂存位置,以便空中运输车从该晶圆盒暂存位置取走晶圆盒;相应的,空中运输车向存储库交换的晶圆盒,被空中运输车暂放于前述晶圆盒暂存位置后,运输装置可以将晶圆盒运输至前述晶圆盒放置位置,以便堆垛机从该晶圆盒放置位置取走晶圆盒。因此,可将交换通道设置为输入通道(即空中运输车向存储库交换晶圆盒)或者输出通道(即存储库向空中运输车交换晶圆盒),通道里的两个位置(即前述的晶圆盒暂存位置和晶圆盒放置位置)可以用于晶圆盒的暂存、交换等。
24.需要说明的是,天车窗口中可以设置多个运输通道,比如前述示意说明中存储库两侧分别设置了两个通道,可在存储库中构建出四个交换运输通道。还有,各个通道可根据实际工厂需要定义为输入通道(即空中运输车将晶圆盒传送入存储库)、输出通道(即存储库将晶圆盒向外部传送)、暂存通道(即空中运输车将晶圆盒暂存于天车窗口)等等。因此,本说明书各实施示意说明中,涉及到的交换运输通道的数量、用途等示意说明,可根据fab厂产能提升的实际需要进行设定,这里不作限定。
25.以下结合附图,说明本说明书中各实施例提供的技术方案。
26.如图3所示,通过对运输装置进行优化改进,形成了一种新型小型化的运输装置,进而可将该新型小型化的运输装置用于新型天车窗口的交换运输通道中,不仅可以充分利用了存储库中阁位下方操作空间,而且有利于提高晶圆盒交换运输的整体性能(比如效率、平稳性等),可以提升通过天车窗口交换晶圆盒的性能,满足fab厂对新产能的需求。
27.需要说明的是,该新型小型化的运输装置可以配套于天车窗口的交换运输通道内,为便于说明和理解,这里将交换运输通道定义为三个主要舱段,即交换运输通道包括第一暂存舱段(即前述晶圆盒暂存位置,下面不作区分,下同)、运输舱段(即前述晶圆盒运动段)和第二暂存舱段(即前述晶圆盒存放位置),所述第一暂存舱段和所述运输舱段悬空于存储库的外侧,所述第二暂存舱段为存储库内的目标阁位,所述第一暂存舱段和所述第二暂存舱段均设置有晶圆盒托架。
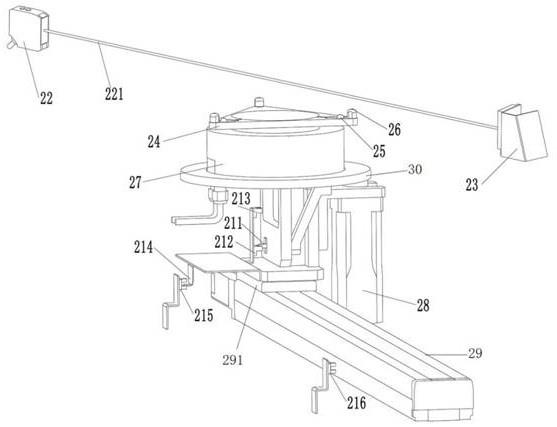
28.如图3和图4所示,本说明实施例的一种供存储库与空中运输车交换晶圆盒的运输装置,包括:安装于交换运输通道的底部上的第一移动机构29;连接于所述第一移动机构上的第二移动机构28;连接于所述第二移动机构上的托盘24;用于控制所述第一移动机构和所述第二移动机构的控制机构210。
29.实施中,第一移动机构29可以为单直线方向上进行移动的机构,第二移动机构28可以安装于第一移动机构29的移动部上,从而可以跟随第一移动机构29作单直线的往返移动,比如在图示中的水平方向上的往返移动。
30.第二移动机构28可以为单直线方向上进行移动的机构,托盘24可以安装于第二移动机构28的移动部上,从而可以跟随第二移动机构28作单直线的往返移动,比如在图示中的竖直方向上的往返移动。
31.托盘24用于承载晶圆盒,从而在跟随第二移动机构运动时,承载着晶圆盒作移动,比如沿x轴、z轴等作直线往复运动。
32.因此,可以在所述控制机构210的控制下,所述第一移动机构29用于在水平方向上移动所述第二移动机构28;所述第二移动机构28用于在竖直方向上移动所述托盘24;所述托盘24用于在所述第二移动机构沿竖直方向上移动时,从所述晶圆盒托架(图3、图4中未示出)的下方取放目标晶圆盒。需要说明的是,目标晶圆盒为待交换的晶圆盒。
33.通过在交换运输通道的底部上部空间设置第一移动机构、第二移动机构、托盘,形成小型化的运输装置,该小型化运输装置可以充分结合存储库中阁位下方空间进行晶圆盒交换时的运输操作,也有利于将该运输装置应用于天车窗口后,可以在存储库中通过对阁位的简单改造构成新型的天车窗口,比如将该阁位位于存储库的外侧面去掉,以及将运输装置的一侧设置于该阁位的下方,另一侧悬空于存储库外侧,天车窗口可以根据fab厂的实际需要进行灵活部署应用。
34.在一些实施方式中,如图3、图4和图5所示,可在托盘24和第二移动机构28之间设置有旋转机构27,便于在所述控制机构的控制下旋转托盘24,通过托盘的转动将托盘上的晶圆盒按放置需要而进行转向操作。
35.例如,当空中运输车放置在晶圆盒托架上的晶圆盒方向未符合传送要求时,可通过旋转机构27将晶圆盒旋转至正确方位,便于后续交换操作。
36.在一些实施方式中,旋转机构27可以包括直接驱动马达(即dd马达),以及所述运输装置还包括安装圆盘30,其中所述安装圆盘30设置于所述直接驱动马达和所述第二移动机构之间。
37.需要说明的是,安装圆盘30的具体结构形式可以为圆形法兰、圆形盘片等,这里不作限定。
38.直接驱动马达通常为圆柱状的结构形式,因而圆柱状结构可以良好地支承托盘,有利于提高托盘在水平、竖直等方向上进行移动时的稳定性,进而可以降低移动对晶圆盒的冲击影响。
39.采用安装圆盘后,不仅有利于承托旋转机构,将旋转机构、托盘稳定地进行承托,而且安装圆盘的面积相对较大,配合通道中的框架可以有效地避免托盘上方的其他多余物品掉落而对第二移动机构、第一移动机构等造成影响。
40.在一些实施方式中,如图5所示,托盘24上可以设置有在取放晶圆盒时对所取放的晶圆盒进行定位、检测的相关装置。
41.例如,托盘24上设置有按钮型微动开关25、定位销26,当空中穿梭小车(即空中运输车,下面不作区分)上的晶圆盒需要传送到储存库中,空中穿梭小车将携带的晶圆盒放置在晶圆盒托架(如u型托板)上,但是当前放置的晶圆盒方向不是预设方向时,u型托板自身
没有旋转功能,所以空中穿梭小车与天车窗口中的控制器(即控制机构210)通过通讯协议通信后,控制器首先发送指令给第二移动机构28(比如电动推杆),带动安装圆盘30及上方整体上移直到定位销26完全卡进晶圆盒底面凹槽,且晶圆盒底面触发微动开关25发送信号指令反馈给控制器,控制器进一步发送命令给第二移动机构28继续在竖直方向(如z轴正方向上)作位移运动,直至晶圆盒底面离u型托板的高度大于u型托板自身定位销高度后,控制器发送指令到r轴旋转驱动机构dd马达驱动托盘24带动晶圆盒在水平面上沿z轴旋转180度,将晶圆盒方向调整为适合运输的方向。
42.在一些实施方式中,所述第一移动机构可以指作单直线运动的机构,比如滑台模组,因而具体实施中第一移动机构可以包括滑台模组,滑台模组可以沿交换运输通道的水平方向进行设置,并设置于交换运输通道的底部中央位置上,实际设置时可以设置于通道两头晶圆盒托架的中心线上。
43.需要说明的是,滑台模组可指具有导向、送给、夹紧等功能组织的模组化产品,滑台模组的选型可根据部署需要选择市售产品,这里不作限定。
44.需要说明的是,所述第一移动机构也可以是其他形式的直线运动模组,比如通过电机驱动丝杆旋转、丝杠再将旋转运动转换为直线运动的直线模组,以便于驱动晶圆盒在直线方向(比如x轴上)作直线位移运动,从而携带着晶圆盒在天车窗口中的交换运输通道内往返移动。
45.在一些实施方式中,所述第二移动机构可以指作单直线运动的机构,比如电动推杆,因而具体实施中所述第二移动机构可以包括电动推杆,所述电动推杆竖直设置于所述第一移动机构的移动部上。
46.需要说明的是,电动推杆驱动托盘移动时,电动推杆可以相对于第一移动机构的滑动部静止设置,而电动推杆的输出端可以用于驱动托盘在竖直方向上移动,具体可根据电动推杆的选型、实际部署设置等设置电动推杆驱动托盘的方式。
47.在一些实施方式中,所述控制机构可以是用于控制运输装置中不同机构协同工作的控制装置,可以为控制器、控制板等形式。
48.实施中,可选用成熟的工控机作为控制机构的核心部件,其中工控机分别与所述第一移动机构和所述第二移动机构电连接。
49.需要说明的是,可以根据部署需要设置工控机的安装方式、具体位置等,比如工控机可以设置于所述第一移动机构的移动部上,跟随第一移动机构的移动部在水平方向上移动,比如工控机设置于第二移动机构的移动部上,跟随第二移动机构的移动部在竖直方向上移动,比如工控机设置于通道内部或者内部,不作运动。
50.需要说明的是,工控机与第一移动机构和第二移动机构之间的电连接方式,可以为有线连接,也可以是无线连接,具体可以根据部署情况确定,这里不作限定。
51.在一些实施方式中,作往返移动的第一移动机构、第二移动机构中各自均可包括有相应的驱动机构和移动部,有利于各自进行独立控制。
52.实施中,如图3、图4和图5所示,所述第一移动机构包括第一驱动机构(图中未示出)和移动安装部291,所述第二移动机构包括第二驱动机构281、第一安装座282和第二安装座283。其中,第一驱动机构用于驱动移动安装部291在水平方向上作直线移动;移动安装部291与第一安装座282固定连接,第二安装座283与第一安装座282之间滑动连接;第二驱
动机构281用于驱动第二安装座283在竖直方向上作直线移动。
53.在一些实施方式中,安装座的结构可设置为形状简单且安装及使用方便的结构形式,比如l形状的结构件。
54.实施中,第一安装座282可以包括第一l型安装板,第二安装座283包括第二l型安装板。因此,移动安装部291与第一安装座282之间的固定连接,以及第二安装座283与第一安装座282之间滑动连接,可以转化为以下连接方式:第一l型安装板的第一臂与移动安装部291固定连接;第一l型安装板的第二臂上设置有滑动部(比如图中示意的滑槽),第二l型安装板的第一臂设置有与所述滑动部进行滑动连接的配合部(比如图中示意的镶嵌于滑槽中的凸部);第二l型安装板的第二臂与第二驱动机构281连接,以便所述第二驱动机构281驱动所述第二l型安装板在竖直方向上作直线移动。
55.第一移动机构29(比如直线模组)可以驱动晶圆盒在x轴上做直线位移运动,第二驱动机构281(比如电动推杆)驱动第二l型安装板在z轴上作直线位移移动,从而驱动晶圆盒在z轴上做直线运动,如当空中穿梭小车将晶圆盒放置在u型托板上时,电动推杆作为驱动机构推动圆形法兰盘(即前述安装圆盘30,其中法兰盘带动dd马达及托盘24)整体作位移运动,比如在取走晶圆盒操作中,首先驱动托盘24向上位移一定距离,托盘24托举晶圆盒脱离晶圆盒托架的定位销,即高出托架定位销一定的距离后,托盘24可以托举着晶圆盒,从而为x轴运动做好准备。
56.通过采用l型结构件,结构简单,易于安装和使用,而且通过l型结构件之间滑动和固定配合,有利于保障晶圆盒在移动操作中的平稳性。
57.在一些实施方式中,可对移动机构的位移运动进行限位检测,便于移动机构准确、可靠地运动到指定位置(比如晶圆盒取放操作的位置)。
58.在一种实施方式中,所述运输装置还可包括:第一检测机构,所述第一检测机构包括第一检测部和第一触发部,所述第一检测部设置于第一目标侧的两端,所述第一目标侧为所述第一移动机构的一侧,所述第一触发部跟随所述第一移动机构的移动部移动,其中当所述第一触发部到达所述第一检测部时,所述第一检测部向所述控制机构发送第一触发信号,所述第一触发信号用于触发控制所述第一移动机构的移动部运动到第一指定位置,所述第一指定位置为所述托盘位于所述晶圆盒托架的正下方时所述第一移动机构的移动部停留位置。
59.通过在移动中利用第一检测部和第一触发部之间进行限位检测,即针对托盘24在第一暂存舱段或者第二暂存舱段中取放晶圆盒时需要在x轴上停留的位置,进而在第一移动机构的侧边对应位置设置有第一检测部,当第一触发部跟随第一移动机构的移动部运动到指定位置时,及时触发控制机构210控制第一移动机构停止移动,从而将托盘24运动到指定位置。
60.在一种实施方式中,所述运输装置还包括:第二检测机构,所述第二检测机构包括第二检测部和第二触发部,所述第二检测部设置于第二目标侧的两端,所述第二目标侧为所述第二移动机构的一侧,所述第二触发部跟随所述第二移动机构的移动部移动,其中当所述第二触发部到达所述第二检测部时,所述第二检测部向所述控制机构发送第二触发信号,所述第二触发信号用于触发控制所述第二移动机构的移动部运动到第二指定位置,所述第二指定位置为所述托盘取放所述晶圆盒托架上的目标晶圆盒时所述第二移动机构的
移动部停留位置。
61.通过在移动中利用第二检测部和第二触发部之间进行限位检测,即针对托盘24在第一暂存舱段或者第二暂存舱段中取放晶圆盒时需要在z轴上停留的位置,进而在第二移动机构的侧边对应位置设置有第二检测部,当第二触发部跟随第二移动机构的移动部运动到指定位置时,及时触发控制机构210控制第二移动机构停止移动,从而将托盘24运动到指定位置。
62.需要说明的是,检测机构和触发部的设置位置可根据实际部署需要进行设置,前述仅为一种实施示意说明,这里不再一一展开。
63.在一些实施方式中,可通过简易的检测方式实现前述运动中的限位检测。
64.如图3所示,所述第一检测部包括第一检测片215和第二检测片216,其中第一检测片215和第二检测片216均设置有第一检测开口(如图中的开口位置),其中在所述第一触发部(如图中示出的第一触发片214)到达所述第一检测开口时,所述第一检测开口产生所述第一触发信号;以及,所述第二检测部包括第三检测片212和第四检测片213,其中第三检测片212和第四检测片213均设置有第二检测开口,其中在所述第二触发部(如图中示出的第二触发片211)到达所述第二检测开口时,所述第二检测开口产生所述第二触发信号。
65.实施中,可将第二触发片211作为z轴检测的触发部(即前述的第二触发部),进而跟随第二移动机构的移动部在在z轴上进行位移运动;第三检测片212可以作为z轴负检测限位(即z轴上最低位置),限定出第二移动机构的移动部在z轴上的位移运动的下限,一旦超出该下限将可能出现失控的风险,从而通过负限位强制第二移动机构在z轴上的下限不能超过该负限位所限定的z轴位置,否则报警提醒;第四检测片213可用于z轴正检测限位,正限位是强制第二移动机构z轴上可到达的最高位置,超出则报警;第一触发片214可作为第一移动机构的x轴触发块,可以跟随第一移动机构的移动部在x轴上进行位移运动,如图中示意,第一触发片214可通过安装转接板与第一移动机构的移动部相对固定连接,便于跟随第一移动机构的移动部作x轴的位移运动;第一检测片215可作为第一移动机构的x轴负限位检测,即第一移动机构在x轴上的位移也需要控制在一定范围之内,强制第一移动机构在x轴上一端位置极限,超出则报警;第二检测片216可作为第一移动机构的x轴正限位检测,强制第一移动机构在x轴另一端极限位置停止,超出则报警。
66.需要说明的是,检测用的传感器可以设置于检测片中,也可以设置于触发部中,传感检测器可以设置为触发检测口输出相应的触发信号即可,这里不作限定。
67.在一些实施方式中,可在检测口中设置光电检测器,以及将触发部设置为遮光片、遮光板等形式。
68.在一种实施方式中,所述第一触发部包括遮光板,所述第一检测开口设置有至少第一光电检测器,其中所述第一光电检测器在检测到所述遮光板时,输出所述第一触发信号。
69.在一种实施方式中,所述第二触发部包括遮光板,所述第二检测开口设置有至少第一光电检测器,其中所述第一光电检测器在检测到所述遮光板时,输出所述第一触发信号。
70.需要说明的是,光电检测器、遮光板等可根据部署应用需要进行选型,这里不作限定。
71.基于相同发明构思,本发明还提供一种供存储库与空中运输车交换晶圆盒的天车窗口,天车窗口中部署有前述任意一个实施例中的运输装置,进而通过运输装置完成交换晶圆盒的运输操作。
72.参考图6至图10,所述天车窗口设置有若干交换运输通道3,其中交换运输通道3可包括运动机构33、第一暂存舱段303、运输舱段302和第二暂存舱段301,所述第一暂存舱段303和所述运输舱段302悬空于存储库的外侧,所述第二暂存舱段301为存储库内的目标阁位,所述第一暂存舱段303和所述第二暂存舱段301均设置有晶圆盒托架,所述运动机构33设置于所述交换运输通道3内,其中所述运动机构33为前述任意一个实施例中的所述运输装置。
73.需要说明的是,天车窗口部分悬空于存储库的外侧,以及这里以天车窗口中设置有两个交换运输通道3为例进行示意说明。本领域的技术人员应当能够理解的是,交换运输通道3的数量、部署位置等,可根据实际部署需要设定,以及可以参照本说明书中相关示意说明内容进行部署应用。
74.下面结合具体附图对天车窗口以及交换运输通道进行示意说明。
75.如图6所示,在交换运输通道中,所述第一暂存舱段的晶圆盒托架为由两个平行放置的矩形托板32构成,所述第二暂存舱段的晶圆盒托架为u型托板31,运动机构33设置于交换运输通道底部上中央位置。
76.实施中,u型托板31整体呈现u型的板件,矩形托板32整体采用两个平行矩形板件,运动机构33可以在u型托板31和矩形托板32所构成的下方空间往返移动,实现晶圆盒交换中的运输操作。
77.需要说明的是,u型托板31可为原阁位改造前的晶圆盒托架。
78.晶圆盒交换过程:当存储库中的晶圆盒需要传送到空中穿梭小车时,首先将存储库中的晶圆盒通过堆垛机运送到u型托板31上,然后运动机构33再将晶圆盒从u型托板31运送到双平行矩形托板32上,从而晶圆盒可以暂存于矩形托板32上,进一步等待空中穿梭小车将晶圆盒取走。当空中穿梭小车的晶圆盒需要传送到存储库中时,首先空中穿梭小车将晶圆盒放置于双平行矩形托板32上,晶圆盒可以暂存于矩形托板32上,然后运动机构33再将晶圆盒从矩形托板32运送至u型托板31上,晶圆盒可以暂存于u型托板31上,进一步等待存储库中的堆垛机将晶圆盒取走。
79.通过在通道中设置有晶圆盒暂存的位置(如矩形托板32、u型托板31等构成的晶圆盒托架),交换的晶圆盒可以暂存于通道中;以及通过在通道中设置有运动机构33,通过运动机构33可以及时将交换的晶圆盒搬运到相应暂存位置,晶圆盒被运动机构33搬运到交换过程中的暂存位置后,方便存储库或者空中运输车取走。
80.如图8至图10所示,示出了晶圆盒传送运输时的存储方向,即晶圆盒1无论是从存储库向空中穿梭小车传送,还是从空中穿梭小车向存储库传送,所有晶圆盒盖面都面向存储库,露出晶圆盒背面和向上方倾斜的提手部分,方便取放晶圆盒操作。需要说明的是,当暂存位置上的晶圆盒未按正确方向放置时,可利用运动机构的旋转操作调整晶圆盒方向。
81.在一些实施方式中,可以在晶圆盒托架上设置有相应的定位装置、检测装置。
82.在一种实施示例中,如图7所示,第一矩形托板84上设置第一定位销86,第一定位销86用于在目标晶圆盒被放置于第一舱段内时,与目标晶圆盒的底面外圈凹槽进行定位配
合;第一u型托板81上设置有三个第二定位销83,第二定位销83用于在目标晶圆盒被放置于第二舱段内时,与目标晶圆盒的底面外圈凹槽进行定位配合。
83.实施中,定位销位置与晶圆盒底面外圈凹槽的位置一致,便于晶圆盒在取放中定位,可以约束晶圆盒在水平面上的自由度。
84.在一种实施示例中,可在定位销附近设置相应的检测装置,对晶圆盒的取放状态进行检测。因此,所述交换运输通道还包括:第三检测机构,所述第三检测机构设置于与所述第一定位销相距第一距离的预设第一位置,所述第三检测机构用于检测目标晶圆盒是否平稳放置在所述矩形托板上;和/或,所述交换运输通道还包括:第四检测机构,所述第四检测机构设置于与所述第二定位销相距第二距离的预设第二位置,所述第四检测机构用于检测目标晶圆盒是否平稳放置在所述u型托板上。
85.实施中,第三检测机构可采用按钮性的检测开关实现。如图7所示,可在定位销附近设置按钮型微动开关,比如在一个通道内的第一矩形托板84上的第一定位销86附近设置第一按钮型微动开关85,进而当晶圆盒需要暂存在第一矩形托板84上时,可以通过第一按钮型微动开关85检测晶圆盒的放置是否平稳,只有在同时触发两个按钮型微动开关时,再判定晶圆盒已平稳放置在托板上;相应地,第一u型托板81上的第二定位销83的附件设置有相应的第二按钮型微动开关82。
86.需要说明的是,另一个通道内的第二矩形托板94、第二u型托板91等也作类似设置,即配置有定位销(如附图7中的第三定位销96、第四定位销93)、按钮型微动开关(如附图7中的第三按钮型微动开关95、第四按钮型微动开关92)等,这里不再展开说明。
87.需要说明的是,这里以两个按钮型微动开关为了说明,实际部署应用中开关的数量、偏离定位销的距离、具体位置等可根据需要进行部署设置,这里不做限定。
88.在一种实施示例中,可在通道内部署有对暂存位置上是否存在晶圆盒进行状态检测的检测装置。
89.实施中,所述交换运输通道还包括:第五检测机构,所述第五检测机构设置于所述第二暂存段内,且位于所述运动机构的上方,所述第五检测机构用于检测所述第二暂存段内是否存在晶圆盒和/或监测所述运动机构到达所述第二暂存段内是否携带有目标晶圆盒;和/或,所述交换运输通道还包括:第六检测机构,所述第六检测机构设置于所述第一暂存段内,且位于所述运动机构的上方,所述第六检测机构用于检测所述第一暂存段内是否存在晶圆盒和/或监测所述运动机构到达所述第一暂存段内是否携带有目标晶圆盒。
90.通过在暂存位置设置检测机构,可在晶圆盒的交换前、交换中以及交换后等环节实时获知暂存位置的晶圆盒情况,以及实时获知托盘是否将交换晶圆盒运输到指定位置。
91.在一种实施示例中,检测机构的核心可以为光电传感器。
92.如图7至10所示,所述第五检测机构包括第一光电传感器22和第一反光板23,所述第一光电传感器22和第一反光板23位于所述第二暂存段的晶圆盒托架上方,其中第一光电传感器22和第一反光板23分设于两侧设置,进而在第一光电传感器22发出光线221时,若无晶圆盒的遮挡,光线221达到第一反光板23后,被第一反光板23反射回第一光电传感器22,若存在晶圆盒,晶圆盒将光线221遮挡,第一光电传感器22将无法接收到第一反光板23发射的光线221。
93.需要说明的是,实际部署应用中,第一光电传感器22和第一反光板23可以为一组
或者多组,第一光电传感器22和第一反光板23的部署位置也可以根据实际需要进行设置,这里不作限定。
94.需要说明的是,第二暂存舱段中还可以设置有第四光电传感器21(可参见前述运输装置中的图4示意),便于对第二暂存舱段的晶圆盒状态进行检查,第四光电传感器21的位置、数量等不作限定。
95.实施中,所述第六检测机构可包括第二光电传感器(图中未示出)和第二反光板(图中未示出),所述第二光电传感器和第二反光板位于所述第一暂存段的晶圆盒托架上方。需要说明的是,第一暂存舱段还可以设置有第四光电传感器21,便于对第一暂存舱段的晶圆盒状态进行检查,这里不再展开。
96.如图8所示,第三光电传感器10可以设置于第一暂存舱段的保护架上,其中第三光电传感器10包括光电传感器的投光部分和受光部分,每个保护架上设有2个分别分布在保护架的两个直线杆上,且在同一直线上。
97.当天车窗口与空中穿梭小车之间交换晶圆盒的时候,空中穿梭小车首先到达天车窗口上方一定距离位置,并可通过第三光电传感器10判断当前天车窗口上是否有晶圆盒,便于后续交换运输操作。
98.当任务为空中穿梭小车将携带的晶圆盒传送给天车口时,首先需要天车窗口上的投光部分发射光电信号给受光部分,当受光部分接收并检测到光电信号时,表明将要放置晶圆盒到当前没有晶圆盒的暂存位置上,可以将空中穿梭小车上的晶圆盒下落放置天车口对应位置,若受光部未接收并检测到投光部发射的光电信号,则表明当前天车窗口暂存位置上已存储了晶圆盒,不可再接收新晶圆盒,否则将引起失误或造成损失。
99.在一种实施示例中,可在通道中设置保护装置,预防晶圆盒在运输中倾斜而发生跌落。
100.如图7至10所示,所述交换运输通道还包括:沿所述运动机构的运动方向设置的保护架4,其中所述保护架4设置于所述运动机构的上方,用于在所述运动机构运输目标晶圆盒时,对所述目标晶圆盒进行防护,预防所述目标晶圆盒因倾斜而掉落。
101.通过设置保护架,可以防止晶圆盒在传送过程中因震动产生倾斜后跌落,并通过两个保护架的连接提高两个天车窗口口箱体悬挂稳定性。
102.在一种实施示例中,可在通道中设置运动机构的封装结构,以将运动装置进行封装保护,既可避免运动机构裸露于外,也可避免外物掉落进运动机构中,也方便通过封装结构将天车窗口部分地悬挂于存储库外侧。
103.如图7至10所示,所述交换运输通道还包括:沿所述运动机构的运动方向设置的箱体(如图中示意的第一箱体8或者第二箱体9),其中所述运动机构设置于所述箱体的内部,所述箱体用于支承所述运动机构,以及使得所述第一暂存舱段和所述运输舱段悬挂于所述存储库的外侧。
104.天车窗口的箱体可以用于承载存储器与空中穿梭小车交换晶圆盒的主体部分,主要呈箱体结构,箱体内部设有运动机构33,箱体上表面设有晶圆盒坐在传动载盘并跟随传动机构运动的凹槽,还设有两个固定的晶圆盒托板位置,可以供晶圆盒在进出储存库或要搭载/下车空中穿梭小车时暂存一定时间,此段时间可提供天车窗口控制器与存储库或空中穿梭小车通讯并沟通进一步任务等等。
105.在一种实施示例中,可将通道的控制装置(如分控盒)悬挂于存储库外侧且位于天车窗口下部。
106.如图7至10所示,所述交换运输通道的分控盒5设置于所述存储库的外侧且位于所述运动机构的下方,既可充分利用好悬空空间,有便于应用部署和后续维护。
107.需要说明的是,分控盒可以包括由电源、信号控制等单元,电源向天车窗口箱体中需要用到电力的电动机、传感器等提供电能,信号控制单元可以提供相关控制信号,这里不对分控盒作限定。
108.在一种实施示例中,可通过悬挂支架将天车窗口的悬空部分悬挂于存储库外侧。
109.如图7、图11至图14所示,所述天车窗口还设置有悬挂支架6,其中所述悬挂支架6的一侧固定于所述存储库的外侧面上,所述悬挂支架6的另一侧用于承托所述交换运输通道,以将所述交换运输通道中的所述第一暂存舱段和所述运输舱段悬挂于所述存储库的外侧。
110.如图11所示,所述悬挂支架包括紧固件61、提起支架杆62和提起支架力托63,其中所述提起支架杆62的一端通过所述紧固件61连接于所述存储库的外侧面,所述提起支架杆62的另一端连接于所述提起支架力托63,所述提起支架力托63用于承托所述交换运输通道的底部以将所述第一暂存舱段和所述运输舱段以悬挂于所述存储库的外侧。
111.如图12所示,所述提起支架力托63在长度方向上设置有若干紧固孔632和若干长条状开槽631,所述紧固孔632用于与所述交换运输通道的底部上设置的固定位置进行连接。
112.实施中,悬挂的提起支架力托63,可采用抽壳结构减轻自身重量,并在与通道的箱体接触面上设有开槽631与紧固孔632,且将用于承托两个天车窗口的通道箱体的开槽631和紧固孔632各自作对称分布,以使整个力托结构受力均衡,对两个通道箱体的支撑力相等,进一步提高悬臂天车口的稳定。
113.实施中,可在悬挂提起支架力托上开设三个开槽631(如图中示意的圆角孔),既可以减轻自身重量,然后开孔位置以中线为基准呈对称分布,当承托两个天车口箱体的时候,天车口箱体持续对悬挂提起支架施加向下的力,孔周围实体部分受力相等,不会因受力时间过长、受力不均匀导致一侧变形,使天车口箱体倾斜而导致晶圆盒在空中倾斜,从而提高整体稳定性。
114.实施中,可在悬挂提起支架力托上设置多个紧固孔632,方便将悬挂提起支架力托与天车口箱体底面通过紧固件连接,紧固孔的位置、数量等以箱体的底面固定需要为基准,并在每个箱体底面宽度内平均分布。
115.如图13所示,所述提起支架杆62包括第一铰接板621、第二铰接板625、第一拉力杆622、第二拉力杆624、连接圆柱环623,其中所述第一拉力杆622的第一端通过所述第一铰接板621与所述紧固件61连接,所述第一拉力杆622的第二端通过所述连接圆柱环623与所述第二拉力杆624的第一端衔接,第二拉力杆624的第二端通过所述第二铰接板625与所述提起支架力托63连接。
116.实施中,将悬挂提起支撑杆分成前述5部分结构件,其中2个高强度铰接板(即第一铰接板621、第二铰接板625)中,一个铰接板与存储库连接,一个铰接板与悬挂提起支架力托连接;高强度拉力杆(即第一拉力杆622、第二拉力杆624),拉力杆是连续受力的主体部
分,所以设计2个圆柱形杆件,两端长度相加等于悬挂提起支架力托与存储库之间的长度,并具有抗拉力强的特点,增加杆件使用寿命,提高天车口稳定性;两杆件使用内孔型紧固连接圆柱环623进行连接。
117.如图14所示,在整体天车口上设有两个悬挂提起支撑杆,分别位于两个天车窗口外侧面,其一端与存储库固接,另一端与悬挂提起支架力托固接,悬挂提起支架杆与悬挂提起支架力托及存储库的夹角设定为预设角度(比如45度),整体支撑呈三角形稳定结构,天车窗口与空中穿梭小车持续传送作业时,天车窗口通道上持续保持支撑4个晶圆盒重量的状态,晶圆盒满载晶圆wafer,从而向悬挂提起支架持续施加重力,通过三角型支撑结构可以稳定提供反向支撑力,使天车窗口稳定悬在存储库半空中传送晶圆盒。
118.基于相同发明构思,本发明还提供一种存储库,该存储库可以与空中运输车交换晶圆盒。
119.在一些实施方式中,如图15至图20所示,所述存储库包括本说明书中前述任意一项实施例中所述的天车窗口,其中所述天车窗口用于供存储库与空中运输车交换晶圆盒。
120.在一些实施方式中,所述存储库包括本说明书中前述任意一项实施例中所述的运输装置,其中运输装置用于供存储库与空中运输车交换晶圆盒。
121.在一些实施方式中,如图21所示,可根据部署需要,将位于存储库两侧的两组双通道的交换运输通道可以设定不同传输功能组合,其中第一组双通道的交换运输通道定义为第一通道a1和第二通道b1,第二组双通道的交换运输通道定义为第三通道a2和第四通道b2,如两组双通道传输机构都是输入或输出模式,或每组双通道机构分别设为输入/输出模式。
122.需要说明的是,本领域的技术人员应当能够理解,在实际部署应用中,存储库的顶部通常是采用封闭结构以保障存储库存储晶圆对环境条件的要求,而为便于图示进行示意和便于对相关说明内容的理解,在本说明书中的存储库相应图示中,顶部封闭结构未示出,未示出部分不应成为对本发明的相关限定。
123.需要说明的是,可根据部署需要将交换运输通道定义为输入通道或者输出通道,这里不加以限定。
124.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例侧重说明的都是与其他实施例的不同之处。尤其,对于后面说明的实施例而言,由于其与前面的实施例是对应的,描述比较简单,相关之处参见在前实施例的部分说明即可。
125.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1