一种天线跟踪方法、装置、设备及存储介质与流程
本申请涉及卫星信号跟踪,具体而言,涉及一种天线跟踪方法、装置、设备及存储介质。
背景技术:
1、在卫星通信领域,如果要实现通信全天候在线,则需要保证相控阵天线实时动态跟踪卫星。
2、为了保证相控阵天线实时动态跟踪卫星,现有技术采用的技术手段主要是提高相控阵天线的接收机性能,通常是采用高精度芯片配合数字信号处理从而提高动态跟踪能力。
3、然而,采用高精度的芯片会导致生产成本较高,硬件复杂化,以及软件处理的复杂化等问题,并且需要在出厂时对相控阵天线的结构进行改进,对于已经在市面上使用的产品,无法实现跟踪能力的提升。
技术实现思路
1、本申请的目的在于提供一种天线跟踪方法、装置、设备及存储介质,可以不用额外设置高成本的硬件设备,通过补偿的方式实现对卫星的跟踪,降低设备成本的同时提高跟踪精度。
2、本申请的实施例是这样实现的:
3、本申请实施例的一方面,提供一种天线跟踪方法,该方法包括:
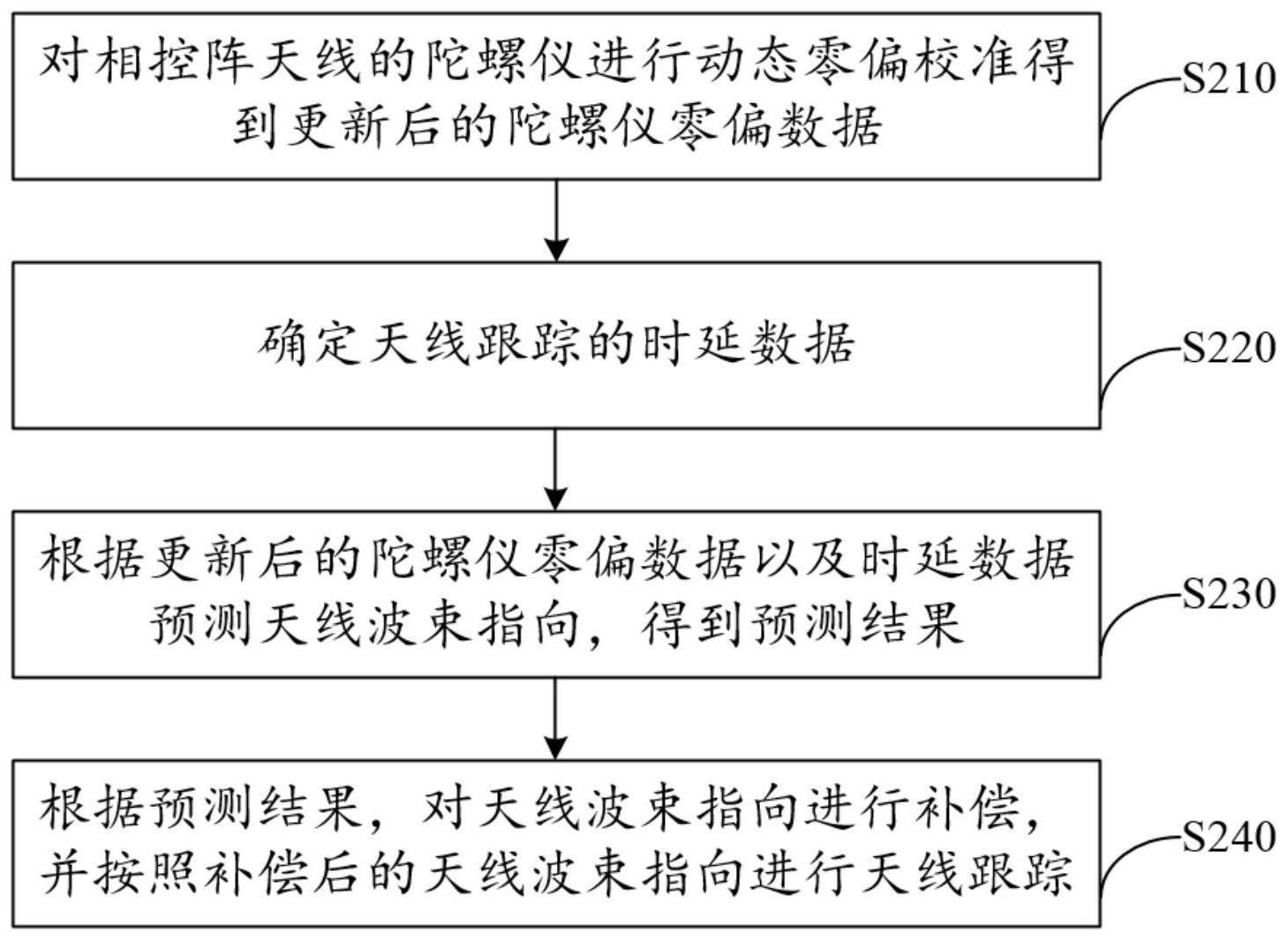
4、对相控阵天线的陀螺仪进行动态零偏校准得到更新后的陀螺仪零偏数据;
5、确定天线跟踪的时延数据,时延数据包括以下至少一项:软件系统时延、惯导时延、指令时延;
6、根据更新后的陀螺仪零偏数据以及时延数据预测天线波束指向,得到预测结果;
7、根据预测结果,对天线波束指向进行补偿,并按照补偿后的天线波束指向进行天线跟踪。
8、可选地,根据更新后的陀螺仪零偏数据以及时延数据预测天线波束指向,得到预测结果,包括:
9、基于更新后的陀螺仪零偏数据以及时延数据预测相控阵天线的角度变化信息,将角度变化信息作为预测结果,角度变化信息包括:航向角变化信息、俯仰角变化信息以及横滚角变化信息。
10、可选地,根据预测结果,对天线波束指向进行补偿,并按照补偿后的天线波束指向进行天线跟踪,包括:
11、根据角度变化信息确定补偿后的天线波束指向,天线波束指向包括:方位角指向以及仰角指向;
12、按照补偿后的天线波束指向进行天线跟踪。
13、可选地,根据角度变化信息确定补偿后的天线波束指向,包括:
14、根据角度变化信息确定相控阵天线的当前姿态旋转矩阵;
15、基于当前姿态旋转矩阵以及当前波束指向的单位矢量确定补偿后的各方向的单位矢量;
16、基于补偿后的各方向的单位矢量得到补偿后的天线波束指向。
17、可选地,基于当前姿态旋转矩阵以及当前波束指向额单位矢量确定补偿后的各方向的单位矢量之前,该方法还包括:
18、基于当前时刻地理坐标系下波束指向的仰角以及方位角确定当前波束指向的单位矢量。
19、可选地,确定天线跟踪的时延数据,包括:
20、响应于用户的输入,得到天线跟踪的时延数据;或者,基于天线的历史执行数据,生成天线跟踪的时延数据。
21、可选地,对相控阵天线的陀螺仪进行动态零偏校准得到更新后的陀螺仪零偏数据,包括:
22、在相控阵天线上电时,采集相控阵天线的陀螺仪数据;
23、计算陀螺仪数据的平均偏移值;
24、确定平均偏移值是否满足预设工作条件;
25、若满足,基于平均偏移值对陀螺仪数据进行更新,得到更新后的陀螺仪零偏数据;
26、若不满足,重新采集相控阵天线的陀螺仪数据,并重新计算平均偏移值,循环执行,直至平均偏移值满足预设工作条件为止。
27、本申请实施例的另一方面,提供一种天线跟踪装置,该装置包括:校准模块、时延模块、预测模块以及补偿模块;
28、校准模块,用于对相控阵天线的陀螺仪进行动态零偏校准得到更新后的陀螺仪零偏数据;
29、时延模块,用于确定天线跟踪的时延数据,时延数据包括以下至少一项:软件系统时延、惯导时延、指令时延;
30、预测模块,用于根据更新后的陀螺仪零偏数据以及时延数据预测天线波束指向,得到预测结果;
31、补偿模块,用于根据预测结果,对天线波束指向进行补偿,并按照补偿后的天线波束指向进行天线跟踪。
32、可选地,预测模块,具体用于基于更新后的陀螺仪零偏数据以及时延数据预测相控阵天线的角度变化信息,将角度变化信息作为预测结果,角度变化信息包括:航向角变化信息、俯仰角变化信息以及横滚角变化信息。
33、可选地,预测模块,具体用于根据角度变化信息确定补偿后的天线波束指向,天线波束指向包括:方位角指向以及仰角指向;按照补偿后的天线波束指向进行天线跟踪。
34、可选地,预测模块,具体用于根据角度变化信息确定相控阵天线的当前姿态旋转矩阵;基于当前姿态旋转矩阵以及当前波束指向的单位矢量确定补偿后的各方向的单位矢量;基于补偿后的各方向的单位矢量得到补偿后的天线波束指向。
35、可选地,预测模块,还用于基于当前时刻地理坐标系下波束指向的仰角以及方位角确定当前波束指向的单位矢量。
36、可选地,时延模块,具体用于响应于用户的输入,得到天线跟踪的时延数据;或者,基于天线的历史执行数据,生成天线跟踪的时延数据。
37、可选地,校准模块,具体用于在相控阵天线上电时,采集相控阵天线的陀螺仪数据;计算陀螺仪数据的平均偏移值;确定平均偏移值是否满足预设工作条件;若满足,基于平均偏移值对陀螺仪数据进行更新,得到更新后的陀螺仪零偏数据;若不满足,重新采集相控阵天线的陀螺仪数据,并重新计算平均偏移值,循环执行,直至平均偏移值满足预设工作条件为止。
38、本申请实施例的另一方面,提供一种计算机设备,包括:存储器、处理器,存储器中存储有可在处理器上运行的计算机程序,处理器执行计算机程序时,实现天线跟踪方法的步骤。
39、本申请实施例的另一方面,提供一种计算机可读存储介质,存储介质上存储有计算机程序,该计算机程序被处理器执行时,实现天线跟踪方法的步骤。
40、本申请实施例的有益效果包括:
41、本申请实施例提供的一种天线跟踪方法、装置、设备及存储介质中,可以对相控阵天线的陀螺仪进行动态零偏校准得到更新后的陀螺仪零偏数据;确定天线跟踪的时延数据;根据更新后的陀螺仪零偏数据以及时延数据预测天线波束指向,得到预测结果;根据预测结果,对天线波束指向进行补偿,并按照补偿后的天线波束指向进行天线跟踪。其中,可以基于更新后的陀螺仪零偏数据以及时延数据更加准确地实现对天线波束指向的预测,进而可以基于预测的趋势进行对应补偿计算,按照补偿后的天线波束指向进行天线跟踪可以提高天线的动态跟踪能力,相应地,上述方式并不需要专门设置高精度芯片,通过补偿的方式即可以实现,节约了成本,降低了硬件的复杂程度,并且可以适用于已经在市面上使用的天线,无需重新进行结构上的改进。
技术特征:
1.一种天线跟踪方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述根据所述更新后的陀螺仪零偏数据以及所述时延数据预测天线波束指向,得到预测结果,包括:
3.如权利要求2所述的方法,其特征在于,所述根据所述预测结果,对天线波束指向进行补偿,并按照补偿后的天线波束指向进行天线跟踪,包括:
4.如权利要求3所述的方法,其特征在于,所述根据所述角度变化信息确定补偿后的天线波束指向,包括:
5.如权利要求4所述的方法,其特征在于,所述基于所述当前姿态旋转矩阵以及当前波束指向额单位矢量确定补偿后的各方向的单位矢量之前,所述方法还包括:
6.如权利要求1所述的方法,其特征在于,所述确定天线跟踪的时延数据,包括:
7.如权利要求1所述的方法,其特征在于,所述对所述相控阵天线的陀螺仪进行动态零偏校准得到更新后的陀螺仪零偏数据,包括:
8.一种天线跟踪装置,其特征在于,所述装置包括:校准模块、时延模块、预测模块以及补偿模块;
9.一种计算机设备,其特征在于,包括:存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现权利要求1至7任一项所述的方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机程序,该计算机程序被处理器执行时,实现权利要求1至7中任一项所述方法的步骤。
技术总结
本申请提供一种天线跟踪方法、装置、设备及存储介质,属于卫星信号跟踪技术领域。该方法包括:对相控阵天线的陀螺仪进行动态零偏校准得到更新后的陀螺仪零偏数据;确定天线跟踪的时延数据,时延数据包括以下至少一项:软件系统时延、惯导时延、指令时延;根据更新后的陀螺仪零偏数据以及时延数据预测天线波束指向,得到预测结果;根据预测结果,对天线波束指向进行补偿,并按照补偿后的天线波束指向进行天线跟踪。本申请可以不用额外设置高成本的硬件设备,通过补偿的方式实现对卫星的跟踪,降低设备成本的同时提高跟踪精度。
技术研发人员:唐前龙,李仕刚,廖飞
受保护的技术使用者:成都天锐星通科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!