一种基于多波长VCSEL激光器的激光雷达系统的制作方法
一种基于多波长vcsel激光器的激光雷达系统
技术领域
1.本发明涉及激光雷达技术领域,特别涉及一种基于多波长vcsel激光器的激光雷达系统。
背景技术:
2.激光雷达是通过发射激光束来探测目标位置、速度等特征量的雷达系统,是一种将激光技术与光电探测技术相结合的先进探测方式。激光雷达因其分辨率高、隐蔽性好、抗有源干扰能力强、低空探测性能好、体积小及重量轻等特点,被广泛应用于无人驾驶、无人机、智能机器人、交通通讯、能源安全检测、资源勘探等领域。
3.依据探测的需要,现有激光雷达系统通常包括单波长激光雷达和多波长激光雷达,传统多波长激光雷达采用单波长激光器+波长转换器的方式,利用波长转换器将单波长激光器的激光光束转换成目标多波长激光光束,这种方法增加了系统成本、复杂度、故障率和维护难度。因此,现有多波长激光雷达通常将多颗不同波长的激光器通过封装(贴片、打线)集成在一起,使其作为具有多种波长的激光发射单元。但是这种通过封装实现集成的方式,占用空间大,封装成本高,封装过程中会带来较大的良率损失,而且还会引入过多的潜在的贴片、打线缺陷,影响整体的可靠性。
4.此外,现有激光雷达系统虽然在三维空间信息获取方面具有突出优点,但由于激光雷达单一波长探测能力的限制,对环境信息中的物性分类、状态等方面的探测能力仍旧有待提高。
技术实现要素:
5.本发明提供一种基于多波长vcsel激光器的激光雷达系统,其主要目的在于解决现有技术存在的问题。
6.本发明采用如下技术方案:一种基于多波长vcsel激光器的激光雷达系统,包括信号发射模块、转镜模块、信号接收模块和数据处理模块,其特征在于:所述信号发射模块包括多波长vcsel激光器,该多波长vcsel激光器包括衬底以及n个堆叠于衬底表面的vcsel单元,n≥2;各所述vcsel单元的波长范围为600-1800nm,且位于下层的vcsel单元的波长大于位于上层的vcsel单元的波长;所述衬底底部设有n型金属电极,位于最上层的vcsel单元顶部设有p型金属电极。
7.进一步,各所述vcsel单元由下至上包括n型dbr、有源区、氧化限制层和p型dbr,且相邻两所述vcsel单元之间设有隧穿结层。
8.更进一步,各所述vcsel单元的n型dbr和p型dbr均是由高折射率薄膜和低折射率薄膜交替构成的周期结构;同一vcsel单元中p型dbr的周期数比n型dbr的周期数少;位于上层的vcsel单元的p型dbr的周期数比位于下层的vcsel单元的p型dbr的周期数少。
9.进一步,各所述vcsel单元由下至上包括底部n型dbr、有源区、掩埋隧穿结和顶部n型dbr,且各所述vcsel单元的掩埋隧穿结的直径均相等,取值范围为5-150μm。
10.更进一步,所述底部n型dbr和顶部n型dbr均是由高折射率薄膜和低折射率薄膜交替构成的周期结构;同一vcsel单元中顶部n型dbr的周期数比底部n型dbr的周期数少;位于上层的vcsel单元的顶部n型dbr的周期数比位于下层的vcsel单元的顶部n型dbr的周期数少。
11.进一步,所述vcsel单元的数量为4个,由下至上堆叠的4个vcsel单元的波长范围分别为1285-1405nm、1025-1095nm、880-950nm和780-850nm。
12.进一步,所述激光雷达系统的探测方法包括如下步骤:s1、通过前置试验获取激光雷达系统的应用场景中不同探测目标在设定波长范围内的光谱反射特性曲线,由此构建反射光谱图库;s2、基于反射光谱图库,以不同探测目标的物性识别为目的,选择n种典型的波长作为所述多波长vcsel激光器的目标波长,并制作该多波长vcsel激光器;s3、通过驱动信号控制所述多波长vcsel激光器同时发射出具有n种不同目标波长的探测激光束;s4、所述探测激光束经所述转镜模块反射后出射;s5、出射后的探测激光束在探测目标上反射后形成回光光束,并返回至转镜模块;s6、信号接收模块接收经转镜模块反射的回光光束,并转换为电信号;s7、所述数据处理模块基于反射光谱图库,对信号接收模块接收到的电信号进行反射光谱匹配,由此实现探测目标的物性识别,达到环境感知的目的。
13.更进一步,所述步骤s1包括如下子步骤:s11、选取激光雷达系统的应用场景中的典型目标物作为探测目标;s12、根据颜色、材质和种类对同一探测目标进行物性分类;s13、通过探测试验获取不同物性的同一探测目标在设定波长范围内的光谱反射特性曲线,并将其存入反射光谱图库中。
14.进一步,所述信号发射模块包括沿光路方向依次设置的所述多波长vcsel激光器、准直光学元件和衍射光学元件,所述多波长vcsel激光器发射出的探测激光束由准直光学元件和衍射光学元件处理后射出。
15.进一步,所述信号接收装置包括沿光路方向设置的滤光片、聚焦透镜和m个探测器,m≥n;经探测目标反射回来的回光光束经滤光片和聚焦透镜处理后由相对应波长的探测器接收。
16.和现有技术相比,本发明产生的有益效果在于:1、本发明将多种不同波长的vcsel单元堆叠集成设计在同一颗vcsel芯片内,相较于现有技术中采用多颗独立设置的vcsel芯片,片内集成的多波长vcsel激光器具有占用空间小、封装成本低、生产效率高、产品良率高和产品可靠性高等优点,为激光雷达实现物性识别的深层次探测提供了必要的技术支持。
17.2、本发明所提供的探测方法能够使激光雷达技术在保留空间高分辨探测能力的同时,实现对环境中物体物性的识别与感知,进一步拓展了激光雷达的应用场景,丰富了激光雷达的探测功能。
附图说明
18.图1为本发明中实施例一的多波长vcsel激光器的结构示意图。
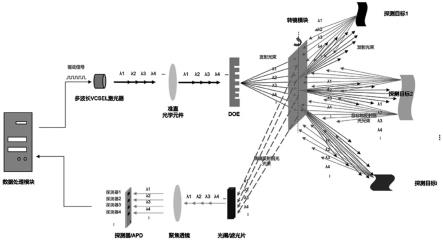
19.图2为本发明中实施例一和实施例二的激光雷达系统的结构示意图。
20.图3为本发明中不同种类的植物的光谱反射特性曲线图。
21.图4为本发明中实施例二的多波长vcsel激光器的结构示意图。
22.图中:10、衬底;11、第一vcsel单元;111、第一n型dbr;112、第一有源区;113、第一氧化限制层;114、第一p型dbr;12、第二vcsel单元;121、第二n型dbr;122、第二有源区;123、第二氧化限制层;124、第二p型dbr;13、第三vcsel单元;131、第三n型dbr;132、第三有源区;133、第三氧化限制层;134、第三p型dbr;14、第四vcsel单元;141、第四n型dbr;142、第四有源区;143、第四氧化限制层;144、第四p型dbr;15、第一隧穿结层;16、第二隧穿结层;17、第三隧穿结层;18、n型金属电极;19、p型金属电极。
23.20、衬底;21、第一vcsel单元;211、第一底部n型dbr;212、第一有源区;213、第一掩埋隧穿结;214、第一顶部n型dbr;22、第二vcsel单元;
221、第二底部n型dbr;222、第二有源区;223、第二掩埋隧穿结;224、第二顶部n型dbr;23、第三vcsel单元;231、第三底部n型dbr;232、第三有源区;233、第三掩埋隧穿结;234、第三顶部n型dbr;24、第四vcsel单元;241、第四底部n型dbr;242、第四有源区;243、第四掩埋隧穿结;244、第四顶部n型dbr;25、第一n型金属电极;26、第二n型金属电极。
具体实施方式
24.下面参照附图说明本发明的具体实施方式。为了全面理解本发明,下面描述到许多细节,但对于本领域技术人员来说,无需这些细节也可实现本发明。
25.实施例一:如图1和图2所示,本发明提供一种基于多波长vcsel激光器的激光雷达系统,为了更清楚地介绍该激光雷达系统的工作原理,以下先对多波长vcsel激光器进行详细介绍:如图1所示,多波长vcsel激光器包括衬底10以及n个堆叠于衬底表面的vcsel单元,n≥2,每个vcsel单元的波长范围为600-1800nm,且位于下层的vcsel单元的波长大于位于上层的vcsel的波长。优选地,本实施例中vcsel单元的数量为4个(即n=4),包括由下至上堆叠的第一vcsel单元11,第二vcsel单元12,第三vcsel单元13和第四vcsel单元14。本发明的主要发明构思在于将激光雷达探测所需的4种不同波长的vcsel单元堆叠集成设计在同一颗vcsel芯片内,使得该vcsel芯片能够发射出激光雷达探测所需的4种探测激光束,由于长波长vcsel单元的材料对应的能带带隙比短波长vcsel单元的材料对应的能带带隙小,因此长波长vcsel单元结构会对短波长vcsel单元的激光有一定的吸收,基于此,本发明的设计原则为:位于下一层的vcsel单元的波长必须大于位于上一层的vcsel单元的波长,以避免沿着激光发射方向的长波长vcsel单元结构对短波长vcsel单元的激光的吸收。
26.如图1所示,衬底10底部设有第一n型金属电极18,第四vcsel单元14顶部设有第二n型金属电极19,如此可通过驱动信号同时控制4个vcsel单元发射出不同波长的探测激光束,以满足激光雷达的探测需求。
27.如图1所示,第一vcsel单元11由下至上包括第一n型dbr111、第一有源区112、第一氧化限制层113和第一p型dbr114;第二vcsel单元12由下至上包括第二n型dbr121、第二有源区122、第二氧化限制层123和第二p型dbr124;第三vcsel单元13由下至上包括第三n型
dbr131、第三有源区132、第三氧化限制层133和第三p型dbr134;第四vcsel单元14由下至上包括第四n型dbr141、第四有源区142、第四氧化限制层143和第四p型dbr144;第一 vcsel单元11和第二vcsel单元12之间设有第一隧穿结层15;第二 vcsel单元12和第三vcsel单元13之间设有第二隧穿结层16,第三vcsel单元13和第四vcsel单元14之间设有第三隧穿结层17。相邻两vcsel单元之间设置隧穿结层能够实现各有源区中多量子阱的串联和电流导通,由此产生高增益,并降低总电容,有利于多波长vcsel激光器的高速调制。
28.如图1所示,本实施例中各隧穿结层的结构均相同,其由下至上包括p型重掺层和n型重掺层。其中,p型重掺层的材料包括但不限于ingaasp、ingaalas、alinas、gaas、algaas、gaassb,n型重掺层的材料包括但不限于algaas、gaas、gainas、inp;p型重掺层掺杂原子包括c、mg、zn或者be,n型重掺层掺杂原子包括se或者te;p型重掺层与n型重掺层掺杂浓度为10
19-10
20
cm-3
数量级;p型重掺层厚度范围为8-50 nm,n型重掺层厚度范围为8-50 nm。
29.如图1所示,第一n型dbr111、第一p型dbr114、第二n型dbr121、第二p型dbr124、第三n型dbr131、第三p型dbr134、第四n型dbr141、第四p型dbr144均是由高折射率薄膜和低折射率薄膜交替构成的周期结构,且周期数由下至上逐渐减小,由此可确保激光器向上出光。
30.如图1所示,衬底10为gaas衬底,基于此,各vcsel单元的n型dbr和p型dbr可采用algaas/gaas、alas/gaas、ingaalas/inp、ingaasp/inp、algainas/alinas半导体材料,各vcsel单元的有源层可设计为多个重叠设置的多量子阱层(mqw),且多量子阱层由gaas、algaas、gaasp和ingaas材料层叠排列而成。
31.如图1所示,本发明创新性地将4种不同波长的vcsel单元堆叠集成设计在同一颗vcsel芯片内,相较于现有技术中采用4颗独立设置的vcsel芯片,本发明具有占用空间小、封装成本低、生产效率高、产品良率高和产品可靠性高等优点,具体表现如下:(1)将4种不同波长的vcsel单元堆叠集成于同一颗vcsel芯片内,可有效减少占位空间,大大节省芯片封装面积,便于满足激光雷达的小型化设计需求。
32.(2)片内集成的多波长vcsel激光器节省了总的芯片制造工序成本、测试成本和封装成本,还省去了现有激光雷达4颗独立的vcsel芯片所需要的耦合器。另外,片内集成的多波长vcsel激光器的故障率低,因此还可节省维修和更换成本。
33.(3)片内集成的多波长vcsel激光器通过一次流片即可完成多种芯片的制造,不需要分多次芯片工艺分别生产每种不同波长的vcsel芯片,可大大减少总的芯片制造工序和时间,成倍提高生产效率。
34.(4)一般来说,单颗vcsel芯片的生产良率只有90%多,而4颗vcsel芯片的累计生产良率更低。因此片内集成的多波长vcsel激光器可大大降低总的生产不良率,提高产品整体的良率。
35.(5)片内集成的多波长vcsel激光器的失效率会比多芯片封装级的失效率低若干个数量级,而且可以大大减少封装贴片和引线键合所引入的潜在缺陷和早期失效,符合可靠性设计的简化设计原则。
36.如图2所示,以下对激光雷达系统的结构进行详细介绍:激光雷达系统包括信号发射模块、转镜模块、信号接收模块和数据处理模块。其中:信号发射模块包括沿光路方向依次设置的多波长vcsel激光器、准直光学元件和
衍射光学元件,多波长vcsel激光器发射出的探测激光束由准直光学元件和衍射光学元件处理后射出。
37.转镜模块转镜模块用于将探测激光束向不同的方向和角度发射出去,同时将来自多个不同方向和角度的目标物反射回光光束中转反射给信号接收模块。本实施例中转镜模块优选为具有多个反射面的多面转镜。
38.信号接收装置包括沿光路方向设置的光阑/滤光片、聚焦透镜和m个探测器,m≥n。具体地,在接收焦平面设置光阑或滤光片可以滤除杂散光,从而只允许对应波长范围的反射回光光束透过,以降低噪声,达到提高信噪比的目的;聚焦透镜可对接收到的回光光束进行聚焦处理,以便对应的探测器接收回光光束。每个探测器用于分别将接收到的对应激光器发出的对应波长的被目标物反射的回波光束信号转换成电信号;如图2和图3所示,以下介绍该激光雷达系统的探测方法,其包括如下步骤:s1、通过前置试验获取激光雷达系统的应用场景中不同探测目标在设定波长范围内的光谱反射特性曲线,由此构建反射光谱图库。具体地,包括如下子步骤:s11、选取激光雷达系统的应用场景中的典型目标物作为探测目标;以智能驾驶的应用场景为例,典型目标大致包括人类、植物、道路、建筑和车辆等。
39.s12、根据颜色、材质和种类对同一探测目标进行物性分类。例如,将应用场景中的车辆分为多种白色、黑色和蓝色等不同的颜色;将应用场景中的道路分为柏油路、土泥路和杂草路等不同材质;将应用场景中的植物分为香樟、广玉兰和石楠等不同的种类。
40.s13、通过探测试验获取不同物性的同一探测目标在设定波长范围内的光谱反射特性曲线,并将其存入反射光谱图库中。图3为通过探测试验获取的不同种类的植物在探测波长范围内的光谱反射特性曲线。根据该图可知,在可见光的550 nm 左右不同种类植物均有一个反射波峰峰,在680nm附近有一个吸收波峰,在680-740 nm之间,红边效应明显,各种植物的反射率急速增加。在近红外区域,道路两旁和道路中间作为绿化隔离带的植物,其反射率基本上处在35%至60%之间。
41.s2、基于反射光谱图库,以不同探测目标的物性识别为目的,选择n中典型的波长作为多波长vcsel激光器的目标波长,并制作该多波长vcsel激光器。以植物的种类识别为例,从图3中可以明确看出,激光雷达的敏感波段范围为780-850 nm,在该波段内,不同种类的植物所呈现出的反射率存在明显的区别。目标波长的选择原则为:在波长数尽可能少的情况下,实现对不同探测目标的物性识别。通过无数次反复试验后发现,在智能驾驶的应用场景中,激光雷达的敏感波段为1285-1405nm、1025-1095nm、880-950nm和780-850nm,这四个波段涵盖了人类、植物、道路、建筑和车辆等典型目标的物性识别所需的波长。因此,本实施中多波长vcsel激光器的vcsel单元数量设置为4个,且由下至上堆叠的4个各vcsel单元的波长分别优选为1310nm、1064nm、905nm和808nm。
42.s3、通过驱动信号控制多波长vcsel激光器同时发射出具有4种不同目标波长的探测激光束,探测激光束由准直光学元件和衍射光学元件处理后射出。
43.s4、探测激光束经多面转镜的其中一个反射面的上部或下部反射后出射。
44.s5、出射后的探测激光束在探测目标上反射后形成回光光束,回光光束经多面转镜的其中一个反射面的下部或上部反射后被信号接收模块接收。
45.s6、回光光束经滤光片和聚焦透镜处理后由相对应波长的探测器接收,并转换为
电信号。
46.s7、数据处理模块基于反射光谱图库,对信号接收模块接收到的电信号进行反射光谱匹配,由此实现探测目标的物性识别,达到环境感知的目的。
47.相较于现有技术,本发明中激光雷达系统具有如下优点:(1)本发明能够使激光雷达技术在保留空间高分辨探测能力的同时,实现对环境中物体物性的识别与感知,进一步拓展了激光雷达的应用场景,丰富了激光雷达的探测功能。
48.(2)本发明中每个探测器只接收与对应激光器的波长相匹配的激光光束,由此能够滤除杂散光,从而避免了同时激活的探测器之间的串扰,并能够同时降低外界环境光(如:太阳光、路灯光等,其波长通常与激光光束的波长不相同)带来的干扰噪声,有效保障激光雷达的信号接收的精度和性能。
49.实施例二:如图4所示,与实施例一不同的是,本实施例中各vcsel单元的外延结构采用掩埋隧穿代替氧化限制层。具体地,第一vcsel21单元由下自上包括第一底部n型dbr211、第一有源区212、第一掩埋隧穿结213和第一顶部n型dbr214;第二vcsel单元22由下自上包括第二底部n型dbr221、第二有源区222、第三掩埋隧穿结223和第二顶部n型dbr224;第三vcsel单元23由下自上包括第三底部n型dbr231、第三有源区232、第三掩埋隧穿结233和第三顶部n型dbr234;第四vcsel单元24由下自上包括第四底部n型dbr241、第四有源区242、第四掩埋隧穿结243和第四顶部n型dbr244。第一掩埋隧穿结213至第四掩埋隧穿结243的直径均相等,取值范围为5-150μm。
50.如图1所示,本发明中掩埋隧穿结的作用包括:其一,通过掩埋隧穿结实现电流限制,从而克服了现有技术中采用氧化限制法所存在的生产良率低和产品一致性差等问题;其二,利用掩埋隧穿结反转了各vcsel单元中顶部n型dbr的极性,使其可替代顶部p型dbr,由此大大减少光损耗和串联电阻,有助于提高转换效率并实现高速运行;其三,用顶部n型dbr替代顶部p型dbr后,还能够克服顶部p型dbr因需要高c掺杂而引入的外延非均匀性,有效提高了外延均匀性和良率。
51.上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此。凡是利用本发明的设计构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1