一种更换电池模组的拉钩机构及电池模组更换方法与流程
本发明涉及动力电池模组自动化更换电池领域,具体为一种更换电池模组的拉钩机构及电池模组更换方法。
背景技术:
1、因车辆在户外行驶,车辆底部电池仓会有泥沙,电池仓偶尔会有磕碰变形,导致电池包和电池仓出现卡顿,更换电池包时,单独采用电磁铁的方式拉取时,电磁铁与电池包贴合不牢固会出现脱离的情况。另外电磁铁长时间使用后,吸力也会衰减,也会出现脱离的情况,因此,现在急需一种更换电池模组的拉钩机构及电池模组更换方法来解决上述出现的问题。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种更换电池模组的拉钩机构及电池模组更换方法,以解决上述背景技术中提出的问题,本发明结构在电磁铁的基础上加入拉钩结构,保障了电池包取出的可靠性,拉力传感器的加入能够对电池包安装拆卸过程进行保护。
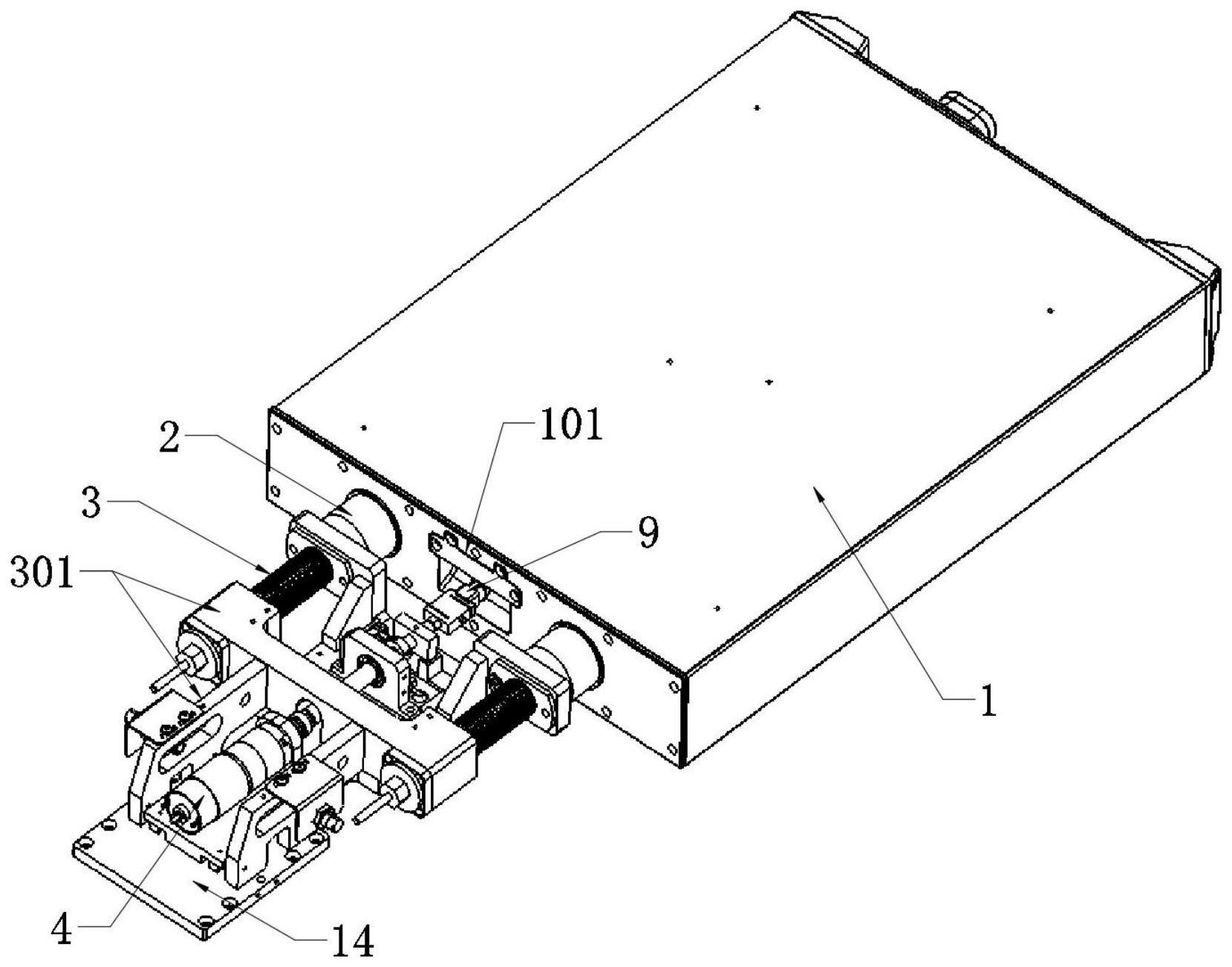
2、为了实现上述目的,本发明是通过如下的技术方案来实现:一种更换电池模组的拉钩机构,包括底板,所述底板上设置有衔接架,所述衔接架上设置有电磁铁,所述底板的底部设置有驱动电缸,所述底板上设置有直流电机,所述直流电机的动力轴上设置有转轴,所述底板上设置有用于检测转轴旋转角度的光电传感器,所述转轴的末端设置有拉力传感器,所述拉力传感器上设置有拉钩,所述电磁铁的触头上设置有接触传感器,所述底板上设置有控制器。
3、进一步地,所述接触传感器、拉力传感器和光电传感器的输出端与控制器的输入端电连接,所述控制器的输出端与电磁铁、直流电机和驱动电缸的输入端电连接。
4、进一步地,所述光电传感器为角度传感器,所述光电传感器上设置有传感器感应支架。
5、进一步地,所述传感器感应支架套设在转轴上,所述传感器感应支架底部与底板固定连接。
6、进一步地,所述直流电机的动力轴与转轴之间设置有联轴器,所述联轴器上设置有联轴器支架,所述联轴器支架的底部与底板固定连接。
7、进一步地,所述衔接架与电磁铁之间设置有弹簧伸缩杆。
8、进一步地,所述底板上设置有支撑转轴旋转的角接触轴承,所述底板上设置有对转轴旋转限位的限位块,所述限位块的旋转限位角度为90°±15°。
9、进一步地,所述转轴中间部位设置有台阶结构,所述台阶结构与角接触轴承相匹配。
10、本发明的另一目的在于提供一种电池模组更换方法,采用上述的一种更换电池模组的拉钩机构,更换方法包括如下步骤:
11、s1、取出电池包:
12、s1-1、通过接触传感器将接触信号发送至控制器,当接触传感器未检测处接触信号,控制器控制直流电机通电带动拉钩旋转,当光电传感器感受到拉钩为0°±15°水平状态,控制器控制直流电机停止转动;
13、s1-2、随后通过控制器驱动电缸驱动底板靠近电池包,直至电磁铁上的接触传感器触及电池包,接触传感器将接触信号发送至控制器,控制器控制驱动电缸停止移动;
14、s1-3、然后控制器控制电磁铁通电,电磁铁产生磁力吸附电池包,同时控制器控制直流电机通电带动拉钩旋转,当光电传感器感受到拉钩为90°±15°垂直状态,控制器控制直流电机停止转动;
15、s1-4、随后控制器控制驱动电缸反向移动,将电池包从电池仓拉取出来,直至驱动电缸反向移动至初始位置;
16、s1-5、然后控制器控制电磁铁断电,同时控制器控制直流电机通电带动拉钩旋转,当光电传感器感受到拉钩为0°±15°水平状态,控制器控制直流电机停止转动;
17、s1-6、取出电池包;
18、s2、塞回电池包:
19、s2-1、将电池包放在电磁铁的触头处,执行步骤s1-2、s1-3;
20、s2-2、然后控制器控制驱动电缸移动,带动电池包移动至电池仓指定位置,控制器控制驱动电缸停止移动,执行步骤s1-5,然后控制器控制驱动电缸反向移动至初始位置。
21、进一步地,当拉力传感器感受到拉力f≥500n,执行步骤s1-5,然后控制器控制驱动电缸反向移动至初始位置。
22、本发明的有益效果:
23、1、拉钩与电磁铁相结合,正常情况下,电磁铁吸附将电池包从电池仓内拉出,当电池包和电池仓配合过紧,电磁铁和电池包出现脱离时,此时拉钩起作用,再将电池包从电池仓拉出,可大大提高拉电池包的成功率;
24、2、拉钩结构采用直流电机驱动的旋转方式,设计光电传感器使直流电机在0°位置和90°位置停止,设计限位块保证转轴停止位置的一致性;
25、3.拉钩结构中安装拉力传感器,设定最大拉力500n,目的是防止拉钩过载将电池包把手处的拉片拉断的情况。
技术特征:
1.一种更换电池模组的拉钩机构,包括底板(14),所述底板(14)上设置有衔接架(301),所述衔接架(301)上设置有电磁铁(2),其特征在于:所述底板(14)的底部设置有驱动电缸(5),所述底板(14)上设置有直流电机(4),所述直流电机(4)的动力轴上设置有转轴(10),所述底板(14)上设置有用于检测转轴(10)旋转角度的光电传感器(11),所述转轴(10)的末端设置有拉力传感器(8),所述拉力传感器(8)上设置有拉钩(9),所述电磁铁(2)的触头上设置有接触传感器,所述底板(14)上设置有控制器。
2.根据权利要求1所述的一种更换电池模组的拉钩机构,其特征在于:所述接触传感器、拉力传感器(8)和光电传感器(11)的输出端与控制器的输入端电连接,所述控制器的输出端与电磁铁(2)、直流电机(4)和驱动电缸(5)的输入端电连接。
3.根据权利要求1所述的一种更换电池模组的拉钩机构,其特征在于:所述光电传感器(11)为角度传感器,所述光电传感器(11)上设置有传感器感应支架(13)。
4.根据权利要求3所述的一种更换电池模组的拉钩机构,其特征在于:所述传感器感应支架(13)套设在转轴(10)上,所述传感器感应支架(13)底部与底板(14)固定连接。
5.根据权利要求1所述的一种更换电池模组的拉钩机构,其特征在于:所述直流电机(4)的动力轴与转轴(10)之间设置有联轴器(6),所述联轴器(6)上设置有联轴器(6)支架,所述联轴器(6)支架的底部与底板(14)固定连接。
6.根据权利要求1所述的一种更换电池模组的拉钩机构,其特征在于:所述衔接架(301)与电磁铁(2)之间设置有弹簧伸缩杆(3)。
7.根据权利要求1所述的一种更换电池模组的拉钩机构,其特征在于:所述底板(14)上设置有支撑转轴(10)旋转的角接触轴承(7),所述底板(14)上设置有对转轴(10)旋转限位的限位块(12),所述限位块(12)的旋转限位角度为90°±15°。
8.根据权利要求7所述的一种更换电池模组的拉钩机构,其特征在于:所述转轴(10)中间部位设置有台阶结构,所述台阶结构与角接触轴承(7)相匹配。
9.一种电池模组更换方法,其特征在于,采用如权利要求1所述的一种更换电池模组的拉钩机构,更换方法包括如下步骤:
10.根据权利要求9所述的一种电池模组更换方法,其特征在于:当拉力传感器(8)感受到拉力f≥500n,执行步骤s1-5,然后控制器控制驱动电缸(5)反向移动至初始位置。
技术总结
本发明提供一种更换电池模组的拉钩机构及电池模组更换方法,涉及动力电池模组自动化更换电池领域,包括底板,底板上设置有衔接架,衔接架上设置有电磁铁,底板的底部设置有驱动电缸,底板上设置有直流电机,直流电机的动力轴上设置有转轴,底板上设置有用于检测转轴旋转角度的光电传感器,转轴的末端设置有拉力传感器,拉力传感器上设置有拉钩,电磁铁的触头上设置有接触传感器,底板上设置有控制器,解决了现有的汽车电池包取出不便的问题,本发明结构在电磁铁的基础上加入拉钩结构,保障了电池包取出的可靠性,拉力传感器的加入能够对电池包安装拆卸过程进行保护。
技术研发人员:刘榴,秦海军,马志乐
受保护的技术使用者:曼弗莱德智能制造(江苏)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!