一种电的开关机构及电的开关的制作方法
1.本实用新型涉及低压电器技术领域,尤其涉及一种实现旋转开关90
°
分合的电的开关机构及电的开关。
背景技术:
2.光伏发电系统中的逆变器里的直流开关,最多具有12组进行层叠组合的旋转开关,在光伏发电系统中发生串联电弧故障时或逆变器内部产生短路故障时,需要自动切除电源,多组层叠组合的旋转开关,可手动进行分开或闭合开关,也可手动闭合开关和由一个电磁执行器打击操作机构中的一个锁扣使跳扣与锁扣分离,使操作机构失去支点作用,在弹簧力的作用下产生一个转动力矩,使开关分离达到分断电源的作用。
3.开关的分合位置以90
°
设置,功能上需求旋转开关在远程分励脱扣器断开触头后,主操作手柄不应阻碍触头的断开,原旋转开关的储能机构不能满足上述需求,本实用新型意在用塑壳断路器的5连杆机构来解决旋转开关断开后与主手柄不关联的要求,但是塑壳断路器的触头转角一般都在30
°‑
60
°
之间,与旋转开关触头旋转90
°
设置无法匹配。
4.传统开关操作机构上,如实现输入和输出均为90度角时,因多连杆操作机构中的过死点角太小,使力矩损失至少50%以上,无法使开关进行分或合的功能。
5.中国实用新型专利申请公开号cn201610997503.x公开了一种断路器,通过优化连杆的工作长度与转轴的铰接点至转轴旋转中心的距离具有预定的比例关系,使得动触头在与静触头断开后形成的动触头转角大于30
°
,该实用新型通过优化杆件可将转角增大至58.5
°
。对于五连杆机构,机构末端连杆转角的加大势必会损失力矩,经计算某塑壳机构的五连杆增大末端连杆转角,转角由60
°
增加到90
°
时,输入力矩传递到连杆末端的力矩由60%下降到20%。力矩传递效率非常低,很难克服旋转开关本身的反力矩。若考虑增大机构的主弹簧力值也会牺牲机构的寿命,得不偿失。
技术实现要素:
6.基于上述背景,为解决上述问题的至少之一,本实用新型提供一种带弹簧的多连杆机构实现了电的开关机构及电的开关,可以实现旋转开关90
°
分合,在保证触头转角大于等于90
°
的情况下,机构的力矩传递效率不降低,开距增加有助于开关分断时灭弧能力的提升,克服上述问题。
7.本实用新型的技术方案如下:
8.本实用新型一方面提供一种电的开关机构,至少包括驱动机构和带弹簧的多连杆机构,所述驱动机构驱动所述带弹簧的多连杆机构做弧线运动输入转变为旋转运动输出,所述带弹簧的多连杆机构包括弧形运动输入端和旋转运动输出端,所述带弹簧的多连杆机构从所述弧线运动输入端至所述旋转运动输出端设置有至少由五个杆件构成的第一连杆结构。
9.优选地,所述带弹簧的多连杆机构设置有上连杆,所述旋转运动输出端至所述上
连杆为至少由五个连杆构成的第二连杆结构。
10.优选地,所述电的开关机构处于脱扣状态时,所述带弹簧的多连杆机构包括一级第一转动副和五连杆机构,或一副连杆和所述五连杆机构;当所述电的开关机构由脱扣状态转变为储能状态时,所述五连杆机构转变为四连杆机构。
11.优选地,所述一级第一转动副与所述五连杆机构的末端杆固定相接,所述一级第一转动副旋转输出放大的转角并减少杆件传动力矩效率的损失。
12.优选地,所述驱动机构设置有至少一个做旋转运动输入转变为驱动所述带弹簧的多连杆机构做弧线运动输出的一级第二转动副。
13.优选地,所述驱动机构设置有至少一个连杆或至少一级第二转动副,也可设置有至少一个连杆和至少一级第二转动副。
14.优选地,所述驱动机构所设置的一级第二转动副与所述驱动机构上的力矩输入驱动轴连接,所述力矩输入驱动轴将输入的力矩直接或间接驱动所述带弹簧的多连杆机构上的一杠杆运动。
15.优选地,所述驱动机构设置的一级第二转动副、所述带弹簧的多连杆机构设置的一级第一转动副可为齿轮传动或链条链轮传动。
16.优选地,所述驱动机构上设置的力矩输入驱动轴与所述带弹簧的多连杆机构上设置的驱动轴可同轴心活动设置也可非同轴心活动设置。
17.优选地,所述驱动机构与所述带弹簧的多连杆机构一体化设置或分体化设置。
18.本实用新型还提供一种电的开关,包括多层开关和所述的电的开关机构,所述电的开关机构驱动所述多层开关转动,实现所述电的开关的闭合或断开。
19.优选地,所述电的开关包括电的驱动器,所述带弹簧的多连杆机构设置有锁扣件和跳扣件,所述跳扣件受所述电的驱动器直接或间接作用下运动。
20.本实用新型的有益效果如下:
21.1.带弹簧的多连杆机构实现了电的开关机构的更大输出转角,有利于增加动触点和静触点之间的开距,开距增加有助于开关分断时灭弧能力的提升;
22.2.本实用新型在结构上采用塑壳的五连杆机构和转动副的设置方案可实现更大的输出转角,改善了现有在塑壳五连杆机构的上直接增大其末端连杆的转角方案力矩传递效率低的问题,采用多连杆机构实现90
°
转角时,传递到末端的力矩与原塑壳机构相同,力矩传递效率基本无损失。
23.3.所述驱动机构的转动副设置为“省力杠杆”,可减小输入端的扭矩,即可减小开关的操作力或力矩。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.图1是示出了本实用新型第一实施例电的开关机构的驱动机构和带弹簧的多连杆机构的轴测图;
26.图2是示出了本实用新型第一实施例驱动机构和带弹簧的多连杆机构杆件连接的轴测图;
27.图3是示出了本实用新型第一实施例带弹簧的多连杆机构杆件脱扣位置的示意图;
28.图4是示出了本实用新型第一实施例带弹簧的多连杆机构储能位置的轴测图;
29.图5是图4的另一角度示意图;
30.图6是示出了本实用新型第一实施例带弹簧的多连杆机构储能时杠杆与第一主动轮与竖直方向角度示意图;
31.图7是示出了本实用新型第一实施例带弹簧的多连杆机构闭合位置的轴测图;
32.图8是图7的另一角度示意图;
33.图9是示出了本实用新型第一实施例带弹簧的多连杆机构闭合时杠杆与第一主动轮与竖直方向角度示意图;
34.图10是示出了本实用新型具体实施例多层开关与电的开关机构轴测图;
35.图11是示出了本实用新型第二实施例带弹簧的多连杆结构的轴测图。
具体实施方式
36.下面将详细描述本实用新型的各个方面的特征和示例性实施例。在下面的详细描述中,提出了许多具体细节,以便提供对本实用新型的全面理解。但是,对于本领域技术人员来说很明显的是,本实用新型可以在不需要这些具体细节中的一些细节的情况下实施。下面对实施例的描述仅仅是为了通过示出本实用新型的示例来提供对本实用新型的更好的理解。本实用新型决不限于下面所提出的任何具体配置,而是在不脱离本实用新型的精神的前提下覆盖了元素、部件任何修改、替换和改进。在附图和下面的描述中,没有示出公知的结构和技术,以便避免对本实用新型造成不必要的模糊。
37.本实用新型提供一种电的开关机构,通过一种多连杆机构来实现在不减少输出力矩的情况下开关触头旋转90
°
,并符合旋转开关的外部操作用手柄做90
°
旋转设置,另外通过多连杆机构来解决旋转开关断开后与主手柄不关联的要求。
38.如图1至图9所示,本实用新型具体实施例的一种电的开关机构1000,用于驱动电的开关的多层开关300运动,所述电的开关机构1000包括驱动机构100 和带弹簧的多连杆机构200,所述驱动机构100能够驱动所述带弹簧的多连杆机构200由做弧形运动输入转变为旋转运动输出,所述驱动机构100包括旋转运动输入端和弧形运动输出端,所述带弹簧的多连杆机构200包括弧形摆动输入端和旋转运动输出端,所述带弹簧的多连杆机构200从所述弧线运动输入端至所述旋转运动输出端设置有至少由五个杆件构成的第一连杆结构,所述旋转运动输出端至所述上连杆202为至少由五个连杆构成的第二连杆结构,所述弧形运动输出端直接或间接与所述弧形运动输入端连接,所述旋转运动输出端直接或间接与所述多层开关300连接并力矩传递,驱动所述多层开关300内部的触头系统的动触头旋转。所述电的开关机构可以实现旋转运动输入和旋转运动输出的转角都为90
°
的同时在力矩传递过程尽量减少力矩损失。
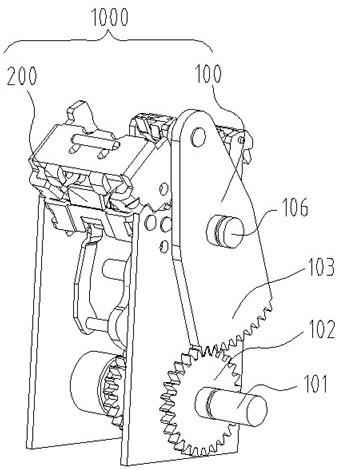
39.请继续参考图1至图4,所述驱动机构100设置有力矩输入驱动轴101、固定轴106和一级第二转动副,所述力矩输入驱动轴101一端与外部操作用的操作手柄连接,另一端与所
述一级第二转动副的一端连接且驱动所述一级第二转动副做往返旋转运动,所述一级第二转动副的另一端设置有第一连接部105,所述第一连接部105与所述带弹簧的多连杆机构200的杠杆201通过连接件230进行力矩的输入,驱动所述杠杆201做弧形运动输入。
40.本实施例中,所述一级第二转动副为齿轮副,其包括第二主动轮102和第二从动轮103,所述第二主动轮102与所述力矩输入驱动轴101固定连接同步运动,所述第二从动轮103与所述固定轴106固定连接,其一端设置有扇形齿,另一端设置有所述第一连接部105,所述第二从动轮103一端的扇形齿与所述第二主动轮102啮合,所述第二主动轮102随所述力矩输入驱动轴101旋转可驱动所述第二从动轮103绕所述固定轴106所在轴线转动,所述第二从动轮103通过第一连接部105、连接件230与所述杠杆201连接,所述第二从动轮103转动带动所述杠杆201做弧形运动,这里所述第二从动轮103为所述的弧形运动输出端,所述杠杆201为所述的弧形运动输入端。
41.其中,所述杠杆201和所述连接件230可一体化设置或分体化设置,一体化设置时,所述杠杆201与所述连接件230可采用冲压拉伸一体成型;所述杠杆 201与所述连接件230分体化设置时,所述杠杆201与所述连接件230可采用焊接、铆接或螺纹连接。
42.如图3至图5所示,本实施例中,所述带弹簧的多连杆机构200包括弹簧、杠杆201、上连杆202、锁扣件203、跳扣件204、下连杆205和一级第一转动副,所述一级第一转动副包括第一主动轮207和第一从动轮209,所述跳扣件204与机架通过轴d铰接,在所述电的开关机构1000处于脱扣状态时,可在所述杠杆 201的驱动下绕轴d转动,所述锁扣件203固定设置在机架上,所述上连杆202 一端与所述跳扣件204通过轴c铰接,另一端与所述下连杆203的一端通过轴b 铰接,所述下连杆203的另一端通过轴a与所述第一主动轮207铰接,所述第一主动轮207通过轴o固定在所述固定板240上。
43.请继续参考图3,在所述电的开关机构100处于脱扣状态时,所述锁扣件203 和所述跳扣件204处于脱离状态,此时所述带弹簧的多连杆机构200由一个五连杆机构和一级第一转动副构成,所述五连杆机构由转轴杆oa、下连杆ab(即下连杆203)、上连杆bc(即上连杆202)、跳扣杆cd和固定杆do组成。由此可见,本实施例的所述带弹簧的多连杆机构200由转轴杆oa、下连杆ab(即下连杆203)、上连杆bc(即上连杆202)、跳扣杆cd、固定杆do和所述一级第一转动副构成,由于一级第一转动副为四连杆机构,且转轴杆oa为所述一级第一转动副与所述五连杆机构的共用杆,因此所述带弹簧的多连杆机构200共有8个连杆。
44.因此,在所述电的开关机构100处于脱扣状态时,第一连杆结构包括由转轴杆oa、下连杆ab、上连杆bc、跳扣杆cd和固定杆do构成的五连杆机构和一级第一转动副,即本实施例中,所述第一连杆结构由8个连杆构成;所述第二连杆结构包括由转轴杆oa、下连杆ab、上连杆bc和固定杆co构成的四连杆机构和一级第一转动副,即本实施例中,所述第二连杆结构由7个连杆构成。
45.当所述电的开关机构100由脱扣状态转换到储能状态时,结合图3和图4,所述杠杆201在所述驱动机构100的作用下做弧形运动输入,所述杠杆201逆时针摆动实现所述带弹簧的多连杆机构储能,所述杠杆201逆时针转动过程中会驱动所述上连杆202逆时针旋转,使所述锁扣件203与所述跳扣件204完成搭扣,这时所述五连杆机构转变成四连杆机构。
46.请参考图4至图9,在所述电的开关机构100处于储能状态和闭合状态时,所述锁扣件203和所述跳扣件204搭扣在一起,所述带弹簧的多连杆机构200 由一个四连杆机构和一
级第一转动副构成,所述四连杆机构由转轴杆oa、下连杆ab(即下连杆203)、上连杆bc(即上连杆202)和固定杆co组成。由此可见,在电的开关机构100处于储能状态和闭合状态时,本实施例的所述带弹簧的多连杆机构200由转轴杆oa、下连杆ab(即下连杆203)、上连杆bc(即上连杆202) 和固定杆co和所述一级第一转动副构成,由于一级第一转动副为四连杆机构,且转轴杆oa为所述一级第一转动副与所述五连杆机构的共用杆,因此所述带弹簧的多连杆机构200共有7个连杆。
47.因此,在所述电的开关机构100处于储能状态和闭合状态时,第一连杆结构包括由转轴杆oa、下连杆ab、上连杆bc和固定杆co构成的四连杆机构和一级第一转动副,所述第一连杆结构由7个连杆构成;所述第二连杆结构包括由转轴杆oa、下连杆ab、上连杆bc和固定杆co构成的四连杆机构和一级第一转动副,所述第二连杆结构由7个连杆构成。
48.需要说明的是,本实施例仅以所述一级第一转动副和所述一级第二转动副为齿轮副结构进行示意性描述,并非限定所述一级第一转动副、所述一级第二转动副为齿轮副,在其他实施例中,所述一级第一转动副和所述一级第二转动副还可以为链条链轮副;同时,本实施例中仅以第一连杆结构在脱扣状态时由8个连杆构成,在储能和闭合状态时由7个连杆构成,第二连杆结构脱扣状态时由7个连杆构成,在储能和闭合状态时由7个连杆构成,这一具体实施例进行示意说明,本实用新型并不对第一连杆结构和第二连杆结构的连杆数量进行限定,在其他具体实施例中,所述第一连杆结构和第二连杆结构还可以为由五个及以上连杆构成的连杆结构,可根据具体的方案灵活设计,可以实现与本实用新型相同的效果。
49.本实施例中,所述五连杆机构中的末端连杆即所述转轴杆oa与所述一级第一转动副固定连接,所述转轴杆oa位于所述从动轮207上,所述第一从动轮209 通过驱动轴208固定在固定板220上,所述第一主动轮207上设置有扇形齿,所述第一主动轮207与所述第一从动轮209啮合,所述转轴杆oa转动可带动所述第一主动轮207转动,所述第一主动轮207转动可驱动所述第一从动轮209转动,从而带动所述驱动轴208转动,所述驱动轴208上设置有第二连接部2081,所述第二连接部2081通过力矩传递直接或间接驱动所述多层开关300转动。
50.如图4至图9所示,当所述带弹簧的多连杆机构由储能位置向闭合位置转换时,所述杠杆201驱动所述上连杆202做顺时针转动,所述四连杆机构的末端连杆即转轴杆oa驱动所述一级第一转动副旋转啮合,完成所述带弹簧的多连杆机构闭合,与此同时,所述一级第一传动副通过力矩传递直接或间接驱动所述多层开关300转动。
51.需要说明的是,在其他实施方式中,所述带弹簧的多连杆机构200还可以包括至少一个五连杆机构和一副连杆,同样可以完成所述带弹簧的多连杆机构的储能和闭合,完成驱动所述多层开关300转动。
52.本实用新型中五连杆机构储能后转变为四连杆机构的运动弧线轨迹为锐角,所述末端连杆驱动所述一级第一转动副啮合,通过设置所述一级第一转动副的传动比来增大旋转输出的转角,输出的转角可为钝角,转角增大可实现多层开关操作90
°
,以图6和图9示例,所述带弹簧的多连杆机构由储能转为闭合过程中,杠杆201转角为38
°
,第一主动轮转角为60
°
,由于第一主动轮和第一从动轮的齿轮传动比为2,因此第一从动轮获得的转角为第一主动轮的2倍,即120
°
,所述带弹簧的多连杆机构200的结构设计实现了增大所述多层开关的触头转角,在保证触头转角大于等于90
°
的情况下,力矩的传递效率基本没有减小,以下为现有五连杆机构和本实用新型多连杆机构在输入相同力矩的情况下,触头转角在60
°
、
90
°
时的输出力矩对比及力矩传递比对比表,具体参见以下表格数据:
[0053][0054]
通过上表数据可以得出,本实用新型多连杆机构在触头转角90
°
时的力矩传递到末端连杆比例和原五连杆的力矩数值基本相符。本实用新型可以解决原五连杆为了实现更大触头转角带来的输出力矩损失问题。
[0055]
本实施例中,所述力矩输入驱动轴101和所述驱动轴208可同轴心活动设置或非同轴心活动设置;所述驱动机构100和所述带弹簧的多连杆机构200可以均固定在固定板240上一体化设置,也可以分别固定在独立的固定板上分体设置,即所述驱动机构固定在第一固定板104上,所述带弹簧的多连杆机构200固定在固定板240上。
[0056]
如图10所示,本实用新型还提供一种电的开关,包括多层开关300、电的驱动器400、至少一个外壳500和所述的电的开关机构1000,所述电的开关机构 1000驱动所述多层开关300转动动,实现所述电的开关的闭合或断开,所述电的开关机构1000和所述驱动器400设置在至少一个外壳500内,所述外壳500 直接或间接设置在所述多层开关300上。所述带弹簧的多连杆机构200设置有锁扣件203和跳扣件204,所述跳扣件204在电的驱动器400直接或间接作用下运动,使所述锁扣203与所述跳扣件204解锁,解锁后四连杆机构变为五连杆机构,所述多层开关300实现分闸。
[0057]
本实用新型还公开第二实施例的电的开关机构,如图11所示,本实施例与第一实施例的区别是,所述五连杆机构的末端连接由第一杆ef、第二杆fg、第三杆gh和第四杆he首尾连接构成的四连杆机构,所述带弹簧的多连杆机构200 由所述五连杆机构和四连杆机构组成,其中,所述第四杆he为五连杆机构和四连杆机构的共用连杆,因此所述带弹簧的多连杆机构200共有8个连杆。本实施例中,第一杆件211为四连杆的机架,第二杆件212为曲柄,第三杆件213为连杆,所述第一杆ef为摇杆,所述五连杆机构的末端驱动四连杆机构运动,所述第三杆件212作旋转运动输出,力矩输出至第二驱动轴214,第二驱动轴214直接或间接驱动多层开关300转动。
[0058]
本实用新型实施例所附图式绘示的结构、比例、大小、数量等,均尽用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实际意义,任何结构的修饰,比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应乃落在本实用新型所揭示的技术内容能涵盖的范围内。当前的实施例在所有方面都被看作是示例性的而非限定性的,本实用新型的范围由所附权利要求而非上述描述定义,并且,落入权利要求的含义和等同物的范围内的全部改变从而都被包括在本实用新型的范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1