一种手动晶圆取出器的制作方法
1.本实用新型属于半导体设备领域,涉及一种手动晶圆取出器。
背景技术:
2.目前,关键尺寸量测设备(cdsem)通常由机器手臂从设备的晶圆进晶圆口拾取晶圆,并将晶圆送至设备的检测口进行检测,当检测完成后,由机器手臂将检测完成的晶圆从设备的检测口送至设备的出晶圆口。但是当机器手臂出现故障,无法使用时,通常需要手动将晶圆从设备中取出,直接用手取出晶圆容易污染晶圆,且设备中取放晶圆的进晶圆口与出晶圆口的空间狭小,直接用手取出晶圆容易造成晶圆破碎及紧急暂停(emo)的情况,进而造成生产损失(mis-operation,简称mo)。
3.因此,急需寻找一种无污染、避免碎片且可以直接代替手来取晶圆的手动晶圆取出器。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种手动晶圆取出器,用于解决现有技术中机械臂不能使用时手动取出测量晶圆关键尺寸设备中的晶圆而造成的晶圆污染及晶圆破损的问题。
5.为实现上述目的及其他相关目的,本实用新型提供了一种手动晶圆取出器,包括:
6.限位框,包括沿x方向相对设置的第一侧壁与第二侧壁,并包括连接于所述第一侧壁与所述第二侧壁之间的底板,所述第一侧壁开设有沿y方向依次设置并相互连通的第一连接孔与第一延伸孔,所述第二侧壁开设有沿y方向依次设置并相互连通的第二连接孔与第二延伸孔,所述y方向与所述x方向均水平设置且相互垂直;
7.载物架,包括连接部、手柄及至少两列齿状延伸部,所述连接部包括伸入所述第一连接孔中的第一端及伸入所述第二连接孔中的第二端,所述齿状延伸部与所述连接部连接并往y方向延伸,所述手柄与所述连接部连接并往负y方向延伸。
8.可选地,所述底板设有缺口,所述缺口沿z方向贯穿所述底板,且所述缺口的开口方向沿y方向,所述齿状延伸部在x-y平面上的垂直投影避开所述缺口,所述z方向垂直于所述x方向及所述y方向。
9.可选地,所述缺口的开口沿x方向的宽度不小于设备中承载晶圆的支架的宽度。
10.可选地,所述第一连接孔的厚度大于所述第一端的厚度,且所述第一连接孔的顶面高于所述第一延伸孔的顶面,所述第一延伸孔中设有第一弹性垫结构;所述第二连接孔的厚度大于所述第二端的厚度,且所述第二连接孔的顶面高于所述第二延伸孔的顶面,所述第二延伸孔中设有第二弹性垫结构;当所述载物架处于抬起状态时,所述第一弹性垫结构的一部分进入所述第一连接孔中以伸入所述第一端下方,所述第二弹性垫结构的一部分进入所述第二连接孔中以伸入所述第二端下方。
11.可选地,所述第一弹性垫结构包括第一弹性部及第一滑块,所述第一弹性部的一
端连接于所述第一延伸孔的远离所述第一连接孔的侧壁,所述第一弹性部的另一端连接于所述第一滑块;所述第二弹性垫结构包括第二弹性部及第二滑块,所述第二弹性部的一端连接于所述第二延伸孔的远离所述第二连接孔的侧壁,所述第二弹性部的另一端连接于所述第二滑块。
12.可选地,所述第一弹性部包括弹簧及弹片中的一种;所述第二弹性部包括弹簧及弹片中的一种。
13.可选地,所述第一侧壁至所述第二侧壁的距离不小于待取晶圆的直径。
14.可选地,所述第一侧壁及所述第二侧壁沿z方向的高度小于设备中取晶圆口及放晶圆口的高度,所述z方向垂直于所述x方向及所述y方向。
15.可选地,所述限位框上还设有手持部。
16.可选地,所述齿状延伸部沿y方向延伸的长度不小于待取晶圆的半径。
17.如上所述,本实用新型的手动晶圆取出器利用一所述限位框限制晶圆的位置,在所述第一侧壁与所述第二侧壁沿y方向上分别依次设置相互连通的第一连接孔和第一延伸孔及相互连通的第二连接孔和第二延伸孔,于所述限位框上设置一与所述限位框通过所述第一连接孔和所述第二连接孔连接的所述载物架,且所述连接部的第一端与第二端分别伸入所述第一连接孔和所述第二连接孔中,于所述第一延伸孔及所述第二延伸孔中分别设置所述第一弹性垫结构及所述第二弹性垫结构,当所述载物架的所述齿状延伸部放置于晶圆下时,抬起所述手柄以使所述载物架向上抬起晶圆,所述第一弹性垫结构及所述第二弹性垫结构垫起所述连接部的所述第一端及所述第二端以防止所述载物架晃动,实现了晶圆的抬起与取出,避免了设备的机器臂不能使用时手动取晶圆易导致晶圆污染及晶圆破损的问题,减少了生产损失,具有高度产业利用价值。
附图说明
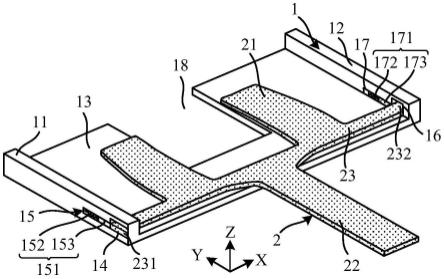
18.图1显示为本实用新型的手动晶圆取出器的立体结构示意图。
19.图2显示为本实用新型的手动晶圆取出器的平面结构示意图。
20.图3显示为本实用新型的手动晶圆取出器的截面结构示意图。
21.元件标号说明
[0022]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
限位框
[0023]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一侧壁
[0024]
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二侧壁
[0025]
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
底板
[0026]
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一连接孔
[0027]
15
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一延伸孔
[0028]
151
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一弹性垫结构
[0029]
152
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一弹性部
[0030]
153
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一滑块
[0031]
16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二连接孔
[0032]
17
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二延伸孔
[0033]
171
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二弹性垫结构
[0034]
172
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二弹性部
[0035]
173
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二滑块
[0036]
18
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缺口
[0037]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
载物架
[0038]
21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
齿状延伸部
[0039]
22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
手柄
[0040]
23
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接部
[0041]
231
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一端
[0042]
232
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二端
具体实施方式
[0043]
以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
[0044]
请参阅图1至图3。需要说明的是,本实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,遂图式中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
[0045]
实施例一
[0046]
本实施例提供一种手动晶圆取出器,如图1、图2及图3所示,分别为所述手动晶圆取出器的立体结构示意图、所述手动晶圆取出器的平面结构示意图及所述手动晶圆取出器的截面结构示意图,所述手动晶圆取出器包括限位框1及载物架2,其中,所述限位框1包括沿x方向相对设置的第一侧壁11与第二侧壁12,并包括连接于所述第一侧壁11与所述第二侧壁12之间的底板13,所述第一侧壁11开设有沿y方向依次设置并相互连通的第一连接孔14与第一延伸孔15,所述第二侧壁12开设有沿y方向依次设置并相互连通的第二连接孔16与第二延伸孔17,所述y方向与所述x方向均水平设置且相互垂直;所述载物架2包括连接部23、手柄22及至少两列齿状延伸部21,所述连接部23包括伸入所述第一连接孔14中的第一端231及伸入所述第二连接孔16中的第二端232,所述齿状延伸部21与所述连接部23连接并往y方向延伸,所述手柄22与所述连接部23连接并往负y方向延伸。
[0047]
具体的,所述限位框1的材质包括塑料或者金属中的一种,也可以是其他适合的材料。
[0048]
具体的,所述限位框1沿y方向的长度不小于晶圆的半径。本实施例中,所述限位框1沿y方向的长度为21.5cm。
[0049]
作为示例,所述底板13上设有缺口18,所述缺口18沿z方向贯穿所述底板13,且所述缺口13的开口方向沿y方向,所述齿状延伸部21在x-y平面上的垂直投影避开所述缺口18,所述z方向垂直于所述x方向及所述y方向。
[0050]
作为示例,所述缺口18的开口沿x方向的宽度不小于设备中承载晶圆的支架的宽度以便于所述手动晶圆取出器能够抬起晶圆。
[0051]
具体的,所述缺口18沿y方向的深度可根据实际情况进行设置,这里不再限制。
[0052]
作为示例,所述第一连接孔14的厚度大于所述第一端231的厚度,且所述第一连接孔14的顶面高于所述第一延伸孔15的顶面,所述第一延伸孔15中设有第一弹性垫结构151;所述第二连接孔16的厚度大于所述第二端232的厚度,且所述第二连接孔16的顶面高于所述第二延伸孔17的顶面,所述第二延伸孔16中设有第二弹性垫结构171;当所述载物架2处于抬起状态时,所述第一弹性垫结构151的一部分进入所述第一连接孔14中以伸入所述第一端231下方,所述第二弹性垫结构171的一部分进入所述第二连接孔16中以伸入所述第二端232下方。
[0053]
具体的,所述第一延伸孔15的尺寸可以根据实际情况进行设置,这里不再限制。
[0054]
具体的,所述第二延伸孔17的尺寸可以根据实际情况进行设置,这里不再限制。
[0055]
具体的,所述第一连接孔14的尺寸可以根据实际情况进行设置,这里不再限制。
[0056]
具体的,所述第二连接孔16的尺寸可以根据实际情况进行设置,这里不再限制。
[0057]
具体的,所述第一滑块153及所述第二滑块173分别伸入所述第一端231与所述第二端232的下方以垫起所述连接部23,继而支撑所述载物架2的抬起,防止所述载物架2晃动,影响取晶圆。
[0058]
作为示例,所述第一弹性垫结构151包括第一弹性部152及第一滑块153,所述第一弹性部152的一端连接于所述第一延伸孔15的远离所述第一连接孔14的侧壁,所述第一弹性部152的另一端连接于所述第一滑块153;所述第二弹性垫结构171包括第二弹性部172及第二滑块173,所述第二弹性部172的一端连接于所述第二延伸孔17的远离所述第二连接孔16的侧壁,所述第二弹性部172的另一端连接于所述第二滑块173。
[0059]
具体的,所述第一滑块153的材质包括塑料及金属中的一种,也可以是其他适合的材料;所述第二滑块173的材质包括塑料及金属中的一种,也可以是其他适合的材料。本实施例中,所述第一滑块153及所述第二滑块173的材质与所述限位框1的材质相同。
[0060]
作为示例,所述第一弹性部152包括弹簧及弹片中的一种,也可以是其他适合的弹性器件;所述第二弹性部172包括弹簧及弹片中的一种,也可以是其他适合的弹性器件。本实施例中,采用弹簧作为所述第一弹性部152及所述第二弹性部172。
[0061]
具体的,在保证所述第一弹性部152于释放状态能够使所述第一滑块153能够伸入所述第一端231的下方以起垫块作用的情况下,所述第一弹性部152的长度可根据实际情况选择,这里不再限制,所述第一滑块153的尺寸可以根据实际情况进行选择,这里不再限制;在保证所述第二弹性部172于释放状态能够使所述第二滑块173能够伸入所述第二端232的下方以起垫块作用的情况下,所述第二弹性部172的长度可根据实际情况选择,这里不再限制,所述第二滑块173的尺寸可以根据实际情况进行选择,这里不再限制。
[0062]
作为示例,所述第一侧壁11至所述第二侧壁12的距离不小于待取晶圆的直径,以使待取晶圆可以进入所述限位槽1内。
[0063]
具体的,在保证待取晶圆能够进入所述限位框1中的情况下,所述第一侧壁11与所述第二侧壁1的厚度可以根据实际情况进行选择,这里不再限制。本实施例中,所述第一侧壁11与第二侧壁12的外侧面之间的距离为33.2cm。
[0064]
作为示例,所述第一侧壁11及所述第二侧壁12沿z方向的高度小于设备中取晶圆口及放晶圆口的高度以使所述限位框1能够进入设备的进晶圆口及设备的出晶圆口,所述z
方向垂直于所述x方向及所述y方向。
[0065]
具体的,在保证所述限位框1能够进入设备的进晶圆口、进入设备的出晶圆口及晶圆安全的情况下,所述第一侧壁11的高度可根据实际情况进行选择,这里不再限制,所述第二侧壁12的高度可根据实际情况进行选择,这里不再限制。
[0066]
具体的,所述底板13沿x方向的长度不小于所述第一侧壁11至所述第二侧壁12之间的距离。本实施例中,所述底板13沿x方向的长度与所述第一侧壁至所述第二侧壁之间的距离相同。
[0067]
具体的,在保证所述手动晶圆取出器能够进入设备的进晶圆口及设备的出晶圆口的情况下,所述底板的13的厚度可以根据实际情况进行设置,这里不再限制。本实施例中,所述第一侧壁11与所述第二侧壁12的上表面至所述底板13的下表面的距离均为3cm,即所述限位框1在z方向的长度为3cm。
[0068]
作为示例,所述限位框1上还设有手持部(未图示),以便于将所述手动晶圆取出器放置于设备中。
[0069]
具体的,所述手持部的尺寸及位置可以根据实际情况进行设置,这里不再限制。
[0070]
具体的,所述载物架2的材质包括塑料及金属中的一种,也可以其他适合的材料。本实施例中,所述载物架2的材质与所述限位框1的材质相同。
[0071]
作为示例,所述齿状延伸部21沿y方向延伸的长度不小于待取晶圆的半径,以使所述齿状延伸部21能够稳定的抬起待取晶圆。
[0072]
具体的,所述齿状延伸部21沿y方向延伸的长度不大于所述底板13于y方向上的长度,以使所述齿状延伸部21在y方向的顶端与所述底板13接触,与所述连接部23在所述连接孔14中的支点共同作用撑起所述载物架2。
[0073]
具体的,所述连接部23的所述第一端231与所述第二端232之间的距离不小于所述第一侧壁11至所述第二侧壁12之间的距离。
[0074]
具体的,在保证所述手柄22承重的前提下,所述手柄22的沿y方向的长度、沿z方向的厚度及沿x方向的宽度可以根据实际情况进行设置,这里不再限制。本实施例中,所述手柄22的厚度为0.8cm。
[0075]
本实施例的手动晶圆取出器通过设置一保护晶圆的所述限位框1以保护晶圆,降低了碎片发生的概率,并通过位于所述限位框1的所述第一侧壁11和所述第二侧壁12沿x方向分别设置的所述第一连接孔14与所述第二连接孔16将所述限位框1与所述载物架2中的所述连接部23连接,设置与所述第一连接孔14相互连通的所述第一延伸孔15及与所述第二连接孔16相互连通的所述第二延伸孔17,并设置可分别伸入所述第一端231与所述第二端232下方的所述第一弹性垫结构151及所述第二弹性垫结构171于所述第一延伸孔15和所述第二延伸孔17中,实现了所述载物架2的稳定抬起晶圆与取出,避免了设备的机器臂不能使用时,手动接触晶圆造成的晶圆的污染及晶圆的破损,减少了生产损失。
[0076]
实施例二
[0077]
本实施例提供一种取出晶圆的方法,所述取出晶圆的方法采用实施例一中所述的手动晶圆取出器取出晶圆。
[0078]
具体的,所述取出晶圆的方法包括以下步骤:
[0079]
s1:打开设备侧门,并用软件打开设备的进晶圆口或者出晶圆口;
[0080]
s2:将手动晶圆取出器伸进所述进晶圆口或者所述出晶圆口内,并置于晶圆的下方,且使晶圆置于所述手动晶圆取出器的限位框中;
[0081]
s3:抬起载物架的手柄以抬起晶圆,并取出承载晶圆的所述手动晶圆取出器。
[0082]
具体的,将所述手动晶圆取出器伸进设备的所述进晶圆口或者设备的所述出晶圆口过程中,需要手持所述限位框的手持部。
[0083]
具体的,抬起所述载物架的所述手柄的同时,所述载物架的连接部上抬,位于延伸孔中的弹性垫结构伸进连接孔中,并垫起所述载物架的所述连接部,以防止所述载物架晃动,所述载物架中的齿状延伸部抬起晶圆。
[0084]
本实施例的取出晶圆的方法通过采用实施例一中所述手动晶圆取出器于设备中取出晶圆,避免了手直接接触晶圆,同时实现了晶圆的取出。
[0085]
综上所述,本实用新型的手动晶圆取出器通过设置一保护晶圆的限位框保护晶圆,降低了碎片发生的概率,于限位框的第一侧壁和第二侧壁沿y方向上分别依次设置相互连通的第一连接孔和第一延伸孔及相互连通的第二连接孔和第二延伸孔,于第一延伸孔及第二延伸孔中分别设置第一弹性垫结构及第二弹性垫结构,并与包括齿状延伸部、连接部及手柄的载物架结合,其中连接部的第一端与第二端分别伸入第一连接孔与第二连接孔中,通过载物架的抬起,第一弹性垫结构与第二弹性垫结构分别伸入第一连接孔和第二连接孔中并垫起载物架的连接部,实现了晶圆的稳定抬起,继而实现了晶圆的取出,同时避免了手接触晶圆造成的晶圆污染,减少了生产损失。所以,本实用新型有效克服了现有技术中的种种缺点而具有高度产业利用价值。
[0086]
上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1