一种自动化绕线系统的制作方法
1.本实用新型涉及自动化设备领域,具体的说是一种自动化绕线系统。
背景技术:
2.目前,民用和军用导线管,导爆管的绕线基本大多属于半自动化,或手动绕线机,在现有绕丝机中,大多数绕丝机实现了绕丝的自动化,但少有实现上下料的自动化,如中国发明专利cn 104609251 a所提及的一种绕线机,其实现了自动化绕线功能,但涉及人工上下料,在线体卷绕时需要压线机构配合完成卷绕,操作步骤繁复,由于人工进行上下料,在大型线体卷绕中工人的劳动强度繁重,如何实现自动化绕线机上下料是绕线系统关键的自动化需求,同时,如何实现绕线机的绕线盘精准穿线剪线是该项发明的难点重点。
3.一般,传统的绕线机系统只是通过丝杆或者马达的来回电机配合电动绕线主轴实现均匀绕线,但绕线机实现全自动化,需要解决传统绕线机系统的,丝料穿孔上料,剪线穿孔下料以及扎线的基本功能。由于人工的上下料频繁参与,尤其是针对中大型的盘类钢丝绕线系统,负重大,危险系数高,很难与自动化工厂其他柔性装备集成。
4.因此,发明一种操作简便、人机交互友好、工作效率高、高度集成化、自动化、智能化、数字化的全自动智能化绕丝机是本领域技术人员亟需解决的问题。
技术实现要素:
5.现为了解决上述技术问题,本实用新型提出了一种自动化绕线系统。本实用新型所要解决的技术问题采用以下技术方案来实现:
6.一种自动化绕线系统,包括框架、输送绕线盘的输送车和对线体进行卷绕的绕线组件,所述绕线盘沿轴线方向设有两组供线体穿过的通孔;
7.还包括:搬运组件,将绕线盘在绕线组件和输送车之间搬运;
8.夹线组件,将线体抬升至与绕线组件同一高度并拉紧防止线体缠绕时松散,同时在绕卷完成后对线体进行减断;
9.穿线组件,将线体首尾两端插入对应的通孔内;
10.限位组件,对输送车位置进行定位保证输送车在搬运组件的抓取范围内。
11.所述搬运组件包括安装在框架上以将绕线盘在绕线组件和输送车之间搬运一号三自由度机械手,所述搬运组件还包括将绕线盘输送入绕线组件进行装夹的输送组件。
12.所述输送组件存放绕线盘的移动部,所述移动部上设有将绕线盘位置固定的卡座,所述框架内安装有带动移动部进行两自由度运动以使绕线盘与绕线组件配合进行绕线的两自由度运动单元。
13.所述夹线组件包括对线体进行承托且沿水平方向对称分布的承载部,所述承载部之间分布有将线体减断的气动钳,所述气动钳沿水平方向的两侧均配合有将线体夹紧以保证切断时线体稳定的夹紧气缸。
14.所述承载部配合有安装在框架内以带动承载部升降以使线体与绕线组件处于同
一高度的一号气缸,所述承载部上均设有对线体进行限位的v形槽。
15.所述穿线组件包括夹取夹线组件内线体输送至绕线组件并将线体穿入通孔内的二号三自由度机械手,所述框架上设有将穿入通孔内的线体端口折弯以固定线体的折弯组件。
16.所述折弯组件包括安装在框架上的三号气缸,所述三号气缸连接有将穿入通孔内的线体端口折弯的折弯压板。
17.所述限位组件包括粘贴在输送车上的颜色标签,所述框架上设有检测颜色标签以对输送车进行粗定位的色标传感器,所述限位组件还包括将输送车抵紧防止输送车在搬运组件工作时发生晃动的压紧组件。
18.所述压紧组件包括安装输送车上的滚轮,所述框架上设有与滚轮抵合以将输送车位置固定的v形座,所述v形座连接有安装在框架上以带动v形座运动的二号气缸。
19.本实用新型的有益效果是:本实用新型通过二号三自由度机械手和折弯压板配合将线体穿入通孔内保证绕卷时线体不会发生脱落,同时通过承载部将线体拉紧,使线体紧贴绕线盘,防止绕卷时线体发生松散;本实用新型通过一号三自由度机械手和输送组件配合实现绕线盘的自动上下料,无需人工进行操作。
附图说明
20.下面结合附图和实施例对本实用新型进一步说明。
21.图1为本实用新型的正视结构示意图;
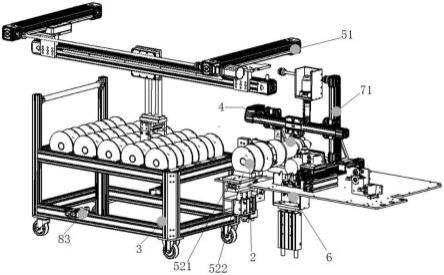
22.图2为本实用新型的立体结构示意图;
23.图3为本实用新型的夹线组件正视结构示意图;
24.图4为本实用新型的夹线组件抬升后正视结构示意图;
25.图5为本实用新型的气动钳立体结构示意图;
26.图6为本实用新型的绕线盘正视结构示意图;
27.图7为本实用新型的输送车俯视结构示意视图;
28.图8为本实用新型的输送组件立体结构示意图;
29.图9为本实用新型的折弯组件立体结构示意图;
30.图10为本实用新型的输送车立体结构示意图;
31.图11为本实用新型的图10中i的放大视图。
32.图中所示:1、框架;2、绕线盘;3、输送车;4、绕线组件;5、搬运组件;6、夹线组件;7、穿线组件;8、限位组件;9、通孔;10、导线组件;51、一号三自由度机械手;52、输送组件;521、移动部;522、卡座;523、两自由度运动单元;61、承载部;62、气动钳;63、夹紧气缸;64、一号气缸;65、v形槽;66、夹紧板;67、转接板;71、二号三自由度机械手;72、折弯组件;721、三号气缸;722、折弯压板;81、颜色标签;82、色标传感器;83、压紧组件;831、滚轮;832、v形座;833、二号气缸;834、导向轮。
具体实施方式
33.为了使本领域的技术人员更好的理解本实用新型的技术方案,下面将结合实施例中的附图,对本实用新型进行更清楚、更完整的阐述,当然所描述的实施例只是本实用新型
的一部分而非全部,基于本实施例,本领域技术人员在不付出创造性劳动性的前提下所获得的其他的实施例,均在本实用新型的保护范围内。
34.如图1至图11所示,一种自动化绕线系统,包括框架1、输送绕线盘2的输送车3和对线体进行卷绕的绕线组件4,所述绕线盘2沿轴线方向设有两组供线体穿过的通孔9;所述框架1上设有输送线体的导线组件10,所述绕线组件4和导线组件10均为成熟技术应用,故不作详细展开;
35.还包括:搬运组件5,将绕线盘2在绕线组件4和输送车3之间搬运;
36.夹线组件6,将线体抬升至与绕线组件4同一高度并拉紧防止线体缠绕时松散,同时在绕卷完成后对线体进行减断;
37.穿线组件7,将线体首尾两端插入对应的通孔9内;
38.限位组件8,对输送车3位置进行定位保证输送车3在搬运组件5的抓取范围内。
39.所述搬运组件5包括安装在框架1上以将绕线盘2在绕线组件4和输送车3之间搬运一号三自由度机械手51,所述搬运组件5还包括将绕线盘2输送入绕线组件4进行装夹的输送组件52。
40.所述输送组件52存放绕线盘2的移动部521,所述移动部521上设有将绕线盘2位置固定的卡座522,所述框架1内安装有带动移动部521进行两自由度运动以使绕线盘2与绕线组件4配合进行绕线的两自由度运动单元523;所述一号三自由度机械手51夹取输送车3内的空载的绕线盘2放置在卡座522上,随后两自由度运动单元523带动移动部521运动,使空载的绕线盘2与绕线组件4配合;绕线完成后,绕线完成的绕线盘2脱离绕线组件4落入卡座522内,两自由度运动单元523带动移动部521复位,一号三自由度机械手51将卡座522内绕线完成的绕线盘2放置入输送车3内,放置完成后,在输送车3内再次夹取空载的绕线盘2放置在卡座522上;所述卡座522可根据绕线盘2大小进行替换。
41.所述夹线组件6包括对线体进行承托且沿水平方向对称分布的承载部61,所述承载部61之间分布有将线体减断的气动钳62,所述气动钳62沿水平方向的两侧均配合有将线体夹紧以保证切断时线体稳定的夹紧气缸63;所述夹紧气缸63均连接有夹紧板66。
42.所述承载部61配合有安装在框架1内以带动承载部61升降以使线体与绕线组件4处于同一高度的一号气缸64,所述承载部61上均设有对线体进行限位的v形槽65;所述一号气缸64连接有转接板67,所述承载部61固定在转接板67沿水平方向的两端,所述气动钳62固定在转接板67中部,所述夹紧气缸63设置有两个,分布在气动钳62沿水平方向的两侧且紧贴气动钳62设置;
43.当需要开始绕线时,导线组件10输送线体至夹紧气缸63处,夹紧气缸63夹紧线体,一号气缸64带动转接板67上升将线体拉紧,同时使线体与绕线组件4同一高度,随后穿线组件7夹取线体,将线体穿入绕线盘2对应的通孔9内;线体穿入通孔9后,一号气缸64带动承载部61复位;卷绕完成后,一号气缸64带动转接板67上升将线体拉紧,同时使线体与绕线组件4同一高度,夹紧气缸63带动夹紧板66将线体夹紧并通过气动钳62将线体剪断,最后,穿线组件7夹取线体,将线体穿入绕线盘2对应的通孔9内。
44.所述穿线组件7包括夹取夹线组件6内线体输送至绕线组件4并将线体穿入通孔9内的二号三自由度机械手71,所述框架1上设有将穿入通孔9内的线体端口折弯以固定线体的折弯组件72;二号三自由度机械手71抓取承载部61上的线体输送给至绕线组件4,并将线
体穿入绕线组件4上的绕线盘2对应的通孔9内。
45.所述折弯组件72包括安装在框架1上的三号气缸721,所述三号气缸721连接有将穿入通孔9内的线体端口折弯的折弯压板722;三号气缸721推动折弯压板722将穿入通孔9内的线体端口折弯,防止线体脱离。
46.所述限位组件8包括粘贴在输送车3上的颜色标签81,所述框架1上设有检测颜色标签81以对输送车3进行粗定位的色标传感器82,所述限位组件8还包括将输送车3抵紧防止输送车3在搬运组件5工作时发生晃动的压紧组件83。
47.所述压紧组件83包括安装输送车3上的滚轮831,所述框架1上设有与滚轮831抵合以将输送车3位置固定的v形座832,所述v形座832连接有安装在框架1上以带动v形座832运动的二号气缸833;所述框架1上设有为输送车3提供导向的导向轮834;颜色标签81粘贴在输送车3车身四周,通过色标传感器82与颜色标签81配合检测输送车3的x方向和y方向的偏差;只要偏差到合格范围内,输送车3停车,二号气缸833推动v形座832与滚轮831抵合,将输送车3锁定,防止一号三自由度机械手51夹取绕线盘2时发生晃动。
48.在本实用新型中,当需要进行绕线时,导线组件10输送线体至夹线组件6,夹紧气缸63夹紧线体,一号气缸64带动转接板67上升将线体拉紧;随后,一号三自由度机械手51夹取输送车3内的空载的绕线盘2放置在卡座522上,两自由度运动单元523使卡座522上空载的绕线盘2与绕线组件4配合;紧接着,二号三自由度机械手71抓取承载部61上的线体输送给至绕线组件4,并将线体穿入绕线组件4上的绕线盘2对应的通孔9内,三号气缸721推动折弯压板722将穿入通孔9内的线体端口折弯,折弯完成后,绕线组件4进行绕线;绕线结束后,一号气缸64带动转接板67上升将线体拉紧,夹紧气缸63带动夹紧板66将线体夹紧并通过气动钳62将线体剪断,二号三自由度机械手71抓取承载部61上的线体输送给至绕线组件4,并将线体穿入绕线组件4上的绕线盘2对应的通孔9内,三号气缸721推动折弯压板722将穿入通孔9内的线体端口折弯;最后,绕线组件4释放绕线完成的绕线盘2至卡座522上,卡座522上复位,一号三自由度机械手51夹取卡座522上绕线完成的绕线盘2至输送车3内。
49.一种自动化绕线方法,该方法包括以下步骤:
50.第一步:输送车3装载未进行绕线的绕线盘2进入框架1,色标传感器82检测到颜色标签81后,输送车3停车,随后二号气缸833带动v形座832与滚轮831抵合将输送车3位置限定;
51.第二步:一号三自由度机械手51将输送车3内未进行绕线的绕线盘2搬运至卡座522上,随后两自由度运动单元523驱动移动部521运动使绕线盘2与绕线组件4配合;
52.第三步:一号气缸64带动承载部61上升使线体与绕线组件4处于同一高度,随后二号三自由度机械手71将承载部61上的线体夹取输送至绕线组件4并将线体起始端穿入对应的通孔9内,紧接着,二号三自由度机械手71复位,三号气缸721带动折弯压板722将线体端口折弯以使线体位置固定;
53.第四步:绕线组件4启动绕线,承载部61复位,绕线结束后,一号气缸64带动承载部61上升使线体与绕线组件4处于同一高度,夹紧气缸63将线体夹紧,随后气动钳62将线体剪断,二号三自由度机械手71将承载部61上的线体夹取输送至绕线组件4并将线体末端穿入对应的通孔9内保证线体首尾均固定;
54.第五步:绕线组件4释放绕线盘2至卡座522上,两自由度运动单元523带动移动部
521复位,一号三自由度机械手51将绕线完成的绕线盘2搬运回输送车3内,并将未进行绕线的绕线盘2搬运至卡座522上,进行绕线作业。
55.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1