多电芯电池模组堆叠机的制作方法
1.本实用新型属于机械设备技术领域,特别涉及一种多电芯电池模组堆叠机。
背景技术:
2.电动车(或称电动汽车)电池模组是由多个电芯(或称电芯单元)叠加到一起组成的,电芯的数量是根据电动车的动力需求和单个电芯的容量来确定的,电芯的堆叠是将一定数量的多个电芯粘接到一起,现有的电芯堆叠多采用人工加工装治具的方式,效率低,且多个电芯并排的整齐度不够理想,还可能在操作过程中将电芯的表面划伤等。
3.因此,本实用新型的目的就是提供一种能够克服上述问题的多电芯电池模组堆叠机。
技术实现要素:
4.本实用新型主要解决的技术问题是提供一种多电芯电池模组堆叠机,能够自动实现多个电芯的整平和压紧贴合,使多个电芯堆叠成一个电池模组。
5.为解决上述技术问题,本实用新型采用的一个技术方案是:本实用新型提供了一种多电芯电池模组堆叠机,包括机台、设于所述机台的堆叠装置和能够驱动所述堆叠装置沿x向平移的平移驱动机构,每一所述堆叠装置装置皆包括底座以及设于所述底座的整平机构和夹紧机构,所述整平机构包括整平板、整平滚轮组件和能够驱动所述整平滚轮组件沿y向平移的滚轮组件驱动单元,所述整平板固定于所述底座,所述整平滚轮组件与所述整平板相对设置,通过所述滚轮驱动单元驱动所述整平滚轮组件沿y向靠近或远离所述整平板;
6.所述夹紧机构包括定夹紧块、动夹紧块和能够驱动所述动夹紧块沿x向平移的夹紧驱动单元,所述定夹紧块固定于所述底座,所述定夹紧块和所述动夹紧块相对设置,通过所述夹紧驱动单元驱动所述动夹块沿x方向靠近或远离所述定夹紧块;
7.所述平移驱动机构包括齿轮、平移驱动电机和齿条,所述平移驱动电机安装与所述底座,所述齿条设于所述机台,所述齿条和所述齿轮啮合,所述平移驱动电机的输出端与所述齿条连接。
8.进一步地说,所述整平滚轮组件包括整平架和安装于所述整平架的一排滚轮,所述滚轮组件驱动单元的输出端与所述整平架连接。
9.进一步地说,所述滚轮的表面包覆一层橡胶或塑胶层。
10.进一步地说,所述整平板为相互独立的隔板,隔板与一排所述滚轮相对应,隔板安装有压力传感器。
11.进一步地说,所述定夹紧块或所述动夹紧块也安装有压力传感器。
12.进一步地说,所述机台的下面安装有机架。
13.进一步地说,所述堆叠机还包括用于将电芯放置于底座的取料机器人。
14.进一步地说,所述堆叠装置设有两组,两组所述堆叠装置平行设置。
15.本实用新型的有益效果是:
16.本实用新型包括包括机台、堆叠装置和平移驱动机构,堆叠装置装置皆包括底座、整平机构和夹紧机构,整平机构包括整平板、整平滚轮组件和滚轮组件驱动单元,夹紧机构包括定夹紧块、动夹紧块和夹紧驱动单元;通过滚轮驱动单元驱动整平滚轮组件沿y向靠近整平板将多个电芯整平对齐,使其处于同一条直线上,并通过夹紧驱动单元驱动动夹块沿x方向靠近定夹紧块,再加上电芯侧面原本具有的粘胶,从而将多个电芯堆叠成一个电池模组;因此,本实用新型能够自动实现多个电芯的整平和压紧贴合,使多个电芯堆叠成一个电池模组;
17.再者,本实用新型的滚轮的表面包覆一层橡胶或塑胶层,在与整平板配合将电芯整平时,对电芯起到缓冲保护的作用,避免电芯表面碰划伤。
18.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
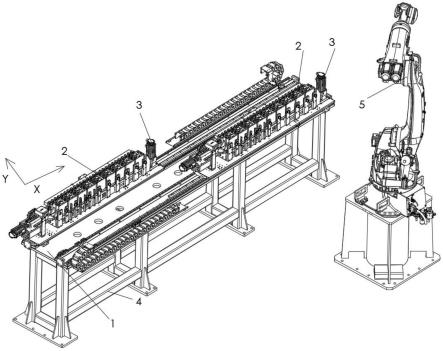
19.图1是本实用新型的结构示意图;
20.图2是本实用新型的堆叠装置的结构示意图;
21.图3是本实用新型的其中一堆叠装置的结构示意图之一(放置电芯);
22.图4是本实用新型的其中一堆叠装置的结构示意图之二(从一角度看);
23.图5是本实用新型的其中一堆叠装置的结构示意图之三(从另一角度看);
24.图6是本实用新型的其中一堆叠装置的结构示意图之四(从又一角度看);
25.附图中各部分标记如下:
26.机台1;
27.堆叠装置2、底座21、整平板221、整平滚轮组件222、整平架2221、滚轮2222、滚轮组件驱动单元223、定夹紧块231、动夹紧块232、夹紧驱动单元233;
28.平移驱动机构3、齿轮31、平移驱动电机32、齿条33;
29.机架4、取料机器人5、压力传感器6;
30.电芯100。
具体实施方式
31.以下通过特定的具体实施例说明本实用新型的具体实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本实用新型的优点及功效。本实用新型也可以其它不同的方式予以实施,即,在不背离本实用新型所揭示的范畴下,能予不同的修饰与改变。
32.实施例:一种多电芯电池模组堆叠机,图1到图6所示,包括机台1、设于所述机台的堆叠装置2和能够驱动所述堆叠装置沿x向平移的平移驱动机构3,每一所述堆叠装置装置皆包括底座21以及设于所述底座的整平机构和夹紧机构,所述整平机构包括整平板221、整平滚轮组件222和能够驱动所述整平滚轮组件沿y向平移的滚轮组件驱动单元223,所述整平板固定于所述底座,所述整平滚轮组件与所述整平板相对设置,通过所述滚轮驱动单元驱动所述整平滚轮组件沿y向靠近或远离所述整平板;
33.所述夹紧机构包括定夹紧块231、动夹紧块232和能够驱动所述动夹紧块沿x向平移的夹紧驱动单元233,所述定夹紧块固定于所述底座,所述定夹紧块和所述动夹紧块相对设置,通过所述夹紧驱动单元驱动所述动夹块沿x方向靠近或远离所述定夹紧块;
34.所述平移驱动机构包括齿轮31、平移驱动电机32和齿条33,所述平移驱动电机安装与所述底座,所述齿条设于所述机台,所述齿条和所述齿轮啮合,所述平移驱动电机的输出端与所述齿条连接。
35.本实施例中,所述夹紧驱动单元为电机,但不限于此。
36.所述整平滚轮组件包括整平架2221和安装于所述整平架的一排滚轮2222,所述滚轮组件驱动单元的输出端与所述整平架连接。本实施例中,所述滚轮组件驱动单元为气缸,但不限于此。
37.所述滚轮的表面包覆一层橡胶或塑胶层。具有一定弹性,缓冲,避免划伤电芯表面,也避免将电芯压坏。
38.所述整平板为相互独立的隔板,隔板与一排所述滚轮相对应,隔板安装有压力传感器6。
39.所述定夹紧块或所述动夹紧块也安装有压力传感器。
40.所述机台的下面安装有机架4。
41.如图1所示,所述堆叠机还包括用于将电芯100放置于底座的取料机器人5。
42.所述堆叠装置设有两组,两组所述堆叠装置平行设置。与下游制程更好的衔接,减少等待时间,提高效率。
43.本实用新型的工作原理和工作过程如下:
44.通过取料机器人将上游制程的电芯依次放入堆叠装置的底座(能够放入电芯的数量,根据电池模组的需要来设置,比如本实施例中,能够放入9个电芯单元,每个电芯单元两个电芯,其中每一电芯单元的一侧面是覆盖粘胶),通过滚轮驱动单元驱动整平滚轮组件沿y向靠近整平板,将电芯整理整齐,且安装于整平板的压力传感器能够采集该方向的压紧力;通过夹紧驱动单元驱动动夹块沿x方向靠近定夹紧块,将所有电芯夹紧堆叠成一个电池模组,相邻电芯单元之间通过粘胶粘到一起,且安装在动夹块的压力传感器能够采集该方向的压紧力;之后,夹紧驱动单元和整平驱动单元回位即可;
45.为了与下游制程的衔接,还可以通过平移驱动机构将该堆叠装置沿x向移动至合适位置;同时,另一堆叠装置正进行电芯堆叠的过程,通过两组堆叠装置减少等待时间,提高效率。
46.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1