晶圆移动工作台的制作方法
1.本实用新型涉及工作台领域,特别是涉及一种晶圆移动工作台。
背景技术:
2.晶圆指制作硅半导体电路所用的硅晶片,其原始材料是硅。高纯度的多晶硅溶解后掺入硅晶体晶种,然后慢慢拉出,形成圆柱形的单晶硅。硅晶棒在经过研磨,抛光,切片后,形成硅晶圆片,也就是晶圆。
3.市面上晶圆在加工或测试过程中,需要进行在xy平面上移动作业,使晶圆能够配合视觉影像等构件协同工作。市面上的晶圆移动工作台一般结构较为复杂,成本较高。
技术实现要素:
4.基于此,有必要提供一种晶圆移动工作台,降低晶圆移动工作台的成本。
5.一种晶圆移动工作台,包括:
6.晶圆夹持结构,用于卡持晶圆;及
7.调节机构,所述调节机构连接于所述晶圆夹持结构,所述调节机构用于调节所述晶圆夹持结构的位置,以实现所述晶圆夹持结构沿第一方向和第二方向的移动。
8.以上晶圆移动工作台,晶圆夹持结构用于卡持晶圆,调节机构连接于晶圆夹持结构,调节机构用于调节晶圆夹持结构的位置,以实现晶圆夹持结构沿第一方向和第二方向的移动。相比于全自动移动设备,上述晶圆移动工作台的结构相对简单,成本相对较低。
9.在其中一个实施例中,所述第一方向与所述第二方向相互垂直。
10.在其中一个实施例中,所述调节机构包括第一调节组件和第二调节组件;所述第一调节组件连接于所述第二调节组件并用于调整所述第二调节组件在所述第一方向的位置,所述第二调节组件连接于所述晶圆夹持结构并用于调整所述晶圆夹持结构在所述第二方向的位置。
11.在其中一个实施例中,所述晶圆移动工作台包括底座,所述第一调节组件包括第一驱动机构和第一导轨,所述第一驱动机构连接于所述底座及所述第二调节组件,所述第一导轨连接于所述底座,且所述第一导轨的长度方向与所述第一方向平行,所述第一驱动机构用于驱动所述第二调节组件沿所述第一导轨移动。
12.在其中一个实施例中,所述第一驱动机构包括第一皮带、第一带轮和第一马达,所述第一带轮和所述第一马达分别连接于所述底座,所述第一皮带连接于所述第一马达的输出端及所述第一带轮,且所述第二调节组件连接于所述第一皮带,所述第一马达用于通过所述第一皮带带动所述第二调节组件移动。
13.在其中一个实施例中,所述第二调节组件包括第二驱动机构、承板和第二导轨,所述第二导轨固定连接于所述承板,且所述第二导轨的长度方向与所述第二方向平行,所述晶圆夹持结构可滑动地设置于所述第二导轨,所述承板可滑动地设置于所述第一导轨,所述第二驱动机构连接于所述承板及所述晶圆夹持结构,以驱动所述晶圆夹持结构沿所述第
二导轨移动。
14.在其中一个实施例中,所述第二驱动机构包括第二皮带、第二带轮和第二马达,所述第二带轮和所述第二马达分别连接于所述承板,所述第二皮带连接于所述第二马达的输出端及所述第二带轮,且所述晶圆夹持结构连接于所述第二皮带,所述第二马达用于通过所述第二皮带带动所述晶圆夹持结构移动。
15.在其中一个实施例中,所述晶圆夹持结构包括托板和连接于所述托板的定位件,所述托板开设有卡盘孔,所述托板可滑动地设置于所述第二导轨,所述定位件设于所述卡盘孔的边缘,所述定位件用于与所述晶圆边缘的缺口相卡合,以用于所述晶圆在所述托板的限位。
16.在其中一个实施例中,所述晶圆夹持结构包括第三导轨,所述第三导轨连接于所述托板并用于调整所述晶圆在所述第一方向的位置。
17.在其中一个实施例中,所述晶圆夹持结构包括连接板,所述连接板可拆卸地连接于所述托板,且所述连接板可滑动地设于所述第二调节组件。
附图说明
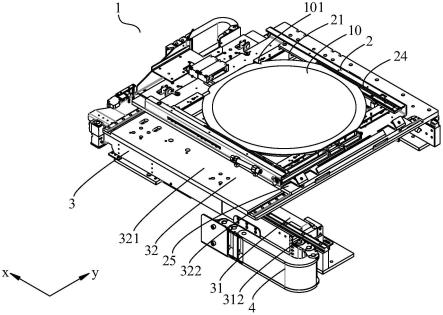
18.图1为一实施例的安装有晶圆的晶圆移动工作台的示意图;
19.图2为一实施例的晶圆移动工作台的示意图;
20.图3为一实施例的晶圆夹持结构的示意图;
21.图4为一实施例的调节机构的示意图;
22.图5为一实施例的第二驱动机构的示意图;
23.图6为一实施例的第一调节组件的示意图。
24.附图标记:
25.1、晶圆移动工作台
ꢀꢀꢀ
10、晶圆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101、缺口
26.2、晶圆夹持结构
ꢀꢀꢀꢀꢀ
21、托板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22、定位件
27.23、卡盘孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24、第三导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25、连接板
28.3、调节机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31、第一调节组件
ꢀꢀꢀꢀꢀꢀ
311、第一驱动机构
29.3111、第一皮带
ꢀꢀꢀꢀꢀꢀ
3112、第一带轮
ꢀꢀꢀꢀꢀꢀꢀꢀ
3113、第一马达
30.312、第一导轨
ꢀꢀꢀꢀꢀꢀꢀ
32、第二调节组件
ꢀꢀꢀꢀꢀꢀ
321、承板
31.322、第二导轨
ꢀꢀꢀꢀꢀꢀꢀ
323、第二驱动机构
ꢀꢀꢀꢀꢀ
3231、第二皮带
32.3232、第二带轮
ꢀꢀꢀꢀꢀꢀ
3233、第二马达
ꢀꢀꢀꢀꢀꢀꢀꢀ
4、底座
具体实施方式
33.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳的实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型的公开内容的理解更加透彻全面。
34.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
35.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
36.参阅图1和图2,本实用新型公开了一种晶圆移动工作台1,晶圆移动工作台1可在晶圆10加工或测试过程中,将晶圆10通过晶圆移动工作台1安装在固晶设备上,且安装在固晶设备的晶圆10可以被拾取头吸取,并在视觉影像设备例如相机等的配合下执行对位和固晶工作。在此过程中,晶圆移动工作台1可以驱使晶圆10在平面上沿第一方向和第二方向的运动,以配合视觉影像设备和拾取头协同工作。在图1和图2中,以第一方向为x轴,第二方向为y建立直角坐标系,且x、y坐标轴方向垂直。晶圆移动工作台1包括晶圆夹持结构2和调节机构3,晶圆夹持结构2用于卡持晶圆10,以使在晶圆10加工或者测试过程中,晶圆10与晶圆夹持结构2的位置相对固定。调节机构3连接于晶圆夹持结构2,在一些实施方式中,调节机构3设置于晶圆夹持结构2下方,调节机构3用于调节晶圆夹持结构2的位置,实现晶圆夹持结构2沿第一方向(x轴)和第二方向(y轴)的移动。
37.上述晶圆移动工作台1,晶圆夹持结构2用于卡持晶圆10,调节机构3连接于晶圆夹持结构2,调节机构3用于调节晶圆夹持结构2的位置,以实现晶圆夹持结构2沿第一方向(x轴)和第二方向(y轴)的移动。相比于全自动移动设备,上述晶圆移动工作台1的结构相对简单,成本相对较低。
38.参考图1和图2,在一些实施方式中,晶圆移动工作台1包括底座4,底座4可设置于晶圆夹持结构2和调节机构3的下方且连接于调节机构3,底座4用于支撑晶圆夹持结构2和调节机构3。
39.参考图1、图4、图5和图6,在一些实施方式中,调节机构3包括第一调节组件31和第二调节组件32,第一调节组件31连接于第二调节组件32,第一调节组件31工作时,可以调整第二调节组件32在第一方向的位置,第二调节组件32连接于晶圆夹持结构2,第二调节组件32工作时,可以调整晶圆夹持结构2在第二方向的位置。具体地,第一方向和第二方向可以相互垂直。在一些实施方式中,可以先调节第一调节组件31,第一调节组件31带动第二调节组件32在第一方向上移动,移动到合适位置时,调节第二调节组件32,第二调节组件32带动晶圆夹持结构2在第二方向上移动,进而达到调节晶圆夹持结构2的效果。
40.参考图4,在一些实施方式中,第一调节组件31包括第一驱动机构311和第一导轨312,第一驱动机构311连接底座4及第二调节组件32,第一导轨312连接于底座4,第一驱动机构311用于驱动第二调节组件32沿第一导轨312移动。
41.在一些实施方式中,第一驱动机构311包括第一皮带3111、第一带轮3112和第一马达3113,第一带轮3112连接于底座4且能够相对底座4转动。第一马达3113连接于底座4,第一皮带3111连接于第一马达3113的输出端及第一带轮3112,第一皮带3111张紧于第一带轮3112和第一马达3113的输出端之间,依靠第一皮带3111与第一带轮3112之间、以及第一皮带3111与第一马达3113的输出端之间的摩擦力,第一马达3113即可带动第一皮带3111绕第一马达3113的输出端与第一带轮3112运动。第二调节组件32连接于第一皮带3111,进而可通过第一马达3113带动第二调节组件32移动。
42.第一导轨312连接于底座4,第一导轨312的长度方向与第一方向平行,当第一驱动机构311运行时,由第一导轨312保证第二调节组件32的正确运动轨迹,即第一方向。换言之,第一驱动机构311驱动第二调节组件32在第一导轨312移动,移动方向是第一方向,实现了第二调节组件32在第一方向上的移动,进而实现了晶圆夹持结构2在第一方向上的移动。
43.参考图2和图4,在一些实施方式中,第二调节组件32包括承板321和第二导轨322,承板321可滑动地设置于第一导轨312上,承板321能够在第一导轨312上沿第一方向滑动。第二导轨322固定连接于承板321,第二导轨322的长度方向与第二方向平行,第一导轨312用于承载承板并为承板321在第一方向的移动导向,第二导轨322承载晶圆夹持结构2并为晶圆夹持结构2在第二方向的移动导向。在一些实施方式中,晶圆夹持结构2可滑动地设置于第二导轨322,晶圆夹持结构2可以在第二导轨322上滑动,实现了晶圆夹持结构2在第二方向上的移动。
44.参考图5,在一些实施方式中,第二调节组件32包括第二驱动机构323,第二驱动机构323连接于承板321及晶圆夹持结构2,第二驱动机构323用于驱动晶圆夹持结构2在第二导轨322上移动。在一些实施方式中,第二驱动机构323包括第二皮带3231、第二带轮3232和第二马达3233,第二带轮3232转动连接于承板321且能够相对承板321转动。第二马达3233固定连接于承板321,第二皮带3231连接第二马达3233的输出端及第二带轮3232,第二皮带3231张紧于第二带轮3232和第二马达3233的输出端之间,依靠第二皮带3231与第二带轮3232之间、以及第二皮带3231与第二马达3233的输出端之间的摩擦力,第二马达3233即可带动第二皮带3231绕第二马达3233的输出端与第二带轮3232运动。第二皮带3231连接于晶圆夹持结构2,进而带动晶圆夹持结构2在第二导轨322上沿第二方向移动。
45.在一些实施方式中,参考图1和图3,晶圆夹持结构2可滑动地设置于第二调节组件32的第二导轨上,晶圆夹持结构2包括托板21和定位件22,托板21可滑动地设置于第二导轨322上,托板21能够在第二导轨322上沿第二方向滑动,定位件22连接于托板21,托板21上设有卡盘孔23,定位件22设置在卡盘孔23的边缘。晶圆10在生产中过程中,人们为了方便让设备对于晶圆10进行定位,通常会在晶圆10上设置有缺口101。在一些实施方式中,定位件22可以用于与晶圆10边缘的缺口101相卡合,实现晶圆10在托板21上的限位,起到固定晶圆10位置的作用。
46.在一些实施方式中,在托板21上设有第三导轨24,第三导轨24的延伸方向与第一方向平行,第三导轨24用于调整晶圆10在第一方向的位置,在操作使用时,可以手动将晶圆10放置在第三导轨24上,晶圆10沿第三导轨24滑动,当晶圆10边缘的缺口101刚好滑动到卡盘孔23位置时,停止滑动晶圆10,用定位件22卡合晶圆10边缘的缺口101,将晶圆10固定在托板21上,以实现晶圆10在托板21上的位置固定。
47.在一些实施方式中,定位件22可以设置为两个以上,设置两个定位件22相较于设置一个定位件22,能够更牢固地固定晶圆10相对托板21的位置。市场上一般晶圆10尺寸分为6英寸、8英寸、12英寸等规格,不同规格晶圆10上缺口101位置也不相同,在一些实施方式中,可以针对不同规格的晶圆10,设计不同规格的托板21,使得晶圆10移动工作台1能够适配不同规格的晶圆10。
48.在一些实施方式中,晶圆夹持结构2包括连接板25,连接板25可以设置在托板21的下方,连接板25连接于托板21,连接板25可滑动地设于第二调节组件32的第二导轨322。为
适配不同规格晶圆10,在托板21上设置连接板25,连接板25与托板21可拆卸地连接,当晶圆移动工作台1使用过程中需要更换晶圆10规格时,通过将托板从连接板25拆卸并更换另一个适合相应规格晶圆10的托板21即可。
49.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
50.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1