一种极耳找正装置的制作方法
1.本实用新型涉及电池制造设备技术领域,特别是涉及一种极耳找正装置。
背景技术:
2.在电池制造过程中,常常需要对电池上的极耳进行处理。例如:在电池注液完成后,电池的极耳上容易残留有电解液,残留的电解液会对后续的焊接等工序造成不良影响,因此在注液完成后需要对电池的极耳进行清洗。为了方便清洗机构能够准确地找到极耳位置并进行清洗,需要在清洗之前需要利用极耳找正装置对电池的极耳进行找正,保证电池的极耳朝向指定方向。
3.然而,现有的极耳找正装置各个执行机构的动作分别利用气缸或电机等驱动件独立驱动,各个执行机构的动作响应速度不一,使得各个执行机构之间的动作协同性较差,容易导致各个机构的动作不协调,使得电池与设备部件容易发生碰撞而造成损坏。
技术实现要素:
4.基于此,有必要针对现有技术中各个执行机构的动作响应速度不一,使得各个执行机构之间的动作协同性较差,容易导致各个机构的动作不协调,使得电池与设备部件容易发生碰撞而造成损坏的问题,提供一种改善上述缺陷的极耳找正装置。
5.一种极耳找正装置,包括:
6.第一定位机构,包括第一机架以及沿第一方向可移动地连接在所述第一机架上的第一定位组件,所述第一定位组件具有第一从动滚轮;
7.第一找正机构,包括第二机架以及沿所述第一方向可移动地连接在所述第二机架上的第一找正组件,所述第一找正组件具有与所述第一从动滚轮沿所述第一方向相对布设的第一主动滚轮,所述第一主动滚轮与所述第一从动滚轮之间形成供电池途经的第一找正工位;及
8.驱动机构,包括驱动轴、旋转驱动件、第一传动组件及第二传动组件;所述驱动轴与所述旋转驱动件驱动连接,以由所述旋转驱动件驱动旋转;所述第一传动组件传动连接在所述驱动轴与所述第一定位组件之间,所述第二传动组件传动连接在所述驱动轴与所述第一找正组件之间;所述第一传动组件和所述第二传动组件用于将所述驱动轴的旋转运动,转化成所述第一定位组件与所述第一找正组件沿所述第一方向彼此靠近或远离的运动;
9.其中,所述第一定位组件与所述第一找正组件彼此靠近移动的过程中,能够带动所述第一从动滚轮与所述第一主动滚轮夹紧所述电池,所述第一主动滚轮用于带动被夹紧的所述电池旋转。
10.在其中一个实施例中,所述第一传动组件包括第一支撑架、第一摆臂、第一凸轮结构及第一连杆结构,所述第一摆臂具有第一端和第二端,所述第一端可转动地连接在所述第一支撑架上;
11.所述第一凸轮结构传动连接在所述驱动轴与所述第一摆臂之间,以将所述驱动轴的旋转运动转化成所述第一摆臂绕所述第一端的摆动运动;所述第一连杆结构传动连接在所述第一摆臂与所述第一定位组件之间,以将所述第一摆臂的摆动运动转化成所述第一定位组件沿所述第一方向的移动。
12.在其中一个实施例中,所述第一凸轮结构包括第一凸轮及第一滚轮,所述第一凸轮安装在所述驱动轴上,以与所述驱动轴同步旋转;所述第一滚轮安装在所述第一摆臂上,并与所述第一凸轮滚动配合。
13.在其中一个实施例中,所述第一凸轮结构还包括第一弹性件,所述第一弹性件的一端与所述第一摆臂的所述第二端连接,另一端相对所述第一支撑架固定,所述第一弹性件用于提供使得所述第一摆臂带动所述第一滚轮与所述第一凸轮保持抵接的预紧力。
14.在其中一个实施例中,所述第一连杆结构包括第一转轴、第一连杆、第一驱动块、第一摆动块及第二滚轮;
15.所述第一转轴绕自身轴线可转动地连接在所述第一机架上;所述第一连杆铰接在所述第一摆臂与所述第一驱动块之间,所述第一驱动块固定连接在所述第一转轴上;所述第一摆动块与所述第一转轴固定连接,所述第二滚轮安装在所述第一摆动块上;所述第一定位组件具有沿与所述第一方向相交的第二方向纵长延伸的第一导向槽,所述第二滚轮与所述第一导向槽滚动配合;
16.其中,所述第一转轴的轴向与所述第一方向和所述第二方向均相交。
17.在其中一个实施例中,所述第一连杆结构还包括连杆支架、第二连杆和第三连杆,所述第二连杆绕一旋转轴线可转动地连接在所述连杆支架上,所述第二连杆具有位于所述旋转轴线相对两侧的第一铰接端和第二铰接端;所述第一连杆的一端与所述第一摆臂铰接,另一端与所述第一铰接端铰接;所述第三连杆的一端与所述第二铰接端铰接,另一端与所述第一驱动块铰接。
18.在其中一个实施例中,所述第二传动组件包括第二支撑架、第二摆臂、第二凸轮结构及第二连杆结构,所述第二摆臂具有第三端和第四端,所述第三端可转动地连接在所述第二支撑架上;
19.所述第二凸轮结构传动连接在所述驱动轴与所述第二摆臂之间,以将所述驱动轴的旋转运动转化成所述第二摆臂绕所述第三端的摆动运动;所述第二连杆结构传动连接在所述第二摆臂与所述第一找正组件之间,以将所述第二摆臂的摆动运动转化成所述第一找正组件沿所述第一方向的移动。
20.在其中一个实施例中,所述第二凸轮结构包括第二凸轮及第三滚轮,所述第二凸轮安装在所述驱动轴上,以与所述驱动轴同步旋转;所述第三滚轮安装在所述第二摆臂上,并与所述第二凸轮滚动配合。
21.在其中一个实施例中,所述第二凸轮结构还包括第二弹性件,所述第二弹性件的一端与所述第二摆臂的所述第四端连接,另一端相对所述第二支撑架固定,所述第二弹性件用于提供使得所述第二摆臂带动所述第三滚轮与所述第二凸轮保持抵接的预紧力。
22.在其中一个实施例中,所述第二连杆结构包括第二转轴、第四连杆、第二驱动块、第二摆动块及第四滚轮;
23.所述第二转轴绕自身轴线可转动地连接在所述第二机架上,所述第四连杆的一端
与所述第二摆臂铰接,另一端与所述第二驱动块铰接,所述第二驱动块固定连接在所述第二转轴上;所述第二摆动块固定连接在所述第二转轴上,所述第四滚轮安装在所述第二摆动块上;所述第一找正组件具有沿与所述第一方向相交的第二方向纵长延伸的第二导向槽,所述第四滚轮与所述第二导向槽滚动配合;
24.其中,所述第二转轴的轴向与所述第一方向和所述第二方向均相交。
25.在其中一个实施例中,所述极耳找正装置还包括第二定位机构和第二找正机构,所述第二定位机构包括第三机架及沿第一方向可移动地连接在所述第三机架上的第二定位组件,所述第二定位组件具有第二从动滚轮;所述第二找正机构包括第四机架及沿所述第一方向可移动地连接在所述第四机架上的第二找正组件,所述第二找正组件具有与所述第二从动滚轮沿所述第一方向相对布设的第二主动滚轮,所述第二主动滚轮与所述第二从动滚轮之间形成供所述电池途经的第二找正工位,在所述电池的输送方向上所述第二找正工位位于所述第一找正工位的下游;
26.所述第二定位组件通过所述第一传动组件与所述驱动轴传动连接,所述第二找正组件通过所述第二传动组件与驱动轴传动连接;所述第一传动组件和所述第二传动组件还用于将所述驱动轴的旋转运动,转化成所述第二定位组件与所述第二找正组件沿所述第一方向彼此靠近或远离的移动;
27.其中,所述第二定位组件与所述第二找正组件彼此靠近移动的过程中,能够带动所述第二从动滚轮与所述第二主动滚轮夹紧所述电池,所述第一主动滚轮用于带动被夹紧的所述电池旋转。
28.在其中一个实施例中,所述第一定位机构还包括沿所述第一方向可移动地连接在所述第一机架上的第一安装板,所述第一定位组件设置在所述第一安装板上,所述第二定位机构还包括沿所述第一方向可移动地连接在所述第三机架上的第二安装板,所述第二定位组件设置在所述第二安装板上,所述第二安装板与所述第一安装板固定连接。
29.在其中一个实施例中,所述极耳找正装置还包括极耳抚平机构,所述极耳抚平机构包括第三安装板及安装在所述第三安装板上的极耳抚平组件,所述第三安装板与所述第一安装板和/或所述第二安装板固定连接;
30.所述极耳抚平组件对应于位于所述第一找正工位与所述第二找正工位之间的极耳抚平工位布设,用于对途经所述极耳抚平工位的所述电池上的极耳进行抚平。
31.上述极耳找正装置,在实际使用过程中,当待找正的电池到达第一找正工位(即位于第一主动滚轮与第一从动滚轮之间)时,旋转驱动件驱动驱动轴旋转,从而驱动轴通过第一传动组件和第二传动组件带动第一定位组件与第一找正组件沿第一方向彼此靠近,直至第一从动滚轮与第一主动滚轮夹紧位于第一找正工位的电池。然后,控制第一主动滚轮旋转,从而带动电池旋转,直至电池上的极耳到达指定方位,即实现对电池上的极耳的找正。当位于第一找正工位的电池完成找正时,第一主动滚轮停止旋转,旋转驱动件再次驱动驱动轴旋转,从而驱动轴通过第一传动组件和第二传动组件带动第一定位组件与第一找正组件沿第一方向彼此远离,使得第一从动滚轮与第一主动滚轮沿第一方向彼此远离,并与电池分离,以便于找正完成的电池再向下游流转。
32.如此,旋转驱动件驱动驱动轴旋转,并利用驱动轴的旋转通过第一传动组件和第二传动组件分别带动第一定位组件和第一找正组件沿第一方向移动,使得第一定位组件和
可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
47.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
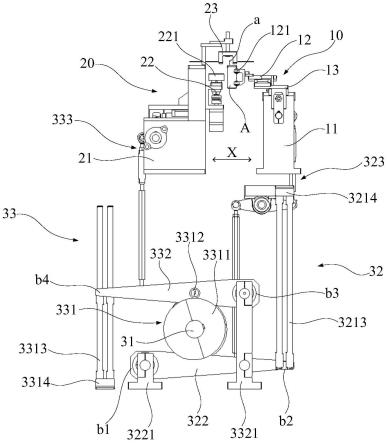
48.请参阅图1及图2,本实用新型一实施例提供了一种极耳找正装置,用于带动电池a旋转,直至电池a上的极耳a到达指定方位,即实现对电池a上的极耳a进行找正。
49.该极耳找正装置包括第一定位机构10、第一找正机构20及驱动机构(图未标)。该第一定位机构10包括第一机架11及沿第一方向x可移动地连接在第一机架11上的第一定位组件12。该第一定位组件12具有第一从动滚轮121。第一找正机构20包括第二机架21及沿第一方向x可移动地连接在该第二机架21上的第一找正组件22。该第一找正组件22具有与第一从动滚轮121沿第一方向x相对布设的第一主动滚轮221。该第一主动滚轮221与第一从动滚轮121之间形成供电池a途经的第一找正工位b1(见图9)。
50.驱动机构(图未标)包括驱动轴31、旋转驱动件(图未示)、第一传动组件32及第二传动组件33。驱动轴31与旋转驱动件驱动连接,以由旋转驱动件驱动旋转。第一传动组件32传动连接在驱动轴31与第一定位组件12之间,第二传动组件33传动连接在驱动轴31与第一找正组件22之间。第一传动组件32和第二传动组件33用于将驱动轴31的旋转运动,转化成第一定位组件12与第一找正组件22沿第一方向x彼此靠近或远离的移动。也就是说,旋转驱动件驱动驱动轴31旋转时,驱动轴31通过第一传动组件32和第二传动组件33带动第一定位组件12与第一找正组件22沿第一方向x彼此靠近或远离。其中,第一定位组件12与第一找正组件22彼此靠近移动的过程中,能够带动第一从动滚轮121与第一主动滚轮221夹紧位于第一找正工位b1的电池a,第一主动滚轮221用于带动被第一主动滚轮221与第一从动滚轮121夹紧的电池a旋转。可选地,该旋转驱动件可以采用电机。
51.上述极耳找正装置,在实际使用过程中,当待找正的电池a到达第一找正工位b1(即位于第一主动滚轮221与第一从动滚轮121之间)时,旋转驱动件驱动驱动轴31旋转,从而驱动轴31通过第一传动组件32和第二传动组件33带动第一定位组件12与第一找正组件22沿第一方向x彼此靠近,直至第一从动滚轮121与第一主动滚轮221夹紧位于第一找正工位b1的电池a。然后,控制第一主动滚轮221旋转,从而带动电池a旋转,直至电池a上的极耳a到达指定方位,即实现对电池a上的极耳a的找正。当位于第一找正工位b1的电池a完成找正时,第一主动滚轮221停止旋转,旋转驱动件再次驱动驱动轴31旋转,从而驱动轴31通过第一传动组件32和第二传动组件33带动第一定位组件12与第一找正组件22沿第一方向x彼此远离,使得第一从动滚轮121与第一主动滚轮221沿第一方向x彼此远离,并与电池a分离,以便于找正完成的电池a再向下游流转。
52.如此,旋转驱动件驱动驱动轴31旋转,并利用驱动轴31的旋转通过第一传动组件32和第二传动组件33分别带动第一定位组件12和第一找正组件22沿第一方向x移动,使得
第一定位组件12和第一找正组件22彼此靠近或远离移动的同步性较佳,从而第一主动滚轮221与第一从动滚轮121夹持或松开电池a的动作更加协调,避免由于第一定位组件12和第一找正组件22移动的同步性差而导致夹坏电池a。
53.需要说明的是,现有技术中利用两个气缸驱动而实现对电池a的夹持或松开,使得夹持或松开的动作响应速度较慢。与此相比,本实用新型中利用旋转驱动件驱动驱动轴31旋转,再利用传动的方式将旋转运动转化成第一定位组件12与第一找正组件22彼此靠近或远离的直线运动,避免了气缸驱动的延时,提高了动作响应速度。
54.请参见图4所示,本实用新型的实施例中,第一传动组件32包括第一支撑架3221、第一摆臂322、第一凸轮结构321及第一连杆结构323。第一摆臂322具有第一端b1和第二端b2,该第一端b1可转动地连接在第一支撑架3221上,使得第一摆臂322能够绕第一端b1摆动。第一凸轮结构321传动连接在驱动轴31与第一摆臂322之间,使得第一凸轮结构321将驱动轴31的旋转运动转化成第一摆臂322绕第一端b1的摆动运动。第一连杆结构323传动连接在第二端b2与第一定位组件12之间,使得第一连杆结构323将第一摆臂322绕第一端b1的摆动运动转化成第一定位组件12沿第一方向x的移动。如此,当需要带动第一定位组件12沿第一方向x移动时,旋转驱动件驱动驱动轴31旋转,驱动轴31通过第一凸轮结构321带动第一摆臂322绕第一端b1摆动,第一摆臂322再通过第一连杆结构323带动第一定位组件12沿第一方向x移动。
55.具体到实施例中,第一凸轮结构321包括第一凸轮3211及第一滚轮。该第一凸轮3211安装在驱动轴31上,以与该驱动轴31同步旋转。第一滚轮安装在第一摆臂322上,并与第一凸轮3211滚动配合。如此,驱动轴31旋转时带动第一凸轮3211同步旋转,使得第一滚轮沿第一凸轮3211滚动,从而第一凸轮3211通过第一滚轮带动第一摆臂322绕第一端b1摆动,第一摆臂322在通过第一连杆结构323带动第一定位组件12沿第一方向x移动。
56.进一步地,第一凸轮结构321还包括第一弹性件3213及第一固定座3214,第一弹性件3213的一端与第一摆臂322的第二端b2连接,第一弹性件3213的另一端与第一固定座3214连接,该第一固定座3214相对第一支撑架3221固定,使得第一弹性件3213远离第二端b2的一端相对第一支撑架3221固定。第一弹性件3213用于提供使得第一摆臂322带动第一滚轮与第一凸轮3211保持抵接的预紧力,使得在第一凸轮3211旋转的过程中,第一滚轮始终保持与第一凸轮3211抵接(即第一滚轮在第一凸轮3211上滚动,不会与第一凸轮3211分离)。可选地,该第一弹性件3213可以是拉簧。
57.具体到实施例中,第一连杆结构323包括第一转轴3235、第一连杆3231、第一驱动块3236、第一摆动块3237及第二滚轮3238。第一转轴3235绕自身轴线可转动地连接在第一机架11上。第一连杆3231铰接在第一摆臂322的第二端b2与第一驱动块3236之间。该第一驱动块3236固定连接在第一转轴3235上。第一摆动块3237与第一转轴3235固定连接。第二滚轮3238安装在第一摆动块3237上。第一定位组件12具有沿与第一方向x相交的第二方向y纵长延伸的第一导向槽131,且第一转轴3235的轴向与第一方向x和第二方向y均相交。第二滚轮3238与该第一导向槽131滚动配合。如此,当需要驱动第一定位组件12沿第一方向x移动时,驱动轴31通过第一凸轮结构321带动第一摆臂322绕第一端b1摆动,使得第一摆臂322通过第一连杆3231和第一驱动块3236带动第一转轴3235旋转。第一转轴3235再带动第一摆动块3237和第一摆动块3237上的第二滚轮3238绕第一转轴3235摆动,使得第二滚轮3238沿第
一导向槽131滚动,由于第一转轴3235的轴向与第一导向槽131的纵长延伸方向和第一方向x均相交,进而使得第二滚轮3238沿第一导向槽131滚动的同时带动第一定位组件12沿第一方向x移动。优选地,第一转轴3235的轴向、第一方向x和第二方向y两两垂直。
58.进一步地,第一连杆结构323还包括连杆支架3233、第二连杆3232和第三连杆3234。第二连杆3232绕一旋转轴线可转动地连接在连杆支架3233上,连杆支架3233相对第一机架11固定。第二连杆3232具有位于该旋转轴线相对两侧的第一铰接端b5和第二铰接端b6。第一连杆3231的一端与第一摆臂322铰接,另一端与第二连杆3232的第一铰接端b5铰接。第三连杆3234的一端与第二连杆3232的第二铰接端b6铰接,另一端与第一驱动块3236铰接。如此,当第一凸轮3211带动第一摆臂322绕第一端b1摆动的过程中,第一摆臂322通过第一连杆3231带动第二连杆3232绕旋转轴线旋转,从而第二连杆3232通过第三连杆3234和第一驱动块3236带动第一转轴3235旋转,进而使得第一转轴3235通过第二滚轮3238与第一导向槽131的配合带动第一定位组件12沿第一方向x移动。优选地,上述旋转轴线与第一转轴3235的轴向平行。
59.请参见图5至图8所示,本实用新型的实施例中,第二传动组件33包括第二支撑架3321、第二摆臂332、第二凸轮结构331及第二连杆结构333。该第二摆臂332具有第三端b3和第四端b4,且第三端b3可转动地连接在第二支撑架3321上,使得第二摆臂332能够绕第三端b3摆动。
60.第二凸轮结构331传动连接在驱动轴31与第二摆臂332之间,以将驱动轴31的旋转运动转化成第二摆臂332绕第三端b3的摆动运动。第二连杆结构333传动连接在第二摆臂332与第一找正组件22之间,以将第二摆臂332的摆动运动转化成第一找正组件22沿第一方向x的移动。如此,当需要带动第一找正组件22沿第一方向x移动时,旋转驱动件驱动驱动轴31旋转,驱动轴31通过第二凸轮结构331带动第二摆臂332绕第三端b3摆动,第二摆臂332通过第二连杆结构333带动第一找正组件22沿第一方向x移动。
61.具体到实施例中,第二凸轮结构331包括第二凸轮3311和第三滚轮3312。第二凸轮3311安装在驱动轴31上,以与驱动轴31同步旋转。第三滚轮3312安装在第二摆臂332上,并与第二凸轮3311滚动配合。如此,当旋转驱动件驱动驱动轴31旋转时,驱动轴31带动第二凸轮3311旋转,使得第三滚轮3312沿第二凸轮3311滚动。第三滚轮3312沿第二凸轮3311滚动的过程中带动第二摆臂332绕第三端b3摆动。第二摆臂332再通过第二连杆结构333带动第一找正组件22沿第一方向x移动。
62.进一步地,第二凸轮结构331还包括第二弹性件3313及第二固定座3314。该第二弹性件3313的一端与第二摆臂332的第四端b4固定连接,另一端固定连接在第二固定座3314上,该第二固定座3314相对第二机架21固定,使得第二弹性件3313远离第四端b4的一端相对第二机架21固定。第二弹性件3313用于提供使得第二摆臂332带动第三滚轮3312与第二凸轮3311保持抵接的预紧力,使得在第二凸轮3311旋转的过程中,第三滚轮3312始终保持与第二凸轮3311抵接(即第三滚轮3312在第二凸轮3311上滚动,不会与第二凸轮3311分离)。可选地,该第二弹性件3313可以是拉簧。
63.具体到实施例中,第二连杆结构333包括第二转轴3333、第四连杆3331、第二驱动块3335、第二摆动块3337及第四滚轮3339。第二转轴3333绕自身轴线可转动地连接在第二机架21上。第四连杆3331的一端与第二摆臂332铰接,另一端与第二驱动块3335铰接。第二
驱动块3335固定连接在第二转轴3333上。第二摆动块3337固定连接在第二转轴3333上,第四滚轮3339安装在第二摆动块3337上。第一找正组件22具有沿与第一方向x相交的第二方向y纵长延伸的第二导向槽2221,第二转轴3333的轴向与第一方向x和第二方向y均相交。第四滚轮3339与第二导向槽2221滚动配合。
64.如此,当需要驱动第一找正组件22沿第一方向x移动时,驱动轴31通过第二凸轮结构331带动第二摆臂332绕第三端b3摆动,使得第二摆臂332通过第四连杆3331和第二驱动块3335带动第二转轴3333旋转。第二转轴3333再带动第二摆动块3337和第二摆动块3337上的第四滚轮3339绕第二转轴3333摆动,使得第四滚轮3339沿第二导向槽2221滚动。由于第二转轴3333的轴向与第二导向槽2221的纵长延伸方向(即第二方向y)和第一方向x均相交,进而使得第四滚轮3339沿第二导向槽2221滚动的同时带动第一找正组件22沿第一方向x移动。优选地,第二转轴3333的轴向、第一方向x和第二方向y两两垂直。
65.请参见图1至图3所示,本实用新型的实施例中,第一定位机构10还包括沿第一方向x可移动地连接在第一机架11上的第一安装板13。第一定位组件12设置在该第一安装板13上,该第一安装板13通过第一传动组件32与驱动轴31传动连接,从而第一传动组件32将驱动轴31的旋转运动转化成第一安装板13沿第一方向x的移动,进而第一安装板13带动第一定位组件12沿第一方向x移动。具体地,第一安装板13上开设有沿第二方向y纵长延伸的第一导向槽131,第二滚轮3238与该第一导向槽131滚动配合,从而使得第二滚轮3238通过第一摆动块3237绕第一转轴3235摆动的同时沿第一导向槽131滚动,进而使得第二滚轮3238带动第一安装板13沿第一方向x移动。
66.具体到实施例中,第一定位组件12包括第一定位板122、第一定位块123及第一缓冲弹性件124。第一定位板122沿第一方向x可移动地连接在第一安装板13上,第一定位块123固定连接在第一定位板122上,第一从动滚轮121安装在第一定位块123朝向第一找正组件22的一侧。第一缓冲弹性件124的两端分别与第一定位板122和第一安装板13抵接,该第一缓冲弹性件124用于向第一定位板122提供一预紧力,在该预紧力的作用下使得第一定位板122具有相对第一安装板13沿第一方向x靠近第一找正组件22的移动趋势。如此,当第一安装板13带动第一定位组件12靠近第一找正组件22移动,直至第一主动滚轮221与第一从动滚轮121夹紧电池a时,第一缓冲弹性件124受压而进一步被压缩,从而对第一主动滚轮221与第一从动滚轮121对电池a的夹紧力进行缓冲,避免夹坏电池a。可选地,第一缓冲弹性件124可以是弹簧。
67.可选地,第一安装板13上设置有第一滑块,第一机架11上设置有沿第一方向x延伸的第一滑轨,第一滑块滑动连接在第一滑轨上。如此,利用第一滑块沿第一滑轨的移动,对第一安装板13相对第一机架11沿第一方向x的移动进行导向。
68.可选地,第一定位板122上设置有第二滑块,第一安装板13上设置有沿第一方向x纵长延伸的第二滑轨,第二滑块滑动连接在第二滑轨上。如此,利用第二滑块沿第二滑轨的移动,对第一定位板122相对第一安装板13沿第一方向x的移动进行导向。
69.本实用新型的实施例中,第一找正组件22包括第一找正座222及第一找正结构220,第一找正结构220包括第一安装座226、第一找正驱动件223及上述第一主动滚轮221。第一找正座222沿第一方向x可移动地连接在第二机架21上。第一安装座226固定连接在第一找正座222上,且第一主动滚轮221安装在第一安装座226朝向第一定位组件12的一侧。第
一找正驱动件223设置在第一安装座226上,且与第一主动滚轮221驱动连接,以驱动第一主动滚轮221相对第一安装座226旋转,使得第一主动滚轮221能够带动被第一主动滚轮221与第一从动滚轮121夹紧的电池a旋转。具体地,第一找正座222上开设有沿第二方向y纵长延伸的第二导向槽2221,第四滚轮3339与该第二导向槽2221滚动配合,从而使得第四滚轮3339通过第二摆动块3337绕第二转轴3333摆动的同时沿第二导向槽2221滚动,进而使得第四滚轮3339带动第一找正座222沿第一方向x移动,进而第一找正座222带动第一主动滚轮221沿第一方向x移动。可选地,第一找正驱动件223可以采用电机。
70.具体到实施例中,第一找正组件22包括三个第一找正结构220,也就是说第一找正座222上设置三个第一找正结构220。第一定位机构10包括三个第一定位组件12,也就是说第一安装板13上设置三个第一定位组件12,并且,三个第一找正结构220与三个第一定位组件12一一对应。每一第一找正结构220的第一主动滚轮221与对应的第一定位组件12的第一从动滚轮121在第一方向x上相对布设,且二者之间形成一个上述第一找正工位b1。如此,可同时对三个电池a进行找正作业,有利于提升生产效率。需要说明的是,在另一些实施例中,第一找正结构220和第一定位组件12的数量并不仅限于三个,在其他实施例中也可以是例如两个、四个等,在此不作限定。
71.具体到实施例中,第一找正机构20还包括设置在第二机架21上的第一检测组件23,该第一检测组件23对应于第一找正工位b1布设,用于检测位于第一找正工位b1的电池a上的极耳a是否到达指定位置。
72.请参见图9所示,本实用新型的实施例中,极耳找正装置还包括第二定位机构40和第二找正机构50。第二定位机构40包括第三机架及沿第一方向x可移动地连接在第三机架上的第二定位组件42。第二定位组件42具有第二从动滚轮。第二找正机构50包括第四机架及沿第一方向x可移动地连接在第四机架上的第二找正组件。该第二找正组件具有与第二从动滚轮沿第一方向x相对布设的第二主动滚轮,第二主动滚轮与第二从动滚轮之间形成供电池a途经的第二找正工位b3。在电池a的输送方向上,第二找正工位b3位于第一找正工位b1的下游。也就是说,电池a在输送的过程中首先到达第一找正工位b1,然后再到达第二找正工位b3。
73.第二定位组件42通过第一传动组件32与驱动轴31传动连接,第二找正组件通过第二传动组件33与驱动轴31传动连接。第一传动组件32和第二传动组件33还用于将驱动轴31的旋转运动,转化成第二定位组件42与第二找正组件沿第一方向x彼此靠近或远离的移动。第二定位组件42与第二找正组件彼此靠近移动的过程中,能够带动第二从动滚轮与第二主动滚轮夹紧位于第二找正工位b3的电池a。第一主动滚轮221用于带动被第二主动滚轮与第二从动滚轮夹紧的电池a旋转。
74.如此,电池a在第一找正工位b1利用第一找正组件22的第一主动滚轮221和第一定位组件12的第一从动滚轮121对该电池a上的极耳a进行初步找正。经过初步找正的电池a继续向下游输送,并到达第二找正工位b3。当经过初步找正的电池a到达第二找正工位b3时,驱动轴31旋转,从而通过第一传动组件32与第二传动组件33带动第二定位组件42与第二找正组件沿第一方向x彼此靠近,直至带动第二从动滚轮与第二主动滚轮沿第一方向x靠近并夹紧该电池a。然后,第二主动滚轮带动被第二主动滚轮和第二从动滚轮夹紧的电池a旋转,直至该电池a上的极耳a到达指定位置,即对该电池a上的极耳a进行二次找正。二次找正完
成后,驱动轴31通过第一传动组件32和第二传动组件33带动第二定位组件42和第二找正组件沿第一方向x彼此远离,使得第二从动滚轮与第二主动滚轮彼此远离而松开电池a,使得二次找正完成的电芯继续向下游输送。
75.具体到实施例中,第二定位机构40还包括沿第一方向x可移动地连接在第三机架上的第二安装板41,该第二定位组件42设置在该第二安装板41上。在一个实施例中,利用一个第一传动组件32同时带动第一安装板13和第二安装板41沿第一方向x移动,即同时带动第一定位组件12和第二定位组件42沿第一方向x移动。具体地,第二安装板41上也可开设沿第二方向y纵长延伸的第一导向槽131,并在第一转轴3235上固定连接两个第一摆动块3237,两个摆动块上均安装有第二滚轮3238。其中一个滚轮与第一安装板13上的第一导向槽131滚动配合,其中另一个滚轮与第二安装板41上的第一导向槽131滚动配合,从而第一转轴3235旋转时能够带动两个第二滚轮3238分别沿两个第一导向槽131滚动,进而两个滚轮分别带动第一安装板13和第二安装板41同步的沿第一方向x移动。
76.当然,并不仅限于采用一个传动组件同时带动第一安装板13和第二安装板41沿第一方向x移动。在另一些实施例中,也可通过两个第一传动组件32分别带动第一安装板13和第二安装板41沿第一方向x移动。具体的,第一传动组件32的数量为两个,其中一个第一传动组件32传动连接在第一安装板13与驱动轴31之间,使得驱动轴31能够带动第一安装板13沿第一方向x移动,第一定位组件12跟随第一安装板13沿第一方向x移动;其中另一个第一传动组件32传动连接在第二安装板41与驱动轴31之间,使得驱动轴31能够带动第二安装板41沿第一方向x移动,第二定位组件42跟随第二安装板41沿第一方向x移动。
77.进一步地,该第二安装板41与第一安装板13固定连接。如此,由于第一安装板13与第二安装板41固定连接,因此二者可同步的沿第一方向x移动,从而带动第一定位组件12和第二定位组件42同步的沿第一方向x移动,以便于对第一找正工位b1的电池a上的极耳a进行初步找正的同时,对第二找正工位b3的电池a上的极耳a进行二次找正。
78.需要说明的是,第二定位组件42与第一定位组件12的结构相似,故在此不作赘述。
79.具体到实施例中,极耳找正装置还包括极耳抚平机构60,该极耳抚平机构60包括第三安装板及安装在第三安装板上的极耳抚平组件。第三安装板与第一安装板13和/或第二安装板41固定连接,从而第三安装板与第一安装板13和第二安装板41沿第一方向x同步移动。极耳抚平组件对应于位于第一找正工位b1与第二找正工位b3之间的极耳抚平工位b2布设,用于对途经该极耳抚平工位b2的电池a上的极耳a进行抚平,避免电池a上的极耳a歪斜。如此,各个电池a在输送的过程中依次途经第一找正工位b1、极耳抚平工位b2和第二找正工位b3。电池a在第一找正工位b1时,利用第一主动滚轮221和第一从动滚轮121对该电池a上的极耳a进行初步找正。电池a在极耳抚平工位b2时,极耳抚平组件对该电池a上的极耳a进行抵压,以对极耳a进行抚平。电池a在第二找正工位b3时,利用第二主动滚轮和第二从动滚轮对该电池a上的极耳a进行二次找正。
80.需要说明的是,在一个实施例中,利用一个第二传动组件33将驱动轴31的旋转运动同时转化成第一找正组件22和第二找正组件沿第一方向x的移动。具体地,第二找正组件上也具有第二导向槽2221,第二转轴3333上固定连接有两个第二摆动块3337,两个第二摆动块3337上均安装有第四滚轮3339。其中一个第四滚轮3339与第一找正组件22上的第二导向槽2221滚动配合,其中另一个第四滚轮3339与第二找正组件上的第二导向槽2221滚动配
合,从而使得驱动轴31带动第二转轴3333旋转时,第二转轴3333同时带动第一找正组件22和第二找正组件沿第一方向x移动,以分别对第一找正工位b1的电池a进行初步找正,对第二找正工位b3的电池a进行二次找正。如此,利用一个第二传动组件33实现第一找正组件22和第二找正组件二者沿第一方向x运动,有利于简化结构。
81.当然,并不仅限于采用一个第二传动组件33来带动第一找正组件22和第二找正组件二者沿第一方向x移动。在另一些实施例中,也可采用两个第二传动组件33分别带动第一找正组件22和第二找正组件沿第一方向x的移动。具体地,第二传动组件33的数量为两个,其中一个第二传动组件33传动连接在驱动轴31与第一找正组件22之间,其中另一个第二传动组件33传动连接在驱动轴31与第二找正组件之间,从而驱动轴31旋转时能够分别通过两个第二传动组件33带动第一传动组件32和第二传动组件33同步的沿第一方向x移动,以分别对第一找正工位b1的电池a进行初步找正,对第二找正工位b3的电池a进行二次找正。如此,第一找正组件22和第二找正组件分别通过两个第二传动组件33带动,使得第一找正组件22和第二找正组件的运动更加稳定可靠。
82.具体到实施例中,第二找正机构50还包括设置在第四机架上的第二检测组件51,该第二检测组件51对应于第二找正工位b3布设,用于检测位于第二找正工位b3的电池a上的极耳a是否到达指定位置。
83.需要说明的是,第二找正组件与第一找正组件22的结构相似,故在此不作赘述。
84.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
85.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1