一种旋转升降机构和晶圆加工装置的制作方法
1.本实用新型涉及半导体制造技术领域,尤其涉及一种旋转升降机构和晶圆加工装置。
背景技术:
2.外延(epitaxy,epi)技术主要应用于在晶圆(wafer)衬底表面生长与衬底晶体结构一样的高质量单晶薄膜。在外延薄膜生长的过程中,需要对wafer进行加热和通入工艺气体,为控制工艺均匀性,wafer在工艺过程需要借助旋转升降机构保持旋转。
3.由于wafer的加工环境为真空环境,当晶圆加工装置断电时,旋转升降机构由于惯性仍会旋转升降,存在失控的情况发生,会损坏机体,因此,旋转升降机构需要在断电状态时,有效止位,避免旋转升降机构失控损坏机体的情况发生。
技术实现要素:
4.本技术提供了一种旋转升降机构和晶圆加工装置,通过抱闸组件的设置,实现在特定条件下(例如晶圆加工装置断电状态下),旋转升降机构的有效止位,防止旋转升降机构失控损伤机体的情况发生。
5.为了达到上述目的,本技术采用如下技术方案:
6.本技术提供一种旋转升降机构,应用于晶圆加工装置,晶圆加工装置包括工作腔室和工作台,工作台用于承载待加工的晶圆,旋转升降机构至少包括旋转升降杆和抱闸组件,其中所述旋转升降杆相对于工作腔室可旋转设置,用于带动工作台上升或下降;抱闸组件用于抱死旋转升降杆,以约束旋转升降杆的旋转运动,进而限制工作台的升降。
7.本技术的旋转升降机构通过抱闸组件的设置,实现在特定条件下(例如晶圆加工装置断电状态下),工作台的有效止位,防止旋转升降机构失控损失机体的情况发生。
8.在一个可能的实现中,抱闸组件包括抱箍、压杆和驱动部;其中抱箍抱紧于旋转升降杆,驱动部用于驱动压杆在第一位置和第二位置之间运动,当压杆运动至第一位置时,压杆向抱箍施加压力,以约束旋转升降杆的旋转运动,当杆运动至第二位置时,压杆远离抱箍,以使旋转升降杆可自由旋转运动。
9.在另一个可能的实现中,驱动部为气缸,当气缸通气时,气缸驱动压杆运动至第二位置;当气缸未通气时,气缸驱动压杆运动至第一位置。
10.在该可能的实现中,通过气路的通断,控制抱闸组件的开合,进而约束旋转升降杆的旋转,实现在断电状态下的有效止位。
11.在另一个可能的实现中,气缸对应的气源的气压为大于或等于0.4mpa且小于或等于0.7mpa。
12.在另一个可能的实现中,压杆朝向抱箍的壁面上设置压块,压杆运动至第一位置时,压块与抱箍的外壁面抵接以向抱箍施加压力,压杆运动至第二位置时,压块远离抱箍。
13.在另一个可能的实现中,压块与抱箍抵接时,压块的轴线与旋转升降杆的轴线相
交,避免压块对旋转升降杆偏心挤压。
14.可选的,为了保证压块对抱箍的旋转运动的有效锁止,压块需要满足一定刚度要求,例如压块的刚度大于或等于50n/mm,例如,压块的材质包括但不限于不锈钢、铜、铝等。
15.在另一个可能的实现中,抱箍的外壁面上沿周向设置防滑纹路,例如,抱箍的外壁面表面做滚花压痕处理等,以增大压块和抱箍之间的摩擦力,更有效的对旋转升降杆进行抱死刹车。
16.可选的,旋转升降杆为滚珠丝杆,通过滚珠丝杆实现将旋转运动转换位直线运动进而带动工作台上升或下降,同时滚珠丝杆的能量转化效率更高,精度更好,进而提升整个旋转升降机构的定位wafer精度。
17.第二方面,本技术提供一种晶圆加工装置,包括工作腔室、工作台和第一方面所述旋转升降机构,其中,工作台用于承载待加工的晶圆,旋转升降机构用于带动工作台在工作腔室内上升或下降。
18.可选的,本技术提供的一种晶圆加工装置还包括支架、安装座和转接件,其中,安装座固定安装于支架上,用于安装旋转升降杆,转接件用于将抱闸组件固定连接于安装座。
附图说明
19.下面对实施例或现有技术描述中所需使用的附图作简单地介绍。
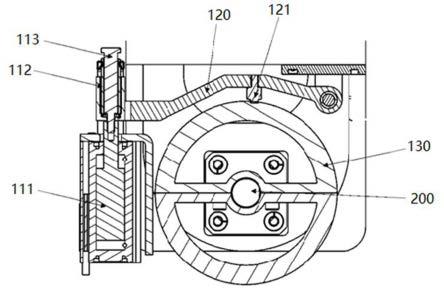
20.图1为本技术实施例提供的一种旋转升降机构的剖面图;
21.图2为本技术实施例提供的一种晶圆加工装置的结构示意图;
22.图3为本技术实施例提供的一种晶圆加工装置的一个局部的示意图;
23.图4为本技术实施例提供的一种晶圆加工装置的另一个局部的示意图。
具体实施方式
24.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
25.在本技术的描述中,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
26.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如可以是固定连接,也可以是可拆卸连接,还可以是抵触连接或一体的连接;对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
27.为了便于理解本技术实施例提供的旋转升降机构和晶圆加工装置,下面对本技术实施例涉及到的部分技术术语进行简单说明。
28.epi,在单晶衬底上,按衬底晶向生长一层新的单晶薄膜的工艺技术。可以在低(高)阻衬底上外延生长高(低)阻外延层;可以在p(n)型衬底上外延生长n(p)型外延层;可进行选择性外延;在外延过程中,可根据需要改变掺杂的种类及浓度;可生长异质、多层、多组分化合物且组分可变的超薄层;可进行低温外延;可生长不能拉制单晶的材料。epi广泛应用于cmos/logic、bicoms/bipolar、wafer manufacture和dram领域。
29.wafer:晶圆,是指制作硅半导体电路所用的硅晶片,其原始材料是硅。高纯度的多晶硅溶解后掺入硅晶体晶种,然后慢慢拉出,形成圆柱形的单晶硅。硅晶棒在经过研磨,抛光,切片后,形成硅晶圆片,也就是晶圆。
30.旋转升降机构:wafer在工艺过程,需要完成从进入腔室—上升工艺位—工艺位旋转—下降等系列动作,其中在工艺位置的旋转精度,对wafer性能具有重要影响。这一系列动作均依靠旋转升降机构完成。
31.由于空间狭小,为实现wafer在工艺前后的升降,一种方案为,采用电机+t型丝杠的形式,其中电机提供旋转动力,t型丝杠实现将旋转运动转换为直线运动,同时具有自锁功能,实现在断电状态下的止位。
32.但是,t型丝杠摩擦系数高,能量转换效率低,对电机性能要求高,同时运动精度和重复定位精度较差,无法实现wafer在工艺位的精确定位,影响wafer工艺过程的均匀性。
33.针对上述问题,本技术实施例提供一种旋转升降机构,通过在旋转升降杆的固定支撑座附近设置抱闸组件,通过气路的通断,控制抱闸组件的开合,进而约束旋转升降杆的旋转,实现在特定条件下(例如在断电状态下),的旋转升降杆的有效止位。进一步的,旋转升降杆采用能量转化效率更高,精度更好的滚珠丝杆,提升整个旋转升降机构的定位wafer精度。
34.图1为本技术实施例提供的一种旋转升降机构的剖面图。如图1所示,旋转升降机构包括抱闸组件和旋转升降杆200,旋转升降杆200可旋转设置,可将旋转运动转化为直线运动,用于带动目标物体(例如用于承载待加工的wafer的工作台)的上升或下降;抱闸组件用于在特定条件下,例如断电状态下,抱死旋转升降杆200,以对旋转升降杆进行有效止位,防止工作台在断电状态下的失控。
35.本技术实施例提供的旋转升降机构可应用于晶圆加工装置,特别是epi设备,旋转升降机构实现wafer工艺过程中,需要完成的进入腔室-上升工艺位-工艺位旋转-下降等系列动作。在断电状态下,抱闸组件抱死旋转升降杆,约束旋转升降杆的旋转运动,进而对工作台进行有效止位,避免工作台的失控,承载wafer的工作台撞击工作腔室内壁,损伤机体和损坏wafer的情况发生。
36.在一个示例中,抱闸组件包括驱动部、抱箍130和压杆120,其中,抱箍130抱紧于旋转升降杆200,驱动部用于驱动压杆120在锁止位置(即第一位置)和打开位置(即第二位置)之间运动,当压杆120运动至锁止位置时,压杆120向抱箍130施加压力,压杆120和抱箍130之间产生阻止抱箍130旋转运动的摩擦力,实现约束旋转升降杆200的旋转运动,进而对工作台进行有效止位,当压杆120运动至打开位置时,压杆120远离抱箍130,释放抱箍130,抱箍可自由旋转,进而使得旋转升降杆可自由旋转运动。
37.示例性的,驱动部包括气缸111、复位弹簧112和弹簧轴113,弹簧轴113与压杆120的自由端连接,弹簧轴113运动带动压杆120运动,当气缸111未通气时,弹簧轴113在复位弹簧112的作用下闭合,带动压杆120向抱箍130施加压力,当气缸111通气时,弹簧轴113被气缸111顶起,进而带动压杆120远离抱箍130,放开抱箍130,使得旋转升降杆200可自由旋转。如此,实现旋转升降机构在断电状态下的有效止位。
38.可选的,气缸111对应的气源的气压为0.4-0.7mpa。
39.在一个示例中,压杆120朝向抱箍130的壁面上设置压块121,当压杆120运动至锁
止位置时,压块121的端部与抱箍130的外壁面抵接,向抱箍130施加压力,产生阻止抱箍130旋转运动的摩擦力,进而约束旋转升降杆200的旋转运动。在本示例中,压块121的设置,使得压杆120的行程变短,进而使得弹簧轴113的行程变短,复位弹簧112的弹力更大,使得压块121施加于抱箍130的压力更大,压块121与抱箍130之间的摩擦力更大,止位效果更好。
40.为了增加压块与抱箍之间的摩擦力,进而得到更好的止位效果,抱箍的外壁面沿其周向设置防滑纹路,例如,抱箍的外壁面在其周向做滚花压痕处理,以增加压块和抱箍之间的摩擦力,进而得到更好的止位效果。
41.当然为了进一步增加压块与抱箍之间的摩擦力,压块朝向抱箍的端面上也可以设置防滑纹路,例如对压块的端面进行滚花压痕处理。
42.在另一个示例中,为了防止压块挤压使得旋转升降杆偏心,将压块设置为当压块与抱箍抵接时,压块的轴线与旋转升降杆的轴线相交。优选的,将压块设置为当压块与抱箍抵接时,压块的轴线经过旋转升降杆的中心。
43.可选的,为了保证压块对抱箍的旋转运动的有效锁止,压块需要满足一定刚度要求,比如压块的刚度大于或等于50n/mm,例如,压块的材质包括但不限于不锈钢、铜、铝等。
44.在另一个示例中,压杆120上也可不设置压块,当压杆120运动至锁止位置时,压杆120朝向抱箍130的壁面直接与抱箍130抵接,压杆120直接向抱箍130施加压力,产生阻止抱箍130旋转运动的摩擦力,进而约束旋转升降杆200的旋转运动。压杆与抱箍之间的接触面积更大,保证压杆与抱箍之间的有效接触,实现对旋转升降杆200止位。
45.为了增加压杆与抱箍之间的摩擦力,进而得到更好的止位效果,抱箍的外壁面沿其周向设置防滑纹路,例如,抱箍的外壁面在其周向做滚花压痕处理,以增加压杆和抱箍之间的摩擦力,进而得到更好的止位效果。
46.当然为了进一步增加压杆与抱箍之间的摩擦力,压杆朝向抱箍的壁面上也可以设置防滑纹路,例如对压杆朝向抱箍的壁面进行滚花压痕处理。
47.在本技术实施例中,旋转升降杆具有将旋转运动转换为直线运动的功能,例如旋转升降杆可以为t型丝杆和滚珠丝杆等。
48.可选的,旋转升降杆为滚珠丝杆,滚珠丝杆具有更高的能量转化效率,精度更好,可以提升整个旋转升降机构的定位wafer精度。
49.回到图1,本技术实施例提供的旋转升降机构,气缸111在未通气状态属于常闭,即保证压块121在压杆120的作用下,始终接触抱箍130,实现旋转升降杆200被抱死,无法旋转。通气时,压杆120被气缸顶起,进而带动压块121脱离抱箍130,旋转升降杆200可以自由旋转。
50.可以理解的是,图1仅仅为本技术实施例提供的一种旋转升降机构的一种示例,并不构成对本技术实施例的限定,本技术实施例提供的旋转升降机构还可以包括更多或更少的部件,例如,本技术实施例提供的旋转升降机构还可以包括,图1中未示出的,用于带动工作台旋转的旋转部件,旋转部件运动带动工作台旋转,旋转部件与旋转升降杆配合,可以实现工作台在工作腔室内的升降和旋转,例如上升旋转、下降旋转以及到达预定工作位后旋转,实现wafer的工艺均匀性。
51.当然,本技术实施例提供的旋转升降机构并不局限于应用于晶圆加工装置,在一些其他需要周期性往复运动的设备中,也可以应用本技术实施例提供的旋转升降机构,以
实现在断电等突发状况下的旋转升降机构的有效锁止。
52.本技术实施例还提供一种应用上述旋转升降机构的晶圆加工装置。该晶圆加工装置包括工作腔室、工作台和上述实施例提供的旋转升降机构,其中,工作腔室为wafer提供合适的加工环境,工作台用于承载待加工的wafer,旋转升降机构用于带动工作台在工作腔室内上升或下降。
53.图2为本技术实施例提供的一种晶圆加工装置的结构示意图。如图2所示,晶圆加工装置包括旋转升降机构21、下灯头22以及设置于下灯头22内的下灯组29、工作腔室23、上灯头24以及设置于上灯头24内的上灯组25、上透明石英26、工作台27和下透明石英28。
54.旋转升降机构21旋转带动工作台27上升或下降或旋转或升降过程中的旋转,上灯头24内的上灯组25和下灯头22内的下灯组29发出加热光线,光线透过透明石英对工作台27上承载的wafer进行加热,并向工作腔室23内通入工艺气体,以使在wafer衬底表面生长出与衬底晶体结构一样的高质量单晶薄膜。
55.图2中未示出的,晶圆加工装置还包括支架,支架用于将晶圆加工装置中的各个部件支撑固定至预设位置,例如将旋转升降机构21、下灯头22以及设置于下灯头22内的下灯组29、工作腔室23、上灯头24以及设置于上灯头24内的上灯组25、上透明石英26、工作台27和下透明石英28支撑固定为图2所示的相对位置。
56.图3为本技术实施例提供的一种晶圆加工装置的一个局部的示意图。如图3所示,气缸111通过钣金转接件302与安装座301相连,例如钣金转接件302通过紧固件紧固连接于安装座301上;旋转升降杆200可旋转安装于安装座301内。
57.图4为本技术实施例提供的一种晶圆加工装置的另一个局部的示意图。如图4所示,支架上固定设置转轴座401,压杆120的一端安装于转轴座401上,实现压杆的另一端可随气缸的驱动自由运动,实现对抱箍的开启和压紧,进而控制旋转升降杆的运动和刹车。
58.本技术实施例提供的晶圆加工装置,设置为当晶圆加工装置通电工作时,气缸的气源工作向气缸内通入气体,压杆被气缸顶起,进而带动压块脱离抱箍,滚珠丝杆可以自由转动,当晶圆加工装置处于断电状态时,气源停止向气缸内通气,在复位弹簧的作用下,压杆带动压块挤压抱箍,使压块始终与抱箍接触,实现滚珠丝杆被抱死,无法旋转。也就是说,旋转升降机构通过气路的通断,由气缸带动压杆运动,实现抱箍的开启和压紧,进而控制滚珠丝杆的运动和刹车。
59.本技术实施例提供的旋转升降机构,通过采用抱闸组件,在狭小空间,在保证wafer高精度定位的前提下,实现有效的抱闸刹车,避免断电等突发情况对系统的损坏。
60.在本说明书的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以适合的方式结合。
61.最后说明的是:以上实施例仅用以说明本技术的技术方案,而对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1