一种铁芯片自动堆叠装置的制作方法
本技术涉及变压器,尤其涉及一种铁芯片自动堆叠装置。
背景技术:
1、在变压器中,铁芯是重要的零部件,在加工铁芯的过程中,需要将若干个尺寸、形状不同的铁芯片安装到对应的位置,由于铁芯上堆叠的不同尺寸的铁芯片的位置是不同的,且叠放的铁芯片中部分铁芯片是横向放置,另一部分的铁芯片是纵向放置,这样才能保证叠放出的铁芯形状稳定,同时,铁芯片上都设有用于固定位置的定位孔,现有技术中,由于叠放装置叠放铁芯片位置的精度不足,通常是等叠放工作完成后,再通过工作人员手动整理位置不正确的铁芯片的位置并将定位件插入定位孔中,此外,由于铁芯片的厚度较薄,而且铁芯片本身的强度也比较低,因此,在夹取铁芯片的过程中,容易出现铁芯片折弯的现象。
技术实现思路
1、为了解决上述问题,本实用新型提供了一种能够保证提高铁芯片叠放位置的精度、提高铁芯片叠放效率、避免铁芯片在叠放过程中出现折弯现象的铁芯片自动堆叠装置。
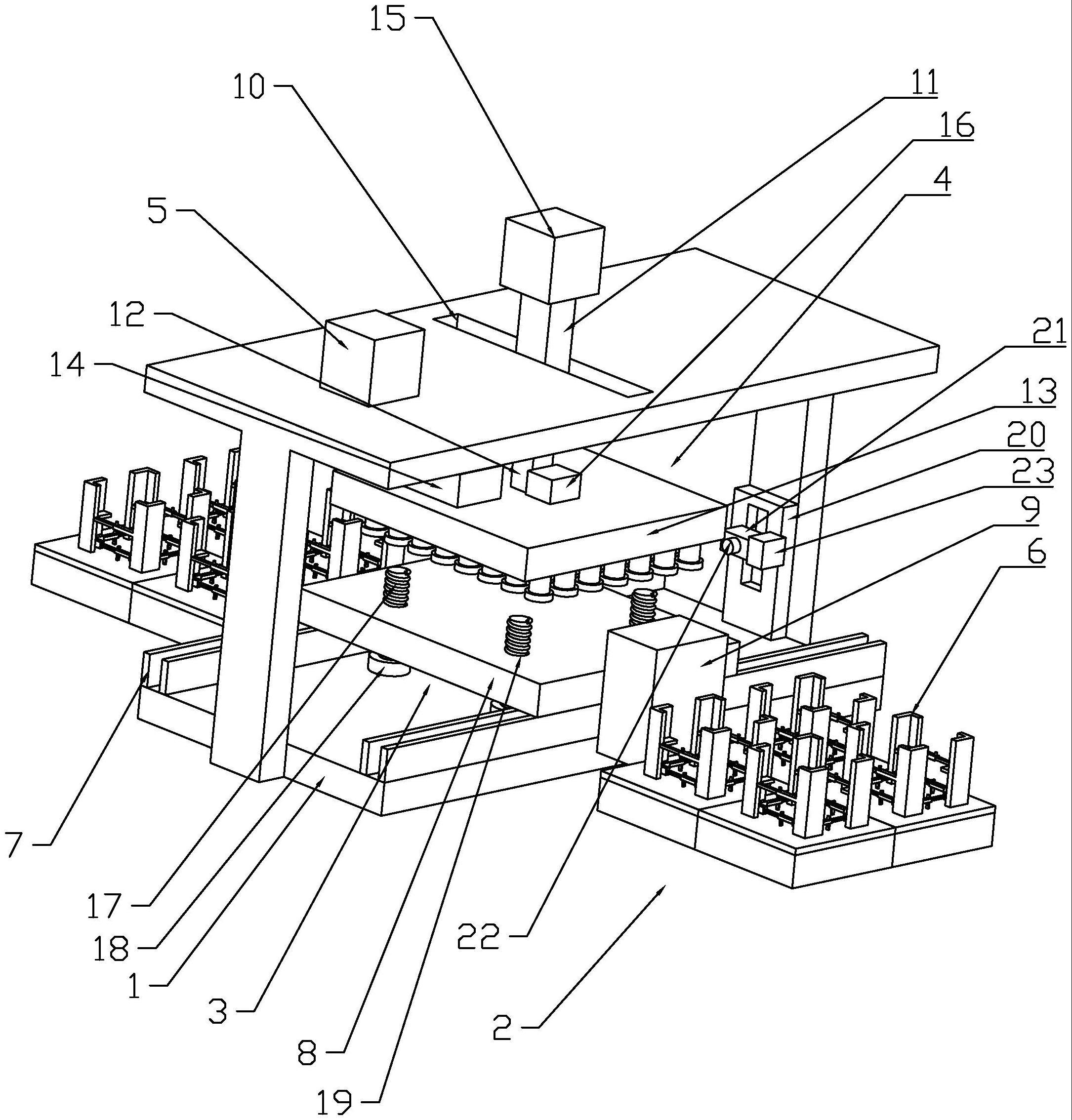
2、本实用新型的技术方案:一种铁芯片自动堆叠装置,包括设备基座、连接于设备基座的进料装置、连接于设备基座的位置固定装置、连接于设备基座的夹取装置和控制器,所述进料装置包括固定连接于设备基座的若干个固定夹具,所述位置固定装置包括固定连接于设备基座的第一滑动轨道、滑动连接于第一滑动轨道的叠放台和用于驱动叠放台运动的第一驱动电机,所述夹取装置包括连接于设备基座的第二滑动轨道、滑动连接于第二滑动轨道的水平滑动基座、滑动连接于水平滑动基座的竖直滑动基座、固定连接于竖直滑动基座的真空吸盘元件、用于为真空吸盘元件提供吸力的真空泵、用于驱动水平滑动基座在水平方向运动的第二驱动电机和用于驱动竖直滑动基座在竖直方向运动的第三驱动电机,所述第二滑动轨道位于第一滑动轨道的正上方,所述控制器分别与第一驱动电机、第二驱动电机、第三驱动电机和真空泵电连接。
3、采用上述技术方案,首先,工作人员将待叠放的铁芯片按照对应的数量放置在相应的固定夹具中,然后通过控制器控制第一驱动电机带动叠放台运动至对应的工位上,然后通过控制器控制第二驱动电机带动水平滑动基座横向滑动一定距离,使得真空吸盘元件对准固定夹具上的铁芯片,然后通过控制器控制第三驱动电机驱动竖直滑动基座竖直向下运动,同时真空泵为真空吸盘元件提供吸力,真空吸盘元件将铁芯片吸住,分别通过第二驱动电机和第三驱动电机使得真空吸盘元件运动至合适的位置,真空泵停止工作,真空吸盘元件松开铁芯片,然后控制器根据预设的铁芯的形状,每层需要的铁芯片的数量和尺寸,逐一将铁芯片堆叠在一起,大大提高了堆叠效率,同时,由于夹具是真空吸盘元件,只吸住铁芯片的表面,不会将铁芯片夹弯,进一步避免铁芯片在叠放过程中出现折弯现象。
4、本实用新型的进一步设置:所述固定夹具分别位于叠放台的两侧,叠放台两侧的固定夹具的位置对称设置。
5、采用上述技术方案,由于铁芯通常的形状都是对称的,因此,通过在叠放台两侧设置位置对称的固定夹具,方便夹取装置从两侧镜像夹取铁芯片并放置在合适的工位上,大大缩短了夹取铁芯片所需要的行程,进一步提高堆叠效率。
6、本实用新型的进一步设置:所述叠放台上设有若干个连接于叠放台的螺纹杆和用于驱动螺纹杆转动的旋转电机,所述叠放台上设有若干个螺纹孔,所述螺纹孔与螺纹杆的形状大小相适配,所述螺纹孔与螺纹杆的数量相对应,所述螺纹杆螺纹连接于螺纹孔,所述螺纹孔的位置与待加工的铁芯上的定位孔的位置相对应,所述控制器与旋转电机电连接。
7、采用上述技术方案,由于现有技术中,铁芯片上都设有定位孔,因此,通过在叠放台上设置与待加工的铁芯上的定位孔位置相对应的若干个螺纹杆,在真空吸盘元件吸取到铁芯片后,铁芯片上的定位孔穿过螺纹杆,以保证铁芯片的堆叠位置准确,同时,也方便铁芯片堆叠完成后,用户可以通过控制器控制旋转电机带动螺纹杆旋转,使得螺纹杆不露出堆叠台上表面,方便用户将堆叠完成的铁芯组件取出,避免需要人工后续整理,进一步提高工作效率。
8、本实用新型的进一步设置:所述叠放台上还设有连接板、滑动连接于连接板的若干个滑动块、若干个连接于滑动块的红外线传感器和用于驱动滑动块在连接板上滑动的伺服电机,所述红外线传感器发出的红外线信号分别对准螺纹杆的轴向方向。
9、采用上述技术方案,当叠放台上没有放置铁芯片时,螺纹杆露出叠放台上表面的高度与红外线传感器的位置相对应,当铁芯片不断叠放在叠放台上后,铁芯片堆叠的高度高于红外线传感器所在高度,由于铁芯片到红外线传感器之间的距离与螺纹杆到红外线传感器之间的距离不同,因此,此时,红外线传感器会向控制器发出电信号,控制器控制旋转电机带动螺纹杆旋转并竖直向上运动,使得螺纹杆的顶部位置高于铁芯片堆叠的高度,伺服电机带动滑动块竖直向上运动,使得红外线传感器的位置与螺纹杆的顶部位置相对应,这样做的好处是,保证螺纹杆的位置始终仅比铁芯片堆叠的高度高1cm,保证真空吸盘元件松开铁芯片时,铁芯片下滑过程不会由于行程过长导致铁芯片的位置发生偏移,从而实现提高铁芯片叠放位置的精度的作用。
技术特征:
1.一种铁芯片自动堆叠装置,其特征在于:包括设备基座、连接于设备基座的进料装置、连接于设备基座的位置固定装置、连接于设备基座的夹取装置和控制器,所述进料装置包括固定连接于设备基座的若干个固定夹具,所述位置固定装置包括固定连接于设备基座的第一滑动轨道、滑动连接于第一滑动轨道的叠放台和用于驱动叠放台运动的第一驱动电机,所述夹取装置包括连接于设备基座的第二滑动轨道、滑动连接于第二滑动轨道的水平滑动基座、滑动连接于水平滑动基座的竖直滑动基座、固定连接于竖直滑动基座的真空吸盘元件、用于为真空吸盘元件提供吸力的真空泵、用于驱动水平滑动基座在水平方向运动的第二驱动电机和用于驱动竖直滑动基座在竖直方向运动的第三驱动电机,所述第二滑动轨道位于第一滑动轨道的正上方,所述控制器分别与第一驱动电机、第二驱动电机、第三驱动电机和真空泵电连接。
2.按照权利要求1所述的一种铁芯片自动堆叠装置,其特征在于:所述固定夹具分别位于叠放台的两侧,叠放台两侧的固定夹具的位置对称设置。
3.按照权利要求1所述的一种铁芯片自动堆叠装置,其特征在于:所述叠放台上设有若干个连接于叠放台的螺纹杆和用于驱动螺纹杆转动的旋转电机,所述叠放台上设有若干个螺纹孔,所述螺纹孔与螺纹杆的形状大小相适配,所述螺纹孔与螺纹杆的数量相对应,所述螺纹杆螺纹连接于螺纹孔,所述螺纹孔的位置与待加工的铁芯上的定位孔的位置相对应,所述控制器与旋转电机电连接。
4.按照权利要求3所述的一种铁芯片自动堆叠装置,其特征在于:所述叠放台上还设有连接板、滑动连接于连接板的若干个滑动块、若干个连接于滑动块的红外线传感器和用于驱动滑动块在连接板上滑动的伺服电机,所述红外线传感器发出的红外线信号分别对准螺纹杆的轴向方向。
技术总结
一种铁芯片自动堆叠装置,包括设备基座、进料装置、位置固定装置、夹取装置和控制器,所述进料装置包括若干个固定夹具,所述位置固定装置包括第一滑动轨道、叠放台和第一驱动电机,所述夹取装置包括连接于设备基座的第二滑动轨道、滑动连接于第二滑动轨道的水平滑动基座、滑动连接于水平滑动基座的竖直滑动基座、固定连接于竖直滑动基座的真空吸盘元件、用于为真空吸盘元件提供吸力的真空泵、用于驱动水平滑动基座在水平方向运动的第二驱动电机和用于驱动竖直滑动基座在竖直方向运动的第三驱动电机,所述第二滑动轨道位于第一滑动轨道的正上方,所述控制器分别与第一驱动电机、第二驱动电机、第三驱动电机和真空泵电连接。
技术研发人员:徐仲周,徐正华,徐伟,周美汉
受保护的技术使用者:温州现代电力成套设备有限公司
技术研发日:20221209
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!