无接触式输送设备的制作方法
本发明涉及一种根据权利要求1前序部分所述的无接触式输送设备。尤其是,根据本发明的输送设备适合用于在装配技术、生物工业、化学工业、制药工业和食品工业中的以及在太阳能电池制造/显示器制造、医疗技术、实验室自动化和物流中的工业应用。特别优选的是输送设备在半导体工业中的应用。
背景技术:
1、在技术生产的框架中,经常需要对有效载荷进行运输或者定位,所述有效载荷例如是材料、工件、工具或者产品。对此,不仅已知接触式输送设备、还已知无接触式输送设备,所述输送设备例如在机械工程和基础建设中应用,例如用于在包装机器中运输有效载荷、用于机器元件的定位或者用于使工具尽可能精确地对准工件(例如用于激光加工),或者在半导体工业中用于在晶片集群设施或者说步进机设施中对衬底进行涂覆、曝光或者结构化。在此,能够使用用于磁悬浮的系统。
2、在磁悬浮的情况下的挑战在于,创建稳定地在磁场中悬浮的结构。另一挑战在于,根据目标预给定自动地在全部六个自由度(在平移和旋转方面各三个自由度)中定位和/或移动悬浮的结构,这也被称为完全的磁悬浮。
3、根据de 102016224951 a1,能够实现相对于定子对承载有效载荷的运输体的这种类型的受控制的输送和定位,其方式是,两个元件中的一个元件具有多个调整磁铁,所述调整磁铁以至少部分能够运动的方式布置,所述调整磁铁相对于该元件的相应的位置和/或取向能够通过调整元件以受控制的方式预给定,并且两个元件中的另一个元件具有至少两个固定磁铁,所述固定磁铁以不能够运动的方式与该元件连接,其中,所述固定磁铁与调整磁铁磁性耦合。输送设备设立用于,通过调整磁铁的受控制的定位和/或取向而相对于定子输送运输体。在此,运输体也被带到并且保持到相对于定子的、期望的位置和/或取向中。
4、de 102016224951 a1提供如下优点:借助相应的调整元件通过调整磁铁的对应的定位和/或取向能够实现运输体相对于定子的悬浮和/或向前运动。由此,能够省去复杂布置的提供和对磁铁线圈的操控。这不仅降低输送设备的复杂性并且因此降低制造成本,还允许使用永磁体,所述永磁体经常能够提供比能够用于这种类型的目的的磁铁线圈大得多的磁通密度。这反过来能够实现定子与运输体之间的更大的提升高度或更大的间隙,由此能够在沿z方向或者在俯仰角度范围和滚动角度范围中运动时产生更大的运动余地。此外,这提供如下优点:电能供给的中断也不一定必然导致功能性故障或者甚至造成损坏。尤其是,功率供给的中断不导致磁场的损耗或定子与运输体之间的磁性耦合的损耗。例如,在功率供给中断的情况下,如果调整磁铁的位置和/或取向顺从于固定磁铁的吸引力作用,则调整磁铁与固定磁铁之间的耦合力能够增加,进而运输体被拉到定子上并且如此被固定以防不受控制地落下来。定子与运输体之间的磁性耦合不仅能够引起运输体的悬浮,即在定子上方的提升,还能够引起运输体相对于定子的前进、即输送,而不会为此还强制性地需要另外的接触式或者无接触式系统。
5、因此,能够实现无接触式运输,从而使得所公开的输送设备也能够在具有提高的清洁度要求的环境中使用。例如,运输体能够在具有提高的清洁度要求的环境中被输送,而定子布置在外面在具有较低的清洁度要求的环境中。分离元件能够伸展穿过定子与运输体之间的间隙,以便分离不同的清洁度区域。因此,所公开的输送设备还适合用于在生物方法、化学方法和/或制药方法中应用,以及例如在气密的、液密的和/或封装的区域中应用。
6、在典型的半导体生产线中,在生产设施(例如集群工具)中加工晶片。通常,晶片在常压下在运输容器中在生产设施之间运输,其中,该运输作为具有25件的典型批次大小的批次实现。在生产设施内,通常在超高真空(uhv)下对晶片进行加工和运输。生产设施包括用于加工晶片的至少一个过程站、根据本类属的用于在真空中运输晶片的输送设备和用于存储未经加工的和经加工的晶片的存储区域。至少一个过程站、输送设备和存储区域被围框在真空密封的腔室中,并且能够被抽成真空为uhv。所述腔室以侧向地彼此相邻的方式布置,并且——可能经由真空密封的闸门——相互连接。
7、为了在运输容器与生产设施之间递送晶片,并且为了在真空区域中存储多个晶片,在生产设施处存在所谓的真空装载锁。运输容器在常压下被插入到真空装载锁中,接下来将真空装载锁抽成真空。然后,真空装载锁与生产设施的输送区域之间的真空闸门打开,晶片从输送设备穿过闸门从运输容器中取出或者被插入到运输容器中。
8、在将所有晶片从运输容器中取出、加工并且再次保存在运输容器中之后,关闭真空闸门并且给真空装载锁通风。接下来,运输容器在常压下从真空装载锁中取出,并且例如被运输至下一个生产设施。
技术实现思路
1、本发明的任务在于,提供一种输送设备,该输送设备能够实现复杂且高效的运动流程。运输体的功能范围应能够以用于搬运(handhabung)、定位、固定(例如夹紧)、加工和/或检查有效载荷的功能来拓宽,所述有效载荷处在运输体上或者该运输体的环境中。在技术生产中或者在物流中,应以高自动化程度、高效率和高经济性来实现新的功能和流程。
2、该任务通过具有权利要求1的特征的输送设备来解决。在从属权利要求中描述本发明的其他有利构型。
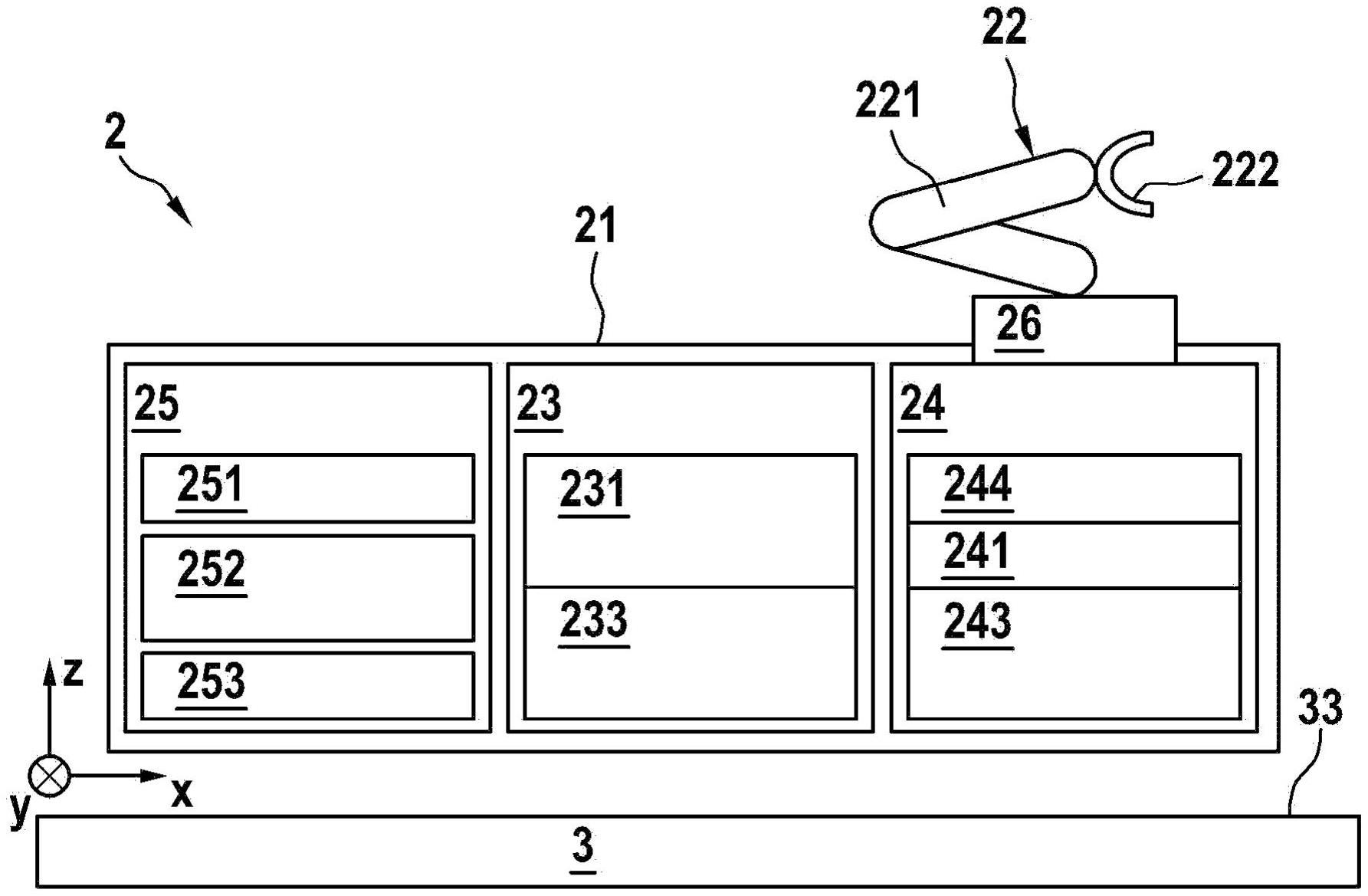
3、根据本发明的输送设备设计用于至少一个运输体(移动装置)的无接触的运动,该运输体配备有操纵器。操纵器与运输体——更准确地说与该运输体的壳体——连接,要么作为能够更换的模块、要么作为该运输体的固定组成部分,并且由该运输体携带。带有相连接的操纵器的运输体能够通过定子的磁场在该运输体的六个运动自由度中相对于定子定位。除此之外,操纵器具有至少一个另外的运动自由度,该另外的运动自由度能够在运输体的悬浮运行的情况下相对于运输体的壳体定位。
4、通过壳体的和操纵器的自由度的同步运动控制,复杂且高效的运动流程变得可能。操纵器以用于搬运、定位、固定(例如夹紧)、加工和/或检查有效载荷的功能来拓宽运输体的功能范围,所述有效载荷处在运输体上或者该运输体的环境中。具有操纵器的运输体开辟根据本发明的输送设备的许多新的应用领域。在技术生产中或者在物流中,具有操纵器的运输体以高自动化程度、高效率和高经济性来实现新的功能和流程。
5、根据本发明被携带在运输体上的操纵器取代固定的操纵器,如果该运输体不具有自己的搬运功能的话,则必须在装载地点和目标地点处提供所述固定的操纵器。需要驶向的位置的数量越高,对固定部件的节省就越多,从而对整个设施的复杂性和成本的降低就越多。
6、在一种典型的应用中,操纵器具有终端执行器,借助该终端执行器,在装载的地点处将有效载荷装载到运输体上并且在目标地点处将有效载荷放下。操纵器还能够具有夹紧功能,借助该夹紧功能,有效载荷在运输期间被可靠地保持在运输体上。另外,操纵器能够设置用于,在运输期间进行有效载荷的重新取向,以便在目标地点处以正确的取向递送有效载荷,而无需额外的时间花费。
7、在另一种应用中,操纵器是运动学装置,该运动学装置引导所述终端执行器、例如过程工具或者检查器件。如此配备的运输体能够借助该工具来加工或者借助该检查器件来检查所携带的有效载荷或者在该运输体的环境中的有效载荷。在此,该运输体具有高的运动灵活性。另一个时间上的或者经济上的优点由在同时实施运输任务和操纵任务的情况下流程的并行化产生。除此之外,能够配备有一个操纵器,以便实施多个功能(例如搬运和检查)。另外,在一个运输体上能够存在有多个操纵器。
8、最后,能够存在有多个运输体,所述多个运输体共同完成任务。例如,将工件固定在不具有操纵器的第一运输体上并且运输该工件。具有操纵器的第二运输体陪伴该第一运输体,并且借助操纵器在所运输的工件处实施搬运任务、加工任务或者检查任务。
9、已经提到的对有效载荷的重新取向也能够借助根据本发明的输送设备的多个运输体来实现。
10、如果工件例如是晶片,则在半导体工业中使用根据本发明的输送设备的情况下,产生特殊的优点。有利地,运输体用于在生产设施的真空运输空间中输送半导体晶片。定子布置在真空运输空间的下方。在这种类型的生产设施(集群工具)中的典型的运输任务在于,从过程站的过程巢中取出晶片并且将该晶片输送到别的过程站的过程巢中。由于过程站在生产设施中侧向地布置在运输空间旁边,并且运输体因此不能够直接到达所述过程站,因此,根据本发明的操纵器桥接从过程巢到运输空间中的运输路段。根据本发明的操纵器能够实现,在空间上与运输空间或者说与输送设备错位地容纳并保存晶片,其中,晶片的重心能够远离运输体。
11、操纵器具有至少一个自由度,该至少一个自由度在(例如从过程巢)到运输体的运动轨道上引导终端执行器,该终端执行器可能装载有有效载荷(晶片)。在此,运动学装置收合,并且与运输体和有效载荷(晶片)一起形成紧凑的单元,该紧凑的单元所占用的运输面比类似的具有刚性终端执行器的运输体所占用的运输面小大约2-4倍。将操纵器移动出来,例如用以在过程巢前方进行装载和卸载。在运输期间,该操纵器处在收缩状态中,以便能够更好地调动运输体。能够利用所节省的运输面,以便增加在定子上方(在运输空间中)的运输体的数量并且因此提高(生产设施的)输送设备的产量和经济性。操纵器能够以可变的方式定位。在运输体在运输面上的位置相同的情况下,该运输体能够将有效载荷(晶片)移动到在该运输体的终端位置之间的任意的中间位置中。因此,在用于晶片的生产设备的情况下,能够在与定子的运输面的不同间距中给过程巢供料。
12、除了收缩运动之外,操纵器能够具有另外的自由度。例如,能够设置具有两个自由度的操纵器,其中,第一自由度在平行于运输面的平面中实施所描述的收缩运动,第二自由度实施垂直于运输面的提升运动。虽然提升运动能够已经作为运输体的自由度来定位,但是由于悬浮方法的原因,调整范围被限制得较窄。操纵器能够设计用于较大的提升范围。配备有该操纵器的运输体能够给布置在不同高度上的过程巢供应晶片。给在装载锁中的晶片盒供料也是可能的,其中,有针对性地给晶片盒的多个垂直地上下相叠地布置的格层中的一个格层供料。
13、与不具有操纵器的运输体相比,实现下述优点或者能够借助优选的构型实现下述优点:
14、a)拓宽的工作范围:操纵器能够具有运动学装置,该运动学装置在其自由度的框架中延展越过运输体的极限,并且因此到达位于不具有操纵器的运输体的工作范围之外的地点。例如,到达侧向地在运输面旁边的地点,或者到达在运输面的上方在不同高度上的地点。
15、b)整个设施的降低的复杂性:操纵器能够在不同的提供地点处容纳有效载荷,将所述有效载荷输送到运输体上,并且在目标地点处再次放下所述有效载荷,而不需要另外的固定的搬运设备。因此,一个移动的操纵器必要时能够取代多个固定的操纵器。由此降低整个设施的复杂性和成本。
16、c)减小的运输面:为了将具有操纵器和有效载荷的运输体的外部尺寸保持得小,操纵器能够将有效载荷输送到运输体的中心中、尤其是运输到该运输体的壳体上方。因此,在运输期间使由运输体所占用的运输面最小化,例如与具有刚性终端执行器的运输体相比小2-4倍。这具有多个有利效果,所述有利效果在d)-f)中描述。
17、d)更高的产量:借助在c)中描述的处理方式,能够在预给定的运输面上放置更多的运输体,从而使得产量增加。
18、e)小的设施尺寸:在预给定的数量的运输体的情况下,借助在c)中描述的处理方式,能够减小运输面,这例如在半导体生产中在具有高的运行成本的真空运输空间中导致产生明显的成本优势。
19、f)更好的可调动性:借助在c)中描述的处理方式,运输体能够呈现小的外部尺寸,然后,该运输体能够更容易调动。省去补偿运动,运动轨道变得更短,调动被加速,转向调动能够在不妨碍别的运输体的部位上执行,也能够在具有小的尺寸的运输空间中执行。
20、g)时间增益和效率增益。在运输有效载荷期间,能够执行在有效载荷处的搬运任务、加工任务或者检查任务。通过流程的这种并行化,减小加工的循环时间。
21、h)纯机械的构造:由运输体和操纵器组成的设备能够纯机械地构造,而不具有电气部件或者说电子部件。定子承担精确的定位,并且提供机械能量用于运输体的前进并且用于驱动操纵器。能量借助磁场从定子传递给运输体或者说该运输体的操纵器。由此,构造变得非常节省空间、轻便和便宜。由于不需要携带储能器,因此也不需要规划用于给储能器充电的时间和面积。在没有电子装置的情况下,不产生损耗热量,也无需进行冷却。这特别是在真空中是有利的,在真空中,热量从悬浮设备中的导出只能够在小范围中通过辐射来实现。纯机械的构造能够设计用于明显更高的运行温度,因为省去常见的用于保护电子装置和储能器的温度限制。纯机械的设备能够针对在特殊条件下的使用来优化,尤其是在真空中(在使用真空兼容的材料的情况下)、在有爆炸危险的区域中(因为不存在形成电火花的风险)、在气体环境下或者在液体中,甚至在最高的环境压力下。
22、i)通过模块化带来的灵活性:运输体与操纵器之间的机械接口能够具有快速夹紧设备和联接器,从而不同类型的操纵器能够交替地用到不同类型的运输体上。操纵器的更换能够快速且简单地执行,以手动的或者自动的方式,以便为新的应用来准备该运输体。
23、优选地,运输体和配属的有效载荷容纳在密封的运输空间中。定子布置在密封的运输空间的下方。优选地,运输体的相应的壳体同样是密封的。因此,提出一种用于有效载荷、尤其是晶片的输送设备,所述有效载荷能够在特殊环境下、即不在正常条件下在不同的过程站中被加工。同样在特殊环境中、即不在正常条件下实现借助根据本发明的输送设备的运输体对有效载荷的运输。
24、优选地,在密封的运输空间中,设置有气体(例如保护气体、氮气或者惰性气体)或者气体混合物(例如经清洁的空气)或者真空或者超高真空(例如直到10-7或者10-8巴)或者无菌区域或者abc保护区域或者液体(例如直到2巴)。
- 还没有人留言评论。精彩留言会获得点赞!